贴接式全自动蔬菜嫁接机控制系统的设计与实现
2016-08-29王哲禄
王哲禄
(温州职业技术学院,浙江温州 325000)
贴接式全自动蔬菜嫁接机控制系统的设计与实现
王哲禄
(温州职业技术学院,浙江温州 325000)
为了实现贴接法全自动蔬菜嫁接机的控制,根据其工作原理设计了基于N∶N网络的控制系统,并进行软件SFC步进顺序编程实现。试验结果表明:贴接法全自动嫁接机的控制系统工作运行情况良好且速度稳定,可满足设计的要求。
自动嫁接机;PLC;电机控制
嫁接是农业生产中一门古老而又新兴的技艺,其具有克服连作障碍、增强植株的抗病虫害能力和抗逆性、提高产量等作用。嫁接技术在农业发达的国家得到了广泛的应用与推广[1-2]。由于传统的嫁接技术主要靠人工作业,嫁接作业具有时令性,操作人员劳动强度大且生产效率不高。随着机械电子技术、计算机控制技术的发展,工程技术学促使园艺学方面实现了自动化,蔬菜嫁接机随着农业科学自动化的发展孕育而生,它可以在短时间内将接穗和砧木迅速接合,大大提高了嫁接作物的成活率、嫁接速度及效率。20世纪90年代,日韩在其国内首先开展了自动化与蔬菜嫁接结合技术的研究和开发,并进行推广。随后我国在中国农业大学张铁中教授的带领下也开展了蔬菜嫁接机的研究。目前我国蔬菜嫁接机还处于半自动到全自动的改良阶段[3-4]。基于此,笔者采用三菱FX系列PLC[5-6],以三菱的N∶N网络通讯为基础设计一套贴接法嫁接装置的全自动控制系统,以期为我国蔬菜自动化嫁接技术发展提供科学依据。
1 全自动嫁接机的工作原理
1.1全自动嫁接机的机构组成全自动化嫁接机的机构部分包括自动嫁接装置和2个上苗装置,实物如图1、2所示。自动嫁接装置主要完成贴接嫁接的主要动作,自动上苗装置完成嫁接苗中接穗和砧木的供给。

图1 贴接法嫁接机Fig.1 Cut-pasted vegetable grafting robot

图2 自动上苗装置Fig.2 Automatic seedling feeding device
1.2全自动嫁接机的工作原理全自动嫁接机的工作原理如图3所示。其工作时,自动上苗装置自动供给接穗和砧木,完成上苗装载后,自动嫁接装置判别接穗和砧木是否装载,砧木和接穗分别由步进电机带动到切削工位进行切削,切削完成后搬运到接合工位,感知接穗和砧木就绪后启动接合程序,将嫁接夹送入工位进行嫁接,然后嫁接苗下落,整个系统复位重新工作。

图3 全自动嫁接机工作流程Fig.3 Working process of full automatic grafting robot
1.3全自动嫁接机的上苗工作流程及路径全自动嫁接机的自动上苗装置的上苗工作流程及路径如图4所示。由于并联机构刚度大,速度快,因此采用二自由度的2-PRR并联机械臂为控制对象,其主要控制2个电机带动滑块进行运动,其模型如图5所示,其中滑块3和滑块7在导杆1上运动,并与杆4、杆5、杆6、杆7以及工作平台2组成平行四边形结构。

