无人直升机水文监测系统在中小河流水文应急测流的应用方案
2016-08-23陈锐
陈 锐
(南宁市水文水资源局,南宁 530001)
无人直升机水文监测系统在中小河流水文应急测流的应用方案
陈 锐
(南宁市水文水资源局,南宁 530001)
无人直升机水文监测系统是一种崭新的非常规应急测流技术方法,是传统水文监测技术的有利补充。为此,结合广西中小河流特点,对无人直升机应急测流系统在中小河流水文应急测流的应用方案进行了设计,重点介绍了系统的组成、选型、硬软件参数、功能以及技术特点等。
无人直升机;中小河流;水文应急测流
1 概述
1.1 现行测流方法存在的问题及解决方案
(1)随着中小河流水文监测系统等一批重大项目的建设,广西新增的水文(位)站、雨量站点达到历史的突破。截至2014年12月,广西水文系统雨量站在659个国家基本站的基础上增至目前的3 129个(含专用站),水文(位)站在151个国家基本站的基础站增至目前的551个(含专用站),其中流量站由126站增至到目前278个(含专用站),水位站由25站增至到目前273个(含专用站)。而相应的监测人员编制不增加的时候,就需要解决两个问题:一是随着科技的发展,如何将现有的先进测流技术应用到生产实际中去;二是要如何尽可能使得水文测站的水位流量关系单值化,这两者相辅相成;
(2)广西暴雨频发,地质地貌复杂,是洪旱灾害、泥石流山洪灾害多发地区,水文应急监测是必不可少的内容。受水电梯级开发等人类活动的影响,河道和流域下垫面环境发生了较大的变化,使洪水传播和合成机制日趋复杂,河流上、下游水位原有的规律被打破,相关关系越来越差。因此,补充和完善水文测报手段,探索应用新仪器、新技术条件下水文监测技术,尽快建立新条件下水文因素之间的新关系,非常必要;
(3)针对无水文资料的中小河流,利用无人机的优势技术可快速收集各条河流的水面流速。在常规ADCP、流速仪等测流仪器无法入水施测时,或者水文灾害突发事件现场的断面测流作业条件下,采用无人直升机从空中非接触式地测出沿河宽不同起点距的水面流速,并最终换算成全断面的流量,是一种有效的应急水文测流措施。
1.2 广西中小河流水文应急测流的特点和技术措施
1.2.1 流量测验的特点
广西中小河流众多、洪水陡涨陡落、且时常伴有泥石流灾害发生。因此,常规的流量测验方法(如精测法、常测法等)仅仅适用于正常情况下的流量测验。而当特殊情况发生时,如山洪泥石流下来、流速仪、ADCP根本放不下去的情况下;或是开展应急监测的河段没有任何测验设施,如无缆道、上下游河段没有桥梁等,就需要采用非常规的方法进行流量测验。
1.2.2 无人直升机水文监测系统
无人直升机水文监测系统是一种崭新的非常规应急测流技术方法,对有缆道的测验断面,则继续使用流速仪、电波(雷达)流速仪等在这些最合适的位置上进行水面流速观测;对没有缆道、需要使用测船进行流速测验的断面,可以考虑采用无人直升机携带电波(雷达)流速仪进行定点观测的方式。
2 无人直升机应急测流系统方案
2.1 测流方案描述
(1)无人机测流系统主要作为野外应急条件下的自然河道断面水文测流解决方案,现场无需辅助的水文固定设施(见图1);

图1 无人直升机野外工作照片
(2)系统由越野巡测车为机动主体,车载1~2架水文无人直升机,无人直升机地面控制站通讯和计算机设备一体化集成在巡测车中,机上搭载雷达测流仪器、视频监控、通讯、导航和电源设备。无人直升机为可拆卸组装结构,现场需要2人操作,1人控制地面站计算机,进行飞机航迹控制和水文测流作业操作,另1人负责野外现场放飞和回收飞机;
(3)在需要施测的河道断面附近,停车组装无人直升机设备,释放无人直升机完成自动测流任务。飞机按照遥控或设定的航迹穿越河道断面,可以按照设定的5~50m间距点悬停,悬停高度10~30m设置,实施雷达流速仪测量(见图2);

