异步电机矢量控制技术在电动汽车驱动系统中的应用
2016-08-27朱修敏兰森林
朱修敏,兰森林,马 黎,魏 力
(西华大学 电气与电子信息学院,成都 610039)
异步电机矢量控制技术在电动汽车驱动系统中的应用
朱修敏,兰森林,马黎,魏力
(西华大学 电气与电子信息学院,成都 610039)
针对电动汽车快速发展的现状,研究了电机驱动及其控制技术在电动汽车中的应用,并介绍了异步电机矢量控制理论及空间电压矢量脉宽调制(SVPWM)原理,推导了异步电机在两相静止坐标系和同步旋转坐标系下的数学模型。在Matlab/Simulink下建立了基于SVPWM的异步电机矢量控制仿真模型,进行了仿真实验。结果表明,异步电机定子电流、转矩波动小,转速响应较快,系统具有良好的静态、动态性能,可为实际电动汽车电机驱动控制系统的设计提供理论支撑。
电动汽车驱动;异步电机;矢量控制;SVPWM调制
电机驱动及控制技术是电动汽车的核心,需要满足启动转矩大、调速范围广和过载能力强等基本要求。因此,随着电动汽车的快速发展,蓄电池充放电控制技术、能量管理技术和电机驱动及其控制技术已逐渐成为当今研究的热点[1-5]。交流异步电机因具有坚固耐用、维护方便、可靠性高、容量大、调速范围宽和价格低廉等优点,在现代交流传动系统和电动汽车驱动系统中得到了广泛应用。然而,由于异步电机是一个多变量、强耦合、参数时变的非线性对象,很难对其进行高性能的控制[6]。
1972年,F.Blaschke提出了异步电机转子磁场定向矢量控制的策略,基本思想是把交流电机模拟成直流电机进行控制,把磁链矢量的方向作为坐标轴的基本方向,采用矢量变换的方法实现交流电机的转速和磁链控制的完全解耦,得到类似于直流电机的优良动态调速性能,可使异步电机调速系统具有更高的调速精度、更大的调速范围和更快的响应速度[7]。异步电机矢量控制系统设计的核心包括磁链观测器和控制器的设计。磁链观测设计的准确度能直接影响磁链与转矩的解耦控制;控制器的性能可决定系统的动态响应速度[8]。同时,采用SVPWM调制技术,还能达到转矩脉动小、谐波成分少、直流母线电压利用率高的效果。基于此,本文以MATLAB/Simulink环境作为建模和仿真平台,搭建了异步电机变频调速系统的仿真模型,介绍了控制系统的参数设置,详细分析了矢量控制系统的结构和原理。
1 电动汽车驱动系统的组成
目前,电动汽车驱动系统普遍使用的系统结构如图1所示。蓄电池的电压通过双向Buck-Boost变换器升高,为驱动电机提供能量。通过对逆变器变频控制实现对异步电机的精确控制,从而驱动电动汽车。

图1 电动汽车驱动系统结构图
2 异步电机数学模型
2.1两相静止坐标系下数学模型
异步电机的数学模型由电压方程、磁链方程、转矩方程和运动方程组成[9-10]。一般情况下,电力拖动系统的运动方程为
由运动方程可知,当负载转矩不变时,通过控制电磁转矩就可以控制电机的速度变化。
异步电机的电压方程为
(1)
式中:定子电压usαβ=[usαusβ]T,转子电压urαβ=[urαurβ]T,定子电流isαβ=[isαisβ]T,转子电流irαβ=[irαirβ]T,定子磁链ψsαβ=[ψsαψsβ]T,转子磁链ψrαβ=[ψrαψrβ]T,它们均为各物理量在αβ两相静止坐标系下的分量组成的向量,p和ωr分别为微分算子和电机转子角频率。则矩阵J满足下式:
式中:磁链的导数相常称为变压器电动势,而-ωrJψrsβ项称为旋转电动势。
异步电机的磁链方程可以表示为
式中:Ls、Lm和Lr分别为定子自感、定子转子间的互感和转子自感;矩阵I为二阶单位矩阵。

异步电机的转矩方程为
由于此处采用了等幅值的坐标变换,因此转矩方程中出现了3/2项,若采用等功率变换,则无此项。实际上,根据磁链方程,可以选择不同行变量构成电磁转矩的各种表达式。例如,转矩可以用定子电流和转子磁链表示为
2.2两相旋转坐标系下的数学模型
两相坐标系可以是静止的,也可以是旋转的。若能够得到以任意速度旋转坐标系下的数学模型,则可以涵盖各种坐标系的情况。设两相旋转坐标系的M轴相对于三相静止坐标系a轴的角速度为ωMT,则可以推导出异步电机在MT坐标系下的电压方程为
其中矩阵A为
转矩方程与运动方程分别为
3 转子磁场定向矢量控制
3.1转子磁场定向矢量控制的原理
磁场定向是异步电机的矢量控制的关键,通常包括定子磁链、转子磁链和气隙磁链定向。矢量控制根据磁场位置检测方式的不同,又可以分为直接磁场定向和间接磁场定向两种方式。直接磁场定向方法简单,但容易受电机定子、转子齿槽的影响,检测信号脉动较大。而间接磁场定向不需要观测转子磁链矢量的实际位置,是通过控制转差频率来实现定向。
在MT坐标系下M和T轴是相互垂直且以一定的角速度ωe旋转,同时以旋转磁场轴M作为特定的同步旋转坐标轴,按照转子的全磁链矢量ψr来定向,即转子磁场定向。定子电流和转子磁场定向如图2所示。

