自适应组合偏置推力分配算法*
2016-08-29徐海祥
徐海祥 文 武 冯 辉
(高性能船舶技术教育部重点实验室1) 武汉 430063) (武汉理工大学交通学院2) 武汉 430063)
自适应组合偏置推力分配算法*
徐海祥1,2)文武2)冯辉1)
(高性能船舶技术教育部重点实验室1)武汉430063)(武汉理工大学交通学院2)武汉430063)
针对动力定位船舶处于控制力要求为零、环境力较小而方向频繁变化,以及要求高于定位能力实际所需功耗等特殊工况时,提出了一种新的自适应组合偏置策略来解决推力分配的问题.该算法能够在不影响推进系统最大能力的基础上,通过自适应调整偏置量避免全回转推进器发出零推力,保证推进器的角度变化平稳,降低推进器的磨损,提高船舶对环境变化的响应能力.仿真结果表明,该算法能有效地解决上述特殊工况下的推力分配问题.
动力定位;推力分配;特殊工况;组合偏置
0 引 言
动力定位推力分配系统的主要任务是根据控制力的需要给各推进器发出合适的推力和方位角指令以抵抗外界载荷的干扰,使得船舶达到预定位置.推力分配问题本质上是一个非线性最优化问题,目前已发展了多种求解推力优化分配问题的算法[1-4].
在实际定位过程中,可能需要控制力为零,而为了时刻保证船舶的操纵性,不允许推进器停止转动;当环境力较小而方向变化频繁时,推进器的方位角也需要频繁的大角度变化来满足推力需求,从而影响船舶定位的精度,以及定位过程中船舶的操纵性能,同时也会加快螺旋桨磨损.此外,当功率管理系统要求推进系统发出的功耗高于实际所需的功率时,也需要推进器发出额外的推力作为功率储备,而且不能影响定位的效果.针对上述问题,Kongsberg[5]提出了偏置的概念,通过对推进器进行分组,允许全回转推进器之间或组与组之间相互抵消推力.Veksler[6]介绍了通过组合偏置策略来避免由于负载的剧烈变化而导致动力系统功率的阶跃变化.国内学者郭峰[7]用偏置算法解决特殊海况下的推力分配问题,但是未说明如何确定偏置量的大小.施小成等[8]针对组合偏置算法提出了一种组合偏置策略,但是该方法在环境力较小时,由于偏置量的固定不变会导致能量的浪费.
为了解决现有偏置算法在环境力较小时,由于偏置量不能自适应变化而导致能量浪费的问题,本文以一艘动力定位船舶模型为研究对象,基于能量最优的原则,提出一种新的自适应组合偏置算法,该算法能够自适应地调整偏置量的大小,以适应不同的工况,并保证推进系统的最大能力不受影响.
1 三自由度下推力分配数学模型
1.1目标函数和约束条件
动力定位船舶工作要求不同,其优化目标函数的选取也不同.本文以船舶的能耗最小和推力偏差最小为目标,则目标函数可以表示为
(1)
式中:n为推进器的个数;Ti为第i个推进器的推力大小;s为松弛变量;Q为权值矩阵.
考虑推进器的物理限制,主要包括各推进器的最大推力限制、推力变化率限制,以及全回转推进器角度变化率限制,则约束条件可表示为
(2)
式中:τ=(τX,τY,τN)∈R3为控制器发出的合力及合力矩指令;α=[α1,α2,…,αn]T为各推进器的推力方位角;Tmin和Tmax分别为全回转推进器推力的最小限制和最大限制;ΔTmin和ΔTmax分别为推力变化率的最小限制和最大限制;Δαmin和Δαmax分别为角度变化率的最小限制和最大限制;B(α)为推进器的配置矩阵,可表示为
(3)
式中:( lxi,lyi)为第i个推进器的位置坐标.