图4 上苗路径Fig.4 Seedling feeding path

图5 2-PRR并联机构Fig.5 The 2-PRR parallel mechanism
2 控制系统的设计
2.1硬件系统的设计
2.1.1PLC的选型及通讯网络组建。在综合考虑全自动嫁接机控制系统的工作模块、通讯连接、步进控制、I/O口数量等因素后,选用三菱PLC的FX2N-48MT作为嫁接模块的控制器,选用1对FX1N-40MT分别作为接穗和砧木自动上苗装置的控制器,且2种PLC均带有2个高速脉冲输出口,便于嫁接装置和自动上苗装置中步进电机的控制。同时组建N∶N通信网络系统,如图6所示,以嫁接模块为主站、自动上苗装置为2个从站进行控制。
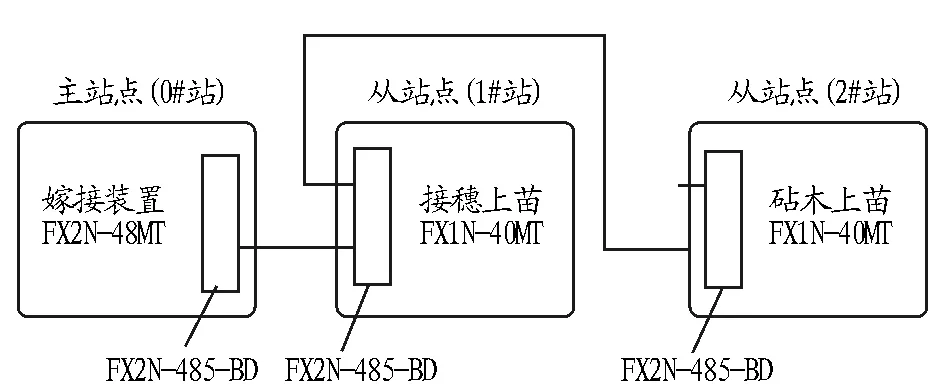
图6 全自动上苗装置控制系统通讯网络Fig.6 Communication network of the control system for full automatic seedling feeding device
2.1.2PLC的I/O分配。全自动蔬菜嫁接机的控制系统的硬件主要由PLC、按钮开关、气动电磁阀、步进驱动器等组成,从而控制气动元件和步进电机按照一定的顺序进行工作。工作中嫁接装置和砧木接穗上苗装置均分别由独立的PLC进行控制,故对其I/O分配比较方便。嫁接装置控制系统I/O分配见表1,砧木接穗自动上苗装置I/O分配见表2。

表1 嫁接装置控制系统I/O分配
表2砧木接穗自动上苗装置I/O分配
Table 2I/O allocation for full automatic seedling feeding device of stock and scion
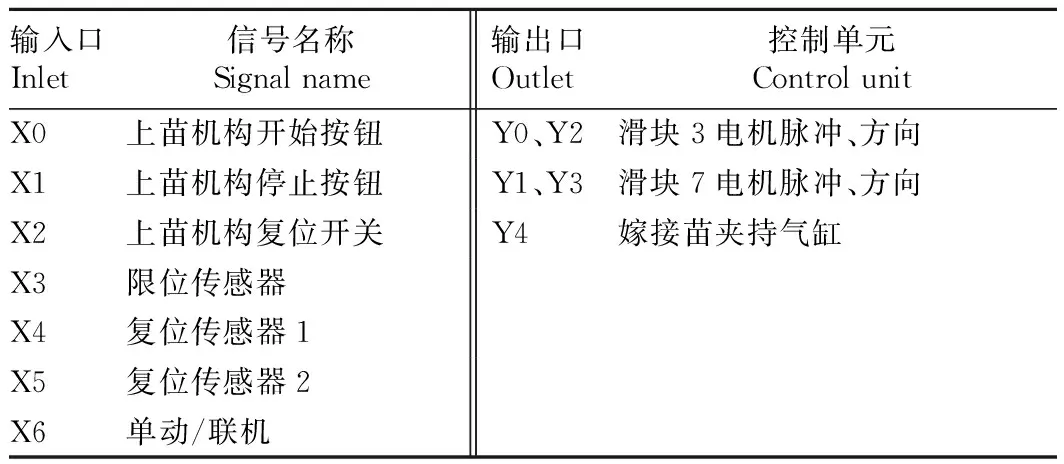
输入口Inlet信号名称Signalname输出口Outlet控制单元ControlunitX0上苗机构开始按钮Y0、Y2滑块3电机脉冲、方向X1上苗机构停止按钮Y1、Y3滑块7电机脉冲、方向X2上苗机构复位开关Y4嫁接苗夹持气缸X3限位传感器X4复位传感器1X5复位传感器2X6单动/联机
2.1.3PLC对步进电机的控制。在嫁接装置和上苗装置中均用到了步进电机,其中接穗砧木上苗装置机械臂中分别用到了2个,嫁接装置中进行嫁接苗搬运的机械臂也用到了2个。该系统选用的是SH-20403型的驱动器和56BYG250C型的混合式步进电机,采用PLSY指令脉冲频率和脉冲个数进行电机控制,通过步进电机的控制来实现机械臂的运动,从而实现上苗和嫁接整个过程。
2.2软件系统的设计
2.2.1通讯网络的软件设定。全自动蔬菜嫁接机的控制网络以N∶N为基础,设定以嫁接装置为主站0,以砧木上苗装置为从站1,以接穗上苗装置为从站2,在通讯网络中进行软件设定,如图7~9所示。