图2 无人直升机野外测流飞越河道横断面工作示意
(4)在水文应急监测条件下,如果由于道路不通人员到不了现场,无人直升机操控人员有可能对现场不通视,系统支持2种工作模式:①遥控飞行模式:由操作员通过地面控制站的监视器屏幕,遥控飞机起飞、降落和视频导航飞行,完成悬停和测流任务;②自动飞行模式:在通视性好的测流断面,操作员通过地面控制站的计算机为无人直升机设置飞行航迹,悬停测流点等参数,无人直升机的起降和航迹控制,均由机载计算机控制实现,机载计算机控制自动完成测流飞行任务;
(5)测流过程:①无人直升机测飞行轨迹、视频图像及悬停点测流数据均通过无线链路传送回地面控制站计算机,数据被实时处理和存储,断面流量由水文测流软件根据断面的表面流速~流量模型关系进行计算,输出;②对于无模型的测流断面,可以显示各测流悬停点表面流速数据和分布情况,定性地评估断面的流量。
2.2 机载测流仪器选型
测流吊舱传感设备采用美国ACI公司S3-SVR型多普勒雷达波测速传感器(见图3)。无人直升机系统提供RS422、RS232等标准接口,通过软件优化与任务载荷吊舱连接,实现与雷达波测流传感吊舱的通讯,将河道断面流速数据通过机载数据链实时的传输到地面站,地面站计算机的应用软件结合GPS信息,通过计算实现对断面流量的集测、计算、输出和管理功能,获得水面流速和断面流量。

图3 S3-SVR型多普勒雷达波测速传感器
S3-SVR型多普勒雷达波测速传感器主要技术指标:
测速技术原理:多普勒频移技术;
流速测量精度:≤±0.03m/s;
流速测量范围:0.2~18m/s;
发射功率:50 mW;
微波频率:Ka波段,34.7 GHz;
波束宽度:12°;
数据接口:RS-232,9 600 bps;
工作温度:-30℃~+70℃;
保存温度:-40℃~+80℃;
设备重量:0.6kg;
设备尺寸:长度120mm,直径70mm;
适用环境:全天候,大、中、小以及暴雨天均可正常测量流速。
3 水文无人直升机测流模型的创建
(1)对广西需要采用无人直升机测流的水文测站已有的水文资料进行数据分析,寻找不同水位条件下的水面流速沿河宽的分布函数(可参考流速沿水深的分布函数为4种:抛物线型、椭圆型、对数型和指数型),然后从中寻找这些分布函数与断面平均流速之间的相关关系最好、最稳定的位置(可能是断面上水面流速沿河宽的分布函数的平均流速,也可能是某几个特定位置的水面流速组合,甚至是某一个特定位置的水面流速),为流量测验找到最合适的测验位置;
(2)根据测站已有的多年实测数据,进行分析比对,从中进行模拟,选取最合适的分布函数,从中找到高洪、丰水、平水和枯水期的4种不同水位下建立测站水面流速沿河宽分布函数、水面流速与断面平均流速相关关系,并且寻找到这样的一种方法,可供广西乃至全国合适的地区推广运用;
(3)对于中小河流没有实测资料(或者实测资料代表性不充分的测站)需要开展上述数据的平行施测工作。
4 水文应急测流软件功能
(1)支持超短波无线数据链通讯功能,满足20km范围内的遥控和视频传输功能;
(2)支持实时测流数据的采集、处理和流量计算;
(3)断面飞行航迹和测流悬停点的位置分布和数据显示;
(4)水文测流报表和过程线的显示。
5 水文常规测流及应急监测无人直升机系统选型
满足非接触雷达测流的无人直升机系统需要具备人工操控、增稳操控和自主飞行控制3种模式,可实现人工/自主起降,精确的位置、高度和速度跟踪控制,任意作业航迹自动规划,多机接力作业,地面实时视频观测,全自动智能控制以及自动记录任务执行情况等功能。无人直升机平台采用汽油发动机、电动舵机、碳纤维尾管/桨叶、齿轮、无人直升机机体、计算机机箱等均采用成熟技术设计制造。