1.2基于扩展推力的优化分配
为了避免复杂的非线性问题,Sørdalen引入了扩展推力概念,将全回转推进器的推力分解为X方向和Y方向的2个正交力,则推进器的配置矩阵可以表示为
(4)
则推力分配方程表示为
(5)
式中:Te=[T1,x,T1,y,…,Tn,x,,Tn,y]表示各推进器在X方向和Y方向的推力.
以推力的最小平方为目标函数和推力分配方程为约束条件构造拉格朗日函数:
(6)
式中:λ为拉格朗日乘子向量;W为各推力的权值系数,应用拉格朗乘子法可以得到该优化问题的广义逆解.
(7)
推进器的最优角度和推力大小可表示为
(8)
2 自适应组合偏置算法
组合偏置是指对全回转推进器进行分组,通过推力优化算法计算得到各推进器的最优推力,然后给组内的推进器施加额外的推力,即允许全回转推进器之间或组与组之间相互抵消推力,各个组可以包含2~3个推进器,其中推力相互抵消的量称为偏置量Δ,增加的偏置量必需满足:B(α)Δ=0.
自适应组合偏置算法可以有效地解决推进器无法输出零推力的问题,减小全回转推进器的角度变化幅度,提高船舶的动态性能,而且可以将抵消的偏置量作为功率储备来满足高于实际定位需求的能耗,同时避免动力系统功率的阶跃变化.此外,该算法还可以通过自适应调整偏置量的大小来保证整个推进系统的最大能力不受影响.
2.1自适应偏置量的确定
考虑动力定位船舶2个相邻推进器所构成的组合,其推进器布置见图1,2个推进器的最大推力分别为Tmax1和Tmax2,f1和f2分别表示1号推进器和2号推进器由推力优化算法计算得到的推力,T1和T2分别表示1号推进器和2号推进器偏置后的推力.

图1 推进器布置图
文献[8]提出的一种自适应偏置量设计方法,其偏置量可由下式确定.
(9)
式中:μ为固定偏置量的系数.为了提高算法的鲁棒性和自适应性,其引入了自适应偏置因子σ.
(10)
式中:k为相应的采样周期;β1和β2为阈值,且有0≤β1<β2≤1.
则自适应偏置量可以表示为:
(11)
上述自适应偏置算法在推力满足β1≤Tk/Tmax≤β2时,能够实现偏置量的自适应变化,但是当动力定位船舶作业于环境力较小的海况,通过推力优化算法计算得到的推力满足Tk/Tmax≤β1时,采用上述自适应偏置算法得到的偏置量是固定不变的,将导致引入的偏置量过大而造成能量的浪费.
针对上述自适应组合偏置算法存在的问题,本文提出了一种新的自适应组合偏置算法,其偏置量主要是由两部分组成的,一部分是固定的偏置量Δ1,另外一部分是随推力而实时变化的偏置量Δ2,其中固定偏置量Δ1可由式(9)确定.
为了根据推力的变化实时调整偏置量的大小引入角系数ε(0<ε<1),它表示在满足推力需求时角度相对于推力的优先权.角系数越大,则满足相同推力变化的情况下,推进器所需改变的角度越小.在定位作业中,操纵人员可以根据调整角系数的大小来适应不同海况和工况的需求.此外,为了保证推进系统的最大能力不受影响,引入旋转系数δ(0<δ<1),它是决定一个推进系统何时取消偏置以保证船舶的最大能力不受影响.随推力变化的偏置量Δ2可表示为
(12)
式中:α为推进器的方位角.则在第k个采样周期时的自适应偏置量可表示为
以图1中的船舶模型为对象进行仿真分析,假定Tmax1=Tmax2=10 N,为了更好的反映角系数对偏置量的影响,取固定偏置量Δ1=0,旋转系数δ=0.8,分别取角系数ε=0.3,0.5,0.7,0.9.由图2~3可知,在相同角系数时,偏置量随着推力的增加而先增大后减小,从而可以解决了在环境力较小的情况下偏置量过大的问题.当增加的偏置量使得推力与最大推力的比值大于δ时,则通过取消偏置以保证推进器的最大能力.此外,随着角系数的增加,在相同推力的情况下,额外增加的偏置量也越大,因此在实际工程中可以通过选择合适的角系数来满足不同工况下的定位要求.