注:M8038表示N∶N网络参数设置;D8176表示站点号设置;D8177表示从站点总数设置;D8178表示设置模式范围;D8179表示重试次数;D8180表示通信超时设置。Notes:M8038 is N∶N network parameter setting;D8176 is station number setting;D8177 is total number setting of auxiliary stations;D8178 is the range of setting mode;D8179 is the retries;D8180 is timeout setting of communication.图7 嫁接装置主站0软件设定Fig.7 Setting of software 0 for main station of grafting robot

注:M8038表示N∶N网络参数设置;D8176表示站点号设置。Notes:M8038 is N∶N network parameter setting;D8176 is station number setting.图8 砧木上苗从站1软件设定Fig.8 Setting of software 1 for auxiliary station of stock seedling feeding

注:M8038表示N∶N网络参数设置;D8176表示站点号设置。Notes:M8038 is N∶N network parameter setting;D8176 is station number setting;图9 接穗上苗从站2软件设定Fig.9 Setting of software 2 for auxiliary station of scion seedling feeding
2.2.2PLC程序的设计。PLC程序的设计主要是自动上苗装置和嫁接装置的控制。控制程序的设计主要以三菱的GX Developer软件为平台,采用SFC顺序功能图进行程序编写,以工作“步”为中心,根据转换条件进行逻辑处理。当PLC接收到自动取苗信号时,相应地输出移动高速脉冲以及方向脉冲信号到步进电机驱动器中,从而驱动2个步进电机各自的转动,最终实现控制机械臂竖直和水平方向的移动,末端执行器完成取苗动作。编程取苗流程如图10所示。
根据嫁接装置的过程,其顺序功能状态如图11所示,其状态转换以其内部时间继电器和传感器为条件进行转换。S0为系统初始状态,然后进行并行控制,S10、S20分别为接穗和砧木的装载状态,S11、S21分别为接穗和砧木的夹持搬运状态,S12、S22分别为接穗和砧木的切削状态,S13和S23分别为接穗和砧木的搬运至贴合状态,S30~S33分别为推嫁接夹、松开嫁接夹具、接穗砧木气爪松开、系统复位。
3 试验结果
为了测试全自动嫁接机控制系统的功能特性,进行整机联机调试,所选用的接穗采用京欣1号,砧木采用浙蒲2号,以5×10穴盘进行培育试验,自动上苗和嫁接完成苗分别如图12、13所示。试验结果表明,全自动嫁接作业平均速度为700株/h,成功率达85%。
4 小结
该研究设计的以三菱PLC的N∶N通讯网络为基础的控制系统工作简单,稳定性高,可大大提高工作效率,具有很大的实用价值。

图10 编程取苗流程Fig.10 Programmed seedling pick-up process

图11 嫁接装置顺序功能Fig.11 Sequence function of grafting robot

图12 自动上苗Fig.12 Automatic seedling feeding

图13 嫁接完成苗Fig.13 Grafting of completed seedlings
[1] 辜松.蔬菜工厂化嫁接育苗生产装备与技术[M].北京:中国农业大学出版社,2006.
[2] 近藤直,门田充司,野口伸共.农业机器人[M].乔军,陈兵旗,译.北京:中国农业大学出版社,2009.
[3] 沈卫平,张路.蔬菜嫁接机自动上苗装置研究[J].轻工机械,2010,28(2):22-26.
[4] 姜凯,辜松,郑文刚,等.瓜科全自动嫁接机设计与试验[J].农机化研究,2010(12):129-132.
[5] 项伟灿,张路,武传宇,等.直插式自动嫁接机控制系统的设计[J].机电工程,2009,26(10):52-53,61.
[6] 赵金英,张铁中.PLC在自动嫁接机控制系统中的应用[J].中国农业大学学报,2004,9(6):53-55.
Design and Realization of Full Automatic Control System for Cut-pasted Vegetable Grafting Robot
WANG Zhe-lu
(Wenzhou Vocational and Technical College, Wenzhou, Zhejiang 325000)
To realize the control of cut-pasted vegetable grafting robot, N∶N network based control system was designed according to its operating principle, combining with software SFC stepped programming. Test results indicate that the automatic control system for grafting robot meets the design requirements, its operation is excellent, and operating speed is steady.
Full automatic vegetable grafting robot; PLC; Motor control
王哲禄(1987-),男,浙江乐清人,助教,从事农业机械化、机器人化研究。
2016-05-25
S 22
A
0517-6611(2016)19-215-03