图2 定子电流和转子磁场定向
由于M轴取向于全磁链矢量ψr轴,T轴垂直于M轴,从而使ψr在T轴上的分量为0,此时,ψr唯一由M轴绕组中电流所产生,因此可知定子电流矢量is在M轴上的分量isM是纯励磁电流分量,在T轴上的分量isT是纯转矩电流分量。由同步旋转下转子磁链方程可得,ψr在M-T轴系上的分量可用方程表示为
(2)
通过式(2)可进一步得出
(3)
(4)
式中:ωr为转子磁链旋转速度;ωsl为转差角频率,且有
转子磁链由M轴定子电流控制,因此isM又称为定子电流励磁分量或励磁电流。转子磁链与励磁电流之间的传递函数为一阶惯性环节,其时间常数为转子时间常数Tr=Lr/Rr。当励磁电流突变时,转子磁链的变化要受到励磁惯性的阻挠,这与直流电动机励磁绕组的惯性是一致的。稳态时有
ψrd=LmisM
将式(4)作进一步处理可得转子磁场定向下转矩为
转子磁场定向矢量控制的关键是要得到转子磁链矢量的幅值和位置,从而可以实现异步电机电磁转矩的解耦控制,其控制框图如图3所示。

图3 异步电机矢量控制系统框图

3.2任意两相旋转坐标系MT上转子磁链的电流模型
两相旋转坐标系上转子磁链的电流模型如图4所示。
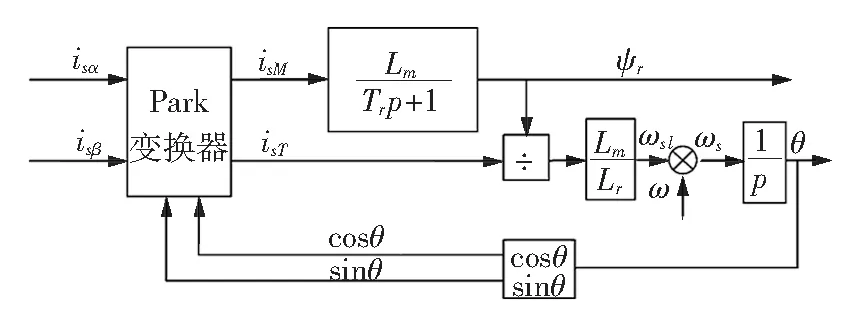
图4 两相旋转坐标系上转子磁链的电流模型
由图4可知,定子三相电流isa、isb、isc经Clark变换可得MT坐标系上的电流isM和isT,再借助式(3)、(4)可得ωsl和ψr,将ωsl和ψr加上实测转速ω,可得定子频率信号ωs,再将ωs进行积分运算可得转子磁链相位角θ。该计算模型具有较高的计算准确度,且适合计算机的实时计算。
4 仿真分析
整个系统的仿真模型主要包括速度控制器、电流控制器、IGBT逆变器、异步电机和反馈电路。其参数如下:额定相电压220 V、额定频率为50 Hz,定子电阻为0.087 Ω、定子漏感为0.8×10-3H,转子电阻为0.228 Ω,转子漏感为0.8×10-3H、励磁电感为34.7×10-3H、转动惯量为0.862、极对数为2。
为了验证仿真模型的有效性,进行了如下仿真实验:电机在负载转矩TL=300 N·m启动,给定转速为n*=500 r/min;当t=1.5 s时,转速达到1000 r/min;当t=2 s时,加负载转矩TL=500 N·m。仿真结果如图5~8所示。