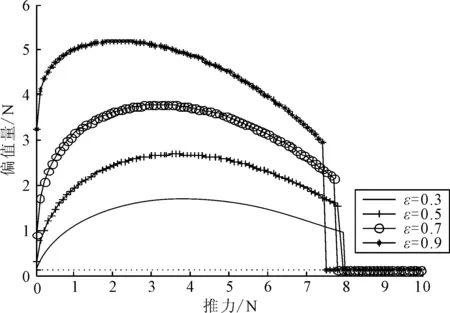
图2 偏置量随角系数变化

图3 偏置后推力随角系数变化
偏置组内由于各推进器推力不同,其偏置量也会不同,因此需要选择一个合适的偏置量,使偏置后组内推进器推力都能满足Tmin≤T≤δTmax,若组内由各推进器的推力计算得到的偏置量都能够满足上述限制条件,应该基于能耗最小原则,选择满足条件的最小偏置量.
2.2自适应组合偏置推力分配算法流程
对于装备有全回转推进器DP船舶,加入偏置算法后的流程为:(1)采用基于扩展推力的伪逆法求解能量最优的推力分配问题,得到各推进器的推力和角度;(2)将全回转推进器分成不同等级的组;(3)根据实际情况,选择合适的角系数,确定增加的偏置量;(4)根据自适应组合偏置算法计算偏置后各推进器的角度和推力的大小.自适应组合偏置算法的流程图见图4:
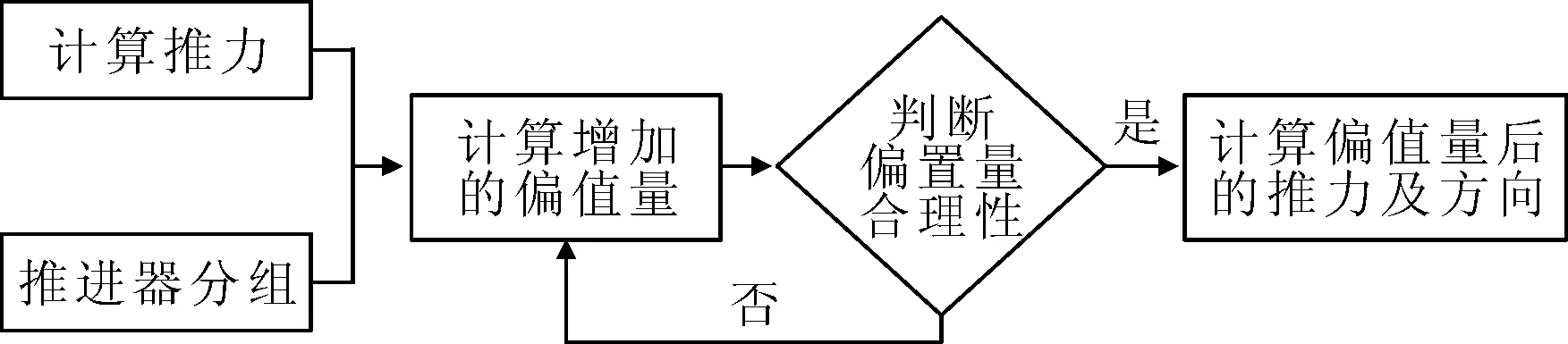
图4 自适应组合偏置算法流程图
3 仿真结果与分析
为了验证本文提出的自适应组合偏置推力分配算法的有效性,并与未采用偏置算法时和文献[8]提出的组合偏置算法对比,以一艘动力定位船舶模型为对象进行仿真分析,该船的推进器的布置见图5,其中1号,2号,3号,4号为全回转推进器,5号和6号为可正反转的槽道推进器.推进器的相关的技术参数见表1.