6 无人直升机测流系统组成
结合水文监测任务的特点,水文监测无人直升机系统要求技术成熟,在飞行控制与管理系统、飞机平台、测控指挥链路、任务载荷、地面保障设备等方面均要进行水文应急监测任务的适应性设计与试飞验证。本文介绍由中航工业西安飞行自动控制研究所自行研发制造的AR200无人直升机系统,是拥有完全自主知识产权的通用型民用无人直升机系统,系统主要由地面与空中两部分组成,地面部分包括地面保障运输车(可以兼容普通越野车)与地面站(飞行指挥中心、水文测流计算机),空中部分主要包括飞机平台、飞行管理系统、测控系统、任务载荷系统等部分。系统主要组成如图4所示。
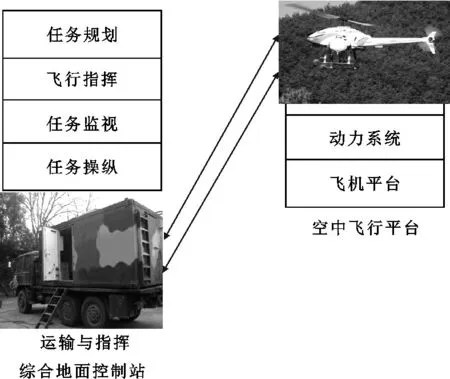
图4 AR200无人直升机系统组成
AR200无人直升机作业系统的组成分为以下3个部分:
(1)飞机平台及任务载荷:包括无人直升机机架、动力部分(含发动机和启动机)、传动部分(齿轮、皮带、离合器等)、起落架、桨叶(大桨和尾桨)、旋翼头、油箱、任务载荷系统等;
(2)机载系统:包括供电电源、遥控接收机和舵机、GNCC及任务一体化计算机、机上天线、电缆等;
(3)地面站系统(集成于地面运输车内)及辅助设备:包括指挥与控制地面站(综合遥控遥测和差分GPS基站功能)、手持遥控器、手持位置测量设备、GPS基站天线、地面数据链天线、以及发电机等相关辅助设备。
AR200无人直升机作业系统构成及拓扑图见图5~8。
7 AR200无人直升机功能与性能
7.1 系统功能
AR200无人直升机系统通用化作业流程见图9。
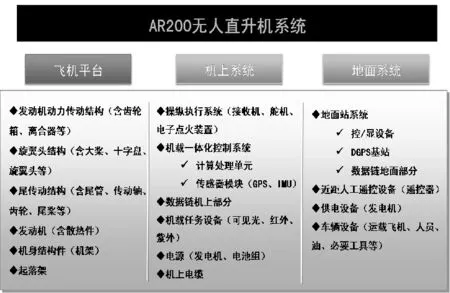
图5 AR200无人直升机作业系统构成

图6 AR200无人直升机作业系统空中部分

图7 AR200无人直升机作业系统地面站控制站部分

图8 AR200无人直升机作业系统拓扑组成
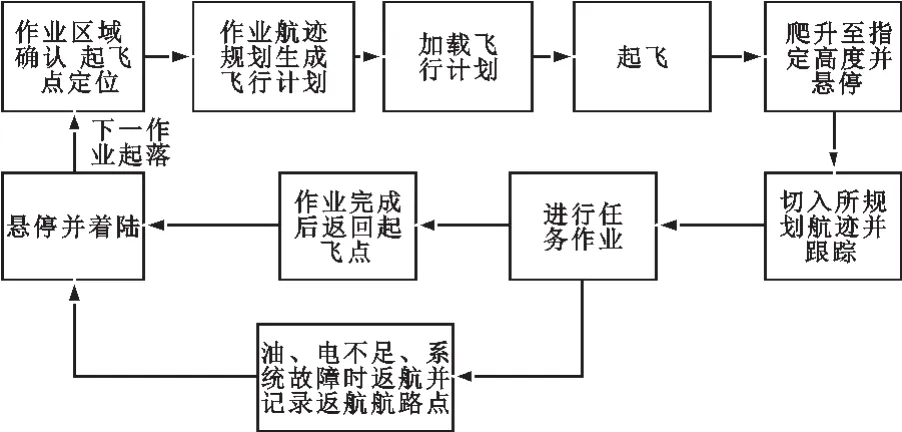
图9 无人直升机任务作业流程
针对中小河流水文测验和应急监测任务,在确定数字地图的条件下,可以实现航线任务实时规划。AR200无人直升机作业系统的主要功能如下:
(1)任意地形作业航迹规划;
(2)人工操纵/增稳控制/自动控制飞行模式切换;
(3)通过操纵手控制遥控器上的开关,实现三者之间的一键切换;
(4)全自动控制作业飞行,无人直升机本体对象不稳定,通过内回路的姿态稳定控制和外回路精确制导逻辑,保证无人直升机可精确稳定跟踪各类控制指令,实现作业过程中无人干预情况下的全自动起飞/着陆、以及航迹的精确跟踪(亚米级),并在作业完成后自动返航、或通过地面站指令实现“一键返航”;
(5)高度通道人工可干预,在地形起伏较大、规划难以补偿(受限于地理信息采集点有限)的情况下,可通过遥控器操纵杆人工干预补偿飞行高度,保证无人直升机的安全飞行,这一功能在峡谷、城市作业时尤为重要;
(6)地面遥测遥控,通过地面站的显示界面,可在起飞前加载飞行任务,在飞行中发送飞行指令并实时监测各种飞参数据,且具有第一人称飞行图像显示功能,具有友好的人机界面;
(7)任务设备控制,系统故障诊断及处理等。包括任务载荷、数据链、GPS、传感器等机载设备故障后的处理模式,以及电、油不足情况下的处理。
7.2 主要性能参数
最大巡航速度:54km/h;
作业巡航速度:36km/h;
最大爬升率:2m/s;
空机重量:27kg;
最大起飞重量:50kg;
最大作业载重:15kg;
飞行时间:≮60min(可加挂副油箱进行扩展);
工作高度:0~1 000m(相对高度);
姿态(俯仰和横滚)保持精度:±1.5°;
航向给定与保持精度:±3.0°;
