TDMA数据链系统定位导航设计与应用
2016-08-29四川九洲电器集团有限责任公司杨其聪
四川九洲电器集团有限责任公司 杨其聪
TDMA数据链系统定位导航设计与应用
四川九洲电器集团有限责任公司杨其聪
本文针对时分多址(TDMA)数据链导航和惯性导航的系统不足,实现了一种基于TDMA接入方式的数据链导航处理器,通过卡尔曼滤波将惯性导航系统(INS)与数据链结合起来,提高导航精度,增强数据链系统作战性能,符合现代化立体作战发展需求。
TDMA;数据链;INS;卡尔曼滤波
1 引言
战术数据链在现代战争中发挥着极其重要的作用,数据链应用的水平在很大程度上决定着信息化战争的水平和能力。但是,数据链系统自身位置信息更新率较低、无姿态信息,难以满足高动态战机火控和轰炸机武器投放的要求。作为自主式推航系统,INS隐蔽性好、短时精度高、输出信号连续,并能提供姿态数据,但有积累误差,限制了长时间工作的性能。若将数据链与INS构成组合导航系统,相互取长补短,互为余度,将可提高系统定位导航精度和可靠性。
2 TDMA数据链系统定位导航
系统中的各个成员接收其他成员播发的P消息(参与者精确定位与识别消息)带的位置信息,结合信号到达时间(TOA),以确定自己的地理位置。
系统的时间同步和TOA测量是实现定位导航的基础之一。用户根据源的位置数据和测出的距离,采用基于多个源的多边定位方法,测量出用户在空间中的位置。然而,在TDMA工作情况下,各源按一定时间顺序轮流辐射,并且源和用户都在运动,不可能在同一时刻测出到三个源的距离,如图1所示。
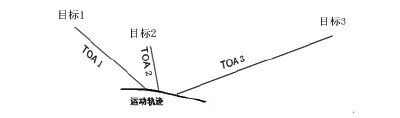
图1 TDMA系统TOA测量
因此,利用经典的导航定位方法不可能得到准确的位置数据。数据链系统的导航功能须将TOA测量与惯性导航系统相组合,用TOA不断校正惯导的误差,以提供高精度位置、速度、航向姿态角和时间信息,并保留较强抗干扰能力。
3 组合定位导航处理器设计
组合定位导航处理器由多个功能模块组成,总体结构框图如图2所示。
导航处理器是通过滤波器解算出用户的时、空状态(用户的位置、时间等),其核心部分在于滤波器的设计。滤波器利用实时更新的TOA、RTT和P消息中源的状态数据还有INS的数据,循环进行滤波计算,不断输出用户的实时状态滤波估计值和滤波误差协方差矩阵,并将滤波定位结果外推到相应时刻,得到用于播发或滤波的用户外推状态。
卡尔曼滤波是一种递推、线性的最优估计,用户用自己的估算位置坐标(Xu,Yu,Zu)和钟差估计值以及接收到的任一源报告的位置坐标(Xs,Ys,Zs),求出两者之间的计算伪距。同时,根据测定的这一源信号的到达时间,求出用户到源间的测量伪距,而是由估算位置确定出来的,二者之差代表了用户估算位置与真实位置的偏差,用此差值对估算的用户位置坐标进行修正,得到滤波估计值;按照用户运动规律外推到下一滤波时刻,再次测量,再次修正,…,经过多次测量,逐步修正,就可得到精度较高的用户实时位置。

图2 导航处理器软件的总体结构
滤波状态量主要由与惯导相关的用户位置误差、速度误差、姿态角误差,以及时钟的频差、相对位置误差、相对速度误差。滤波观测量主要包括伪距测量和RTT测量。根据滤波中的两个观测量相互独立性,以及定位空间要求两方面考虑,进一步将成员滤波器分解为有源校时RTT滤波器和地理滤波器2个滤波器,以提高滤波定位解算速度。
为兼顾工程实现难度和保证长时间工作条件下的滤波精度,对经度误差、纬度误差、成员钟差、相对位置误差等主要状态量采用误差累加闭环校正,将误差估值累加,抵消校正INS和数据链的输出数据,可以保证滤波模型的准确性和滤波精度,同时保证各子系统工作稳定,如图3所示。

图3 采用误差累加校正的组合导航系统闭环校正原理
4 系统性能测试
引起系统定位的主要误差源有INS误差模型、设备延迟、时钟同步、位置基准源、电波传播、多径等,其中部分误差源是系统固有误差。在实验室条件下,以3台实装设备进行系统性能测试,主要需进行基于特定环境的INS测量数据和设备P消息模拟。
INS测量数据由理论值和INS误差量两部分构成。理论值由惯导物理运动方程直接得到的数据。INS误差量主要考虑由陀螺漂移和加速度零偏所引起的误差,其它方面引起的导航误差统一归入系统噪声。INS误差量初始值模拟为均值为0、方差为σ2的高斯噪声,并在滤波过程中按惯导误差传播方程更新,其1σ值见表1。

表1 INS初始误差参数
表2为测试结果。可以看出,INS积累误差的变大对滤波输出结果有影响。但是随着导航滤波器的收敛,滤波输出结果仍能保持较好。

表2 组合导航处理滤波结果
5 结语
本文提出的数据链与INS构成组合导航处理器设计方法,经工程化设备验证测试满足设计要求,使系统获得了数据更新率较高的多维精确导航信息。
[1]梅文化,蔡善法.JTIDS/LINK16数据链[M].国防工业出版社,2007.
[2]刘凯,刘慧.GPS/INS组合制导技术在现代战争中的应用及发展趋势[J].全球定位系统,2005.
[3]秦永元,张洪钺.卡尔曼滤波及组合导航原理.[B].西北工业大学出版社,1998.