图5 推进器布置图

表1 推进器技术参数
仿真中假定船舶处于环境力较小而方向频繁变化的海洋环境中作业,待分配控制力和力矩见图6.将推进器1和推进器2组成推进器组A,推进器3和推进器4组成推进器组B,并对其进行组内偏置,然后将A组和B组之间设置组间偏置.仿真中,文献[8]偏置算法的相关参数分别取为:u=0.3,β1=0.5,β2=0.8.本文推荐方法得相关参数分别取为:u=0.05,ε=0.7,δ=0.8.
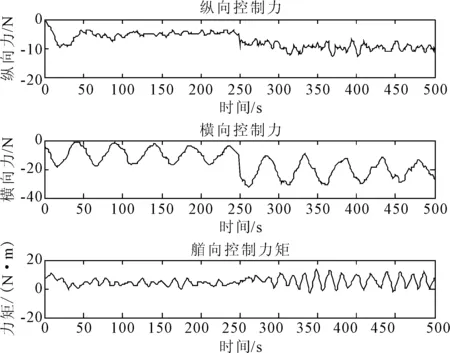
图6 待分配的控制力和力矩
图7表示1号推进器的推力大小和方位角的变化,图8表示2号推进器的推力大小和方位角的变化,图9表示推进系统的能耗变化.由图7~8可知,采用伪逆推力分配算法计算得到的推进器方位角变化幅度较大,而采用两种偏置算法后,1号推进器和2号推进器的角度变化都分别都在45°~55°和-65°~-45°之间,各推进器方位角变化幅度相对于偏置前都减小,从而可以降低推进器的磨损,并且避免推进器排出尾流之间的相互干扰.由图9可知,在推进器角度变化幅度相近的情况下,本文提出的自适应偏置算法与文献[8]提出的偏置算法相比,偏置后推进系统的能耗会大幅度降低.这是因为在外环境力较小的海况下,由于要求发出的推力较小,文献[8]提出的组合偏置算法计算得到的偏置量是固定值,导致引入的偏置量过大而增加了推进系统的能耗.此外,当控制器要求发出的合力为零时,由于偏置量的存在,可以有效的避免全回转推进器发出零推力,提高船舶的动态响应能力.
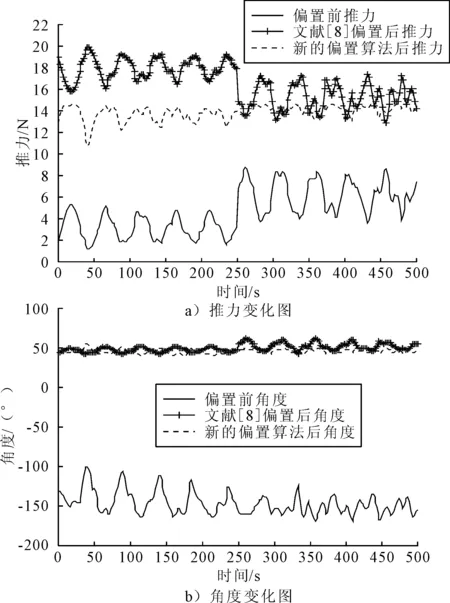
图7 3种算法下1号推进器推力和角度的变化
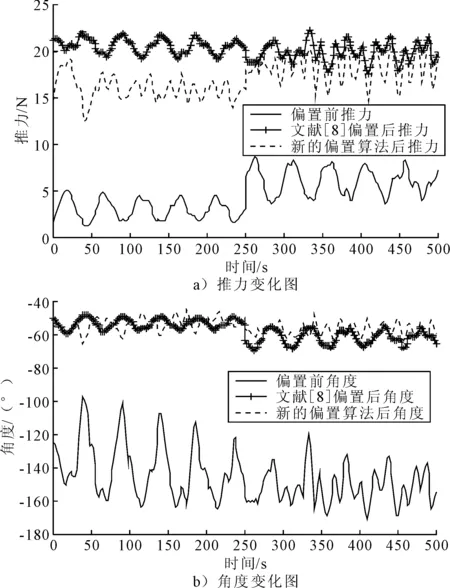
图8 3种算法下2号推进器推力和角度的变化
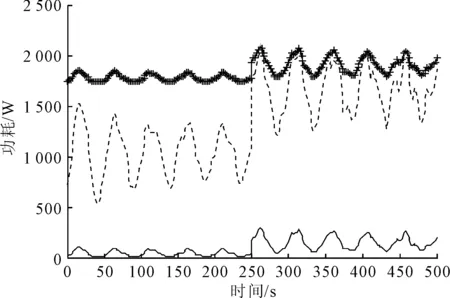
图9 3种算法推进系统能耗的变化
4 结 束 语
文中以一艘动力定位船舶为仿真对象,针对在特殊海况和工况下存在的推力分配问题,设计了一种新的自适应组合的偏置策略,并分析了角系数对偏置量大小的影响规律.仿真结果表明该算法能够通过自适应调整偏置的大小,有效降低了组合偏置算法后推进系统的能耗,降低推进器的磨损,避免推进器之间的干扰,提高船舶的动态响应能力.
[1]FOSSEN T I, JOHANSEN T A. A survey of control allocation methods for ships and underwater vehicles[C]. 14th IEEE Mediterranean Conference on Control and Automation, Ancona,2006:1-6.
[2]王芳.驱动水面航行器的控制分配技术研究[D].哈尔滨:哈尔滨工程大学,2012.
[3]ZHOU X, XU H X. Optimal constrained thrust allocation for ship dynamic positioning system under changeable environments[C]. The Twenty-fifth International Offshore and Polar Engineering Conference,2015:275-282.
[4]MARTIN R. Fuel optimal thrust allocation in dynamic positioning[D]. Norway:Norwegian University of Science and Technology,2013.