飞行高度保持精度:±1.5m;
地速保持精度:±1.0m/s;
位置给定与保持精度:±1.0m;
区域导航精度:±1.0m;
起飞、着陆和悬停状态的最大正侧风:5m/s。
尺寸(长×宽×高):2 800mm×780mm×950mm;
主旋翼直径:2 350mm;
发动机排量:170 cc;
发动机马力:17 hp;
计算机尺寸:150mm×125mm×85mm;
一体化飞行控制与管理系统重量:≤2kg(含电缆);
地面指挥与控制站集成于运输车内,运输车可选配改装。
8 AR200无人直升机的技术特点
8.1 飞控与管理系统技术特点
(1)采用小型传感器系统,提高任务可靠性的同时减少了重量;
(2)采用成熟货架电动舵机,提高舵机的寿命;
(3)通过内置飞行参数记录模块,提高调整试飞工作效率;
(4)包含完善的计算机、舵机的自监控措施,保证故障切换的可靠性;
(5)紧急情况之下可采取紧急返航或自转下滑策略,最大限度地保证系统安全性;
(6)软件中采取完善的故障处理措施,提高系统安全性。
8.2 飞行功能模态库
8.2.1 稳定飞行控制系统
结合水文监测任务的飞行环境,稳定飞行控制系统可实现以下8种稳定飞行控制功能:
(1)三轴姿态保持(ATT)。姿态保持是最基本的控制模态,提供无人直升机三轴姿态(俯仰、横滚与航向)保持功能;
(2)速度给定与保持(VEL)——含纵、横向速度遥调功能。速度给定与保持模态可提供保持投入瞬间的速度值的功能。依据飞行速度又分为空速保持、地速保持和悬停保持3种。可通过飞行组合指令的速度给定项来调整速度基准;
(3)航向给定与保持(HDG)——含航向遥调功能。航向给定与保持模态可提供跟踪并保持飞行组合指令给出的航向给定值的功能。由滚转通道和航向通道协调进行控制;
(4)高度给定与保持(ALT)——含高度遥调功能。高度给定与保持模态可提供保持投入瞬间的高度值的功能。依据当前高度又分为气压高度给定与保持和无线电高度给定与保持两种工作方式。可通过飞行组合指令中的高度给定值来调整高度基准;
(5)自动区域导航(NAV)。自动区域导航模态依据预先装订的航路信息及惯性导航系统的飞行状态信息所计算生成航向导引指令控制无人直升机完成沿设定航路的飞行的功能;
(6)位置给定与保持(PH)——含纵、横向位置遥调功能。位置给定与保持模态可提供保持投入瞬间位置的功能。可通过飞行组合指令的纵、横向位置给定项来调整位置基准;
(7)自动向下过渡(TDN)。自动向下过渡模态的功能是使用俯仰及总距通道,使飞机以预先编制的程序退出巡航飞行状态,逐步调整到悬停飞行状态,即调整飞行速度由巡航空速至零地速,同时调整高度至机场航路点上方10m(暂定)的高度。当地速小于1m/s(暂定),且高度达到期望高度后,由制导逻辑确定该模态是否结束,并调用其它模态;
(8)自动向上过渡(TUP)。自动向上过渡模态的功能是使用俯仰及总距通道,使飞机以预先编制的程序退出悬停飞行状态,逐步调整到巡航状态,即调整飞行速度由零地速至巡航空速,同时调整高度至应飞航路点的高度。当空速达到巡航空速,且高度达到期望高度后,由制导逻辑确定该模态是否结束,并调用其它模态。
8.2.2 稳定飞行控制系统
稳定飞行控制系统可实现以下机动轨迹控制功能,各机动轨迹控制功能的作用是提供稳定飞行状态间的过渡飞行状态的飞行控制。
(1)起飞(TAKEOFF)。起飞用以进行直升机起飞过程的控制,达到预定高度后自动转入悬停状态的高度保持;
(2)着陆(LAND)。着陆用以进行直升机着陆过程的控制,到达地面后该机自动结束;
(3)加速(ACC)/减速(DEC)。加速/减速用以进行直升机飞行速度的改变;
(4)爬升(CLI)/下降(DES);