图5 A相定子电流仿真波形

图6 转速响应波形

图7 转矩响应波形

图8 转子磁链幅值波形
从图5~8可以看出,电机的转速能够快速到达稳定,1 s转速指令增大后,电机仍然以恒转矩方式加速,直至达到新的转速值。2 s后负载转矩由300 Nm变为500 Nm,响应速度较快,且转矩的波动幅值较小,具有良好的动态性能。
5 结 语
本文介绍了典型的电动汽车驱动系统的组成及工作原理,重点分析了异步电机矢量控制技术在电动汽车驱动系统中的应用,建立了矢量控制的数学模型,设计了控制系统结构图。利用Matlab/Simulink工具箱,搭建了异步电机直接矢量控制系统的仿真模型,并进行仿真实验。其结果验证了该控制模型具有良好的静态、动态性能。
[1] JUNG D Y,KIM Y H, SUN W K, et al.Development of ultra-capacitor modules for 42 V automotive electrical systems [J].Journal of Power Sources,2003,114(2):366-373.
[2] 汪殿龙,王军,胡云岩,等.燃料电池车用大功率 DC-DC 变换器复合输入输出特性控制系统[J].中国电机工程学报,2009,29(18):60-64.
WANG Dianlong, WANG Jun, HU Yunyan, et al. Compound input and output feature control system of high power DC-DC converter for fuel cell electric vehicles[J]. Proceedings of the CSEE, 2009,29(18):60-64.
[3] 孔亮. 电动汽车电机驱动系统关键技术[J]. 现代物理知识, 2013(2):31-35.
KONG Liang. Key technology of electric vehicle motor drive system[J]. Modern Physics, 2013(2):31-35.
[4] 夏长亮,方红伟. 永磁无刷直流电机及其控制[J]. 电工技术学报, 2012,27(3):25-34.XIA Changliang, FANG Hongwei. Permanentmagnet brushless DC motor and its control[J]. Transactions of China Electrotechnical Society, 2012,27(3):25-34.
[5] HE Y, LIU X T,CHENBIN ZHANG C B,et al. A new model for state of charge (SOC) estimation for high-power Li-ion batteries[J]. Applied Energy, 2013,101(1):808-814.
[6] 李华德,白晶,李志民,等.交流调速控制系统[M].北京:电子工业出版社,2003.LI Huade, BAI Jing, LI Zhimin, et al. Adjustable speed drive syst-em[M]. Beijing: Publishing House of Electronics Industry, 2003.
[7] 黄开胜,童怀,郑泰胜,等.遗传算法在异步电动机动态模型参数识别中的应用[J].中国电机工程学报,2000,20(8):37-42.
HUANG Kaisheng, TONG Huai, ZHENG Taisheng, et al. Parameter estimation for an induction motor’s dynamic model usi-ng genetic algorithm[J]. Proceedings of the CSEE, 2000,20(8):37-42.
[8] 王成元,夏加宽,孙宜标. 现代电机控制技术[M]. 北京:机械工业出版社,2008.
WANG Chengyuan, XIA Jiakuan, SUN Yibiao. Modern motor control technology[M]. Beijing: China Machine Press, 2008.
[9] 余秋实.异步电机SVPWM的矢量控制系统研[D]. 重庆:重庆大学,2010.
YU Qiushi.Research on the vector control system of asynchronous motor SVPWM[D]. Chongqing: Chongqing University,2010.
[10] 谭斌.基于DSP的异步电机 SVPWM 矢量控制系统研究与实现[D]. 西安:长安大学,2013.
TAN Bin. The research and realization of asynchronous motor with SVPWM vector control system based on DSP[D]. Xi’an: Chang’an University,2013.
[11] 朱智勇,余世明,施金培. 基于模糊PI控制的三相异步电机Simulink建模与仿真[J]. 机电工程, 2012,29(1):53-57.
ZHU Zhiyong, YU Shiming, SHI Jinpei. Modeling and simulation on Simulink for three-phase asynchronous motor based on fuzzy-PI control[J]. Journal of Mechanical & Electrical Engineering, 2012,29(1):53-57.
[12] 翟奎修,张晓,陆敏,等. 异步电机的矢量控制策略[J]. 电子元器件应用, 2011,13(2):49-51.
ZHI Kuixiu, ZHANG Xiao, LU Min, et al. Vector control for asynchronous motor[J]. Electronic Component & Device Applications, 2011,13(2):49-51.
[13] 林贞发,游林儒,庄桂玉,等. 异步电机矢量控制系统仿真与应用[J]. 微电机, 2010,43(4):30-33.
LIN Zhenfa, YOU Linru, ZHUANG Guiyu, et al. Simulation and application of vector control system of induction motor[J]. Micromotors, 2010,43(4):30-33.
Application of asynchronous motor vector control system based on drive system of electric vehicle
ZHU Xiumin, LAN Senlin, MA Li, WEI Li
(School of Electrical Engineering and Electronic Information, Xihua University, Chengdu 610039,China)
Aiming at the rapid development of electric vehicle, the author studied the application of motor drive and its control technology in electric vehicle, introduced the control theory of vector control system and the principle of voltage space vector pulse width modulation, derived the mathematics model of asynchronous motor in static coordinate and rotating coordinate. Vector control system was modeled and simulated with MATLAB/Simulink software. The simulation results show that the fluctuation of stator current and electromagnetic torque are low, with fast speed response. The system, having good static and dynamic performance, can provide theoretical support for the design of electric vehicle drive motor control system.
electric vehicle drive system; asynchronous motor; vector control; SVPWM modulation
2016-01-08;
2016-05-15。
西华大学研究生创新基金(ycjj2016054)。
朱修敏(1990—),男,硕士研究生,主要从事电力电子控制技术方面的研究。
TM343
A
2095-6843(2016)03-0239-04