[5]KONGSBERG M. Product description-kongsberg k-pos dp dynamic positioning system[M]. Nautic Expo,2006.
[6]VEKSLER A, JOHANSEN T A. Thrust allocation with power management functionality on dynamically positioned vessels[C].2012 American Control Conference,2012:1469-1475.
[7]郭峰.铺管起重船动力定位系统推力分配方法研究[D].哈尔滨:哈尔滨工程大学,2011.
[8]施小成,魏玉石,宁继鹏,等.基于能量最优的组合偏置推力分配算法研究[J].中国造船,2012,53(2):96-103.
Adaptive Group Biasing Thrust Allocation Algorithm
XU Haixiang1,2)WEN Wu2)FENG Hui1)
(KeyLaboratoryofHighPerformanceShipTechnologyofMinistryofEducation,Wuhan430063,China)1)(SchoolofTransportation,WuhanUniversityofTechnology,Wuhan430063,China)2)
In order to solve the problem of thrust allocation when dynamic positioning vessels work in special conditions, such as small environment forces with frequent changes of direction, control force demand being zero and higher power consumption than that of the positioning capacity, a new adaptive group biasing strategy is proposed in this paper. On the basis of without affecting the maximum capacity of the propulsion system, this algorithm can avoid propeller giving zero force, make the angle of thruster change smoothly, reduce the wear of propellers, and improve the response ability of the vessels towards the environment variation, through adjusting the biasing adaptively. The simulation results show that the algorithm can effectively solve the thrust allocation problem in special conditions.
dynamic positioning; thrust allocation; special conditions; group biasing
2016-04-28
U664.82
10.3963/j.issn.2095-3844.2016.04.001
徐海祥(1975- ):男,博士,教授,博士生导师,主要研究领域为船舶动力定位系统开发
*国家自然科学基金项目资助(61301279,51479158)
