SCARA机器人在香肠自动上料机中的应用研究
2016-08-22何文明广州达意隆包装机械股份有限公司
何文明 广州达意隆包装机械股份有限公司
SCARA机器人在香肠自动上料机中的应用研究
何文明广州达意隆包装机械股份有限公司
现在,食品包装中,前段包装由于产品比较规则,易于实现自动化,后段产品不规则,基本上采用人工完成。由于人工包装存在卫生难于控制,而且产量也很难提高,严重影响了整线效率,急需自动化的设备来弥补。
SCARA机器人有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个关节是移动关节,用于完成末端件在垂直于平面的运动。手腕参考点的位置是由两旋转关节的角位移φ1 和φ2,及移动关节的位移z决定的,即p=f(φ1,φ2,z)。这类机器人的结构轻便、响应快,最大运动速度可达10m/s,比一般关节式机器人快数倍。它最适用于平面定位,垂直方向进行装配的作业。例如,快速将一件小物件从一条输送带移动到另一条输送带上并排列好。其串接的两杆结构,类似人的手臂,可以伸进有限空间中作业然后收回,适合于搬动和取放物件。
以香肠自动上料为例,目前,市场上卖的香肠经过灌装机灌好后,送到蒸炉里蒸熟,然后人工将香肠从中间分隔处截断,放入周转框。人工再将香肠一个个放入拉伸膜机下膜的凹槽内。由于香肠的不规则性,很难用常规的设备实现自动上料。传统香肠的上料方式主要是靠人工,人工放一筐肠在拉伸膜机正上方,然后用手一个个将香肠放入拉伸膜机的下膜上。这种上料方式,效率比较低,劳动强度大,而且卫生比较难控制。由于现有的拉伸膜机一直采用人工上料,故上料的位置很小,如果采用并联机器人,就只能安装一台并联机器人,一台并联机器人上料效率仍然较低,无法满足产量需求。由于SCARA机器人体积相对小,采用合理的布局方式,可以布置两台,这样就在有限的空间里满足产量的要求。
为了解决香肠每根不规则都能被机器人准确的抓取到,就必须给机器人装上“眼睛”,即配上视觉系统,通过SCARA机器人配合视觉系统,相当于给机器人装上了眼睛,完全相当于人的功能了,这样就能解决香肠不规则的问题。其方案如下:
1、工作原理
人工将整框的香肠倒入振动理料机构的料斗内,经过振动,香肠均匀地落入振动输送机上,在振动输送机前进的方向均布了5道凹槽,避免香肠滚动,在振动输送的过程中,香肠会逐渐落入凹槽内,香肠的排列方向也将逐步一致,即短边在前的输送。振动输送机分为三段,前一段都比后一段的速度快,这样就可以将前后的香肠拉开距离。前后和左右间距分开的香肠通过90°转弯后落到抓取输送带上,在抓取输送的上方安装有视觉系统,当香肠从视觉系统的镜头下通过时,视觉系统将采集到每条香肠的坐标,然后将数据传递给机器人控制器,机器人控制器负责将抓取任务分配到每个机器人上;在抓取输送带的斜对角安装有两个水平四轴机器人,每个机器人负责抓取输送带上一半的香肠,放到拉伸膜机一半的位置上,两个机器人刚好将抓去输送带上的香肠全部放倒拉伸膜机上。当下膜放满后,拉伸膜机步进一次,机器人重复下一次抓取。实现香肠的全自动上料。