(5)盘旋(CIR)。盘旋用以进行大速度下直升机航向的改变;回转用以进行悬停状态附近的航向改变。
8.3 地面控制与指挥
使用无人直升机面临的一个问题是任务区域的可达性,AR200设计了独立的地面指挥与控制系统,可以实现便携式携带,也可以集成于地面运输车(或越野车)内实现地面设备的集成化,以便于灵活运动。
地面控制站(GCS)是无人直升机测控与信息传输系统的重要组成部分,完成对飞机、任务载荷及数据链的状态监视和操作控制。地面控制站主要实现以下的功能:
(1)飞行器飞行状态和飞行相关设备状态的实时显示和控制;
(2)光电平台等任务设备的控制和数据信息实时显示;
(3)任务/航路显示、规划和管理。
9 结语
无人直升机水文监测系统是一种崭新的非常规应急测流技术方法,无人直升机测流飞行轨迹、视频图像及悬停点测流数据均通过无线链路传送回地面控制站计算机,数据被实时处理和存储,断面流量由水文测流软件根据断面的表面流速~流量模型关系进行计算,输出。对于无模型的测流断面,可以显示各测流悬停点表面流速数据和分布情况,定性地评估断面的流量,有着非常广泛的应用前景。目前,国产的无人直升机技术相当成熟,大多应用于农业、地质、气象、电力、抢险救灾、视频拍摄等行业,但是无人直升机用于水文上测流技术目前全国还没有实践,尚需要做大量测试、率定工作;无人机测流技术的研究是谁先开展了,谁就领先。凡是需要空中解决方案的地方,都将有无人机的一席之地。无人机将应用在更广阔的领域。
(责任编辑:周 群)
Application of hydrological monitoring system equipped with unmanned helicopter in emergency flow measurement of middle and small rivers
CHEN Rui
(Hydrology and Water Resources Bureau of Nanning City,Nanning 530001,China)
As a new unconventional technical method for emergency flow measurement,the hydrological monitor⁃ing system equipped with unmanned helicopter is favorable supplement for traditional hydrometric survey technolo⁃gy.Combined with the characteristics of middle and small rivers in Guangxi,the author presented the scheme for application of emergency hydrological flow measurement system with unmanned helicopter,with emphases put on the composition,selection,parameters of hardware and software,functions and technical features of system.
Unmanned helicopter;middle and small rivers;emergency hydrological flow measurement
TP79;P332.4
B
1003-1510(2016)05-001-06
2016-01-09
陈 锐(1969-),女,广西博白人,南宁市水文水资源局高级工程师,学士,主要从事水文水资源站网管理及水文监测工作。