2、组成部件
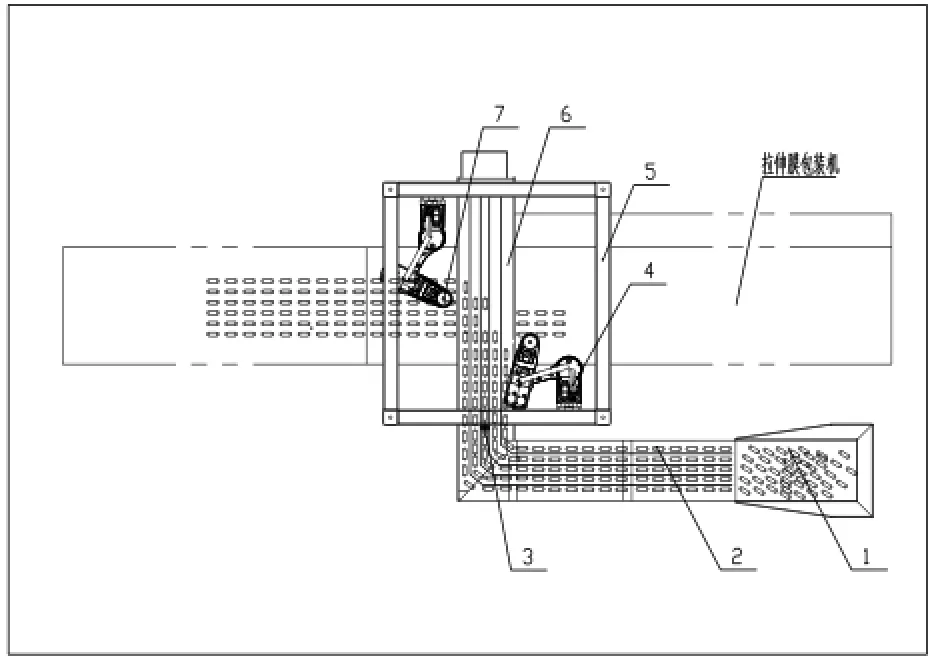
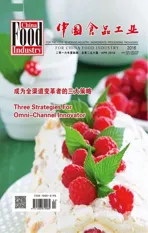
图1 基于视觉系统的SCARA机器人香肠上料系统组成原理图
由于拉伸膜机的产量是180根/分钟,如果采用并联机器人,一台是不能满足产量,需要2台,而现有的拉伸膜机是没有足够的空间安装两台并联机器人,故在抓取输送带的两侧布置了两台SCARA机器人,且两台机器人相对抓取输送带呈斜对角设置。每台机器人负责抓取输送带上靠近各自位置的香肠,互不干涉,实现香肠的全自动上料,大大提高上料效率。
人工将整框的香肠倒入振动料斗1,在此处挤压在一起的香肠会被振松散,然后均匀地落到振动输送机2上,香肠在3段振动输送机的整理下,沿着5个通道排列整齐。落到抓取输送带6上,在6的正上方安装有视觉系统3,视觉系统检测到每根香肠的坐标和外形,在标准香肠偏差值内的香肠的坐标传输到机器人控制器,在标准香肠偏差值以外的香肠将不会被视觉识别,这样还可以剔除掉不合格的香肠。机器人控制器将抓取指令发送给机器人4和机器人夹具7,完成香肠的抓放。
(1)振动理料机构
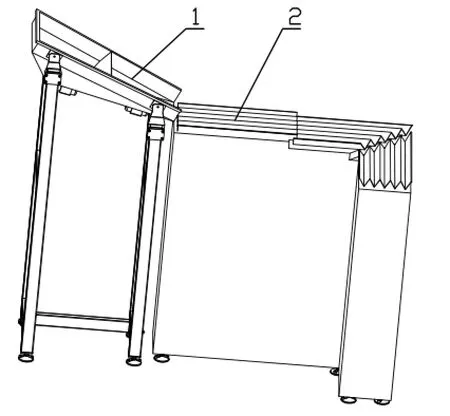
图2 振动理料机构
1.振动料斗2.振动输送机
振动理料机构包括振动料斗和振动输送机,由于香肠是装在周转框内,而且挤压在一起,为了方便上料,需要采用振动料斗将挤压在一起的振松,并均匀的下落到振动输送机上,振动输送机分为三段,每段均布5到凹槽,为了充分利用空间,将第三段振动输送机与第二段振动输送机垂直布置。后一段振动输送机输送速度都比前一段快,而且每一段后端相对于前端都有一个向下的倾角,这样设计有利于香肠的输送。
(2)机器人夹具
图3 机器人夹具
机器人抓取香肠时,为了提高产能,采用3抓1放的方式,即抓3次后放一次,夹具上有3套升降气缸和3套气爪,在抓香肠之前,所有的升降气缸缩回,当抓取第一根香肠时,第一个升降气缸伸出,气爪动作,夹片夹住香肠,然后升降气缸缩回,重复动作抓取第二根和第三根香肠,当抓完第三根香肠后一次性将三根香肠放入拉伸膜机的下膜凹槽内。
在包装机械中,尤其是后段食品包装,有些产品的生产还受到季节的限制,如雪糕、月饼等,每年只在特定的时间生产,采用人工包装,带来生产管理上的麻烦,企业急需自动化的设备取代人工。部分企业基于成本和回报率的考虑,是否采用机器人还在犹豫中。SCARA机器人的低成本,完全可以解决这一问题。多台机器人在同一生产线上的协同工作,整合外围系统,可以打造精简、高效的机器人工作站,呈现更高的灵活性并逐步实现智能生产,达成高效率的自动化,增加生产弹性,提高产能。