四轮独立电动汽车的驱动控制与平顺性*(续2)
2016-08-22刘鑫许鸣珠
刘鑫 许鸣珠
(石家庄铁道大学)

3 最优控制驱动系统
最优控制方法可以利用性能指标进行合理控制,实现快速处理,其能耗小,易于实现状态反馈。文章将系统的电流变化值(ΔI)作为性能指标。利用MATLAB软件提供的系统辨识工具箱,根据已知情况对驱动系统模型进行合理辨识[8],建立反馈调节。关于模型类别,汽车的控制问题对于二阶线性参数模型理论比较成熟,在辨识试验中根据输入输出数据,参考文献[8]可以把驱动系统的动态模型阶次定为二阶,建立数学模型,如式(1)所示。

式中:I——电机驱动系统的输出电流,A;
U——输入给驱动电机的D/A控制量,经过D/A转换为电压值,V;
a,b,c——电机数学模型的相关参数。
最后得到 a=1.365,b=4.439,c=23.33,曲线的拟合率为99.1%,所建立的模型符合电机数学模型的建立要求。
电流的反馈调节需要反馈电机电流的相对变化值,要对前面得到的式(1)进行变换。

式中:ΔI——电机驱动中电流的相对变化值,A;
ΔU——电机驱动中电压的相对变化值,V。
将式(2)变形,列出包括状态变量x的状态方程,则其相关模型为:

式中:A,B——系统方程系数矩阵;
U(t)——输入变量;
x(t)——状态变量。
已给定初始条件 X(t0)=X0,寻找最优控制 U(t),使下面的线性二次型最优控制指标最小。

式中:Q,R——对状态变量和输入向量的加权矩阵;
tf——控制作用的终止时间,s。
如果想要指标最小,那么最优控制为:

对于线性系统,当tf趋向于无穷,P趋向于常数矩阵,得到代数方程Riccati的解。

其中反馈增益矩阵为:

驱动的最优控制为:

式中:K——反馈系数矩阵,也是常数矩阵;
r——参考输入;
P——代数方程Riccati也就是式(6)的常数解,这里利用ΔU建立电压的反馈调节。
在线性二阶系统中,K值由R和Q决定。驱动控制系统要兼顾响应的速度和稳定性,加权矩阵可以减小系统的高速收敛振动范围,对二次型的性能指标有重要影响。R是正常数,为了方便起见,可以将R设置为1,Q是常数加权矩阵,并且Q≥0,Q=QT,最终确定为:
有了Q和R的值,可以利用MATLAB控制箱的lqr()函数,依照给定的加权矩阵设计LQ最优控制器,函数调用格式为:[K,P]=lqr(A,B,Q,R),要代入式(8)作为控制器,最后得到的值为K=[1.498 3 1.005 2],出于计算考虑定为K=[1.5 1][9-10]。
该加权矩阵主要应用于模型反馈调节当中,利用ΔU对电压系统的反馈作用,使电机的电流波动减小,维持在平稳的状态,而电流大小决定电机输出转矩大小,电流维持平稳,转矩输出便可以保持等转矩的分配模式。
4 仿真试验和数据计算
为了验证等转矩分配方法对汽车平顺性能的影响,在随机不平路面上进行3种模式的直线行驶,仿真试验分别为:1)四轮独立驱动方式;2)开环驱动转矩四轮平均分配;3)闭环反馈等转矩分配到每个轮毂。
仿真汽车从起动开始,4个驱动电机分别开始施加转矩,使其起步进入加速阶段,12 s后汽车运行速度达到10 m/s时,加速停止,电机在克服基本阻力矩的情况下,保持匀速行驶状态,维持10 m/s的速度。路面设置为随机不平路面,路面等级为最高级别的H级路面和最低级别的A级路面[11]。
4.1 四轮独立驱动
汽车每个电机各自负责一个轮毂,对力矩不进行调节和分配,这是四轮独立驱动中比较简单的一种方式,在H级路面下直线行驶的数据参数,如图4所示。四轮独立驱动方式的联合仿真模型,如图5所示。

图4 H级路面下四轮独立驱动汽车与电机相关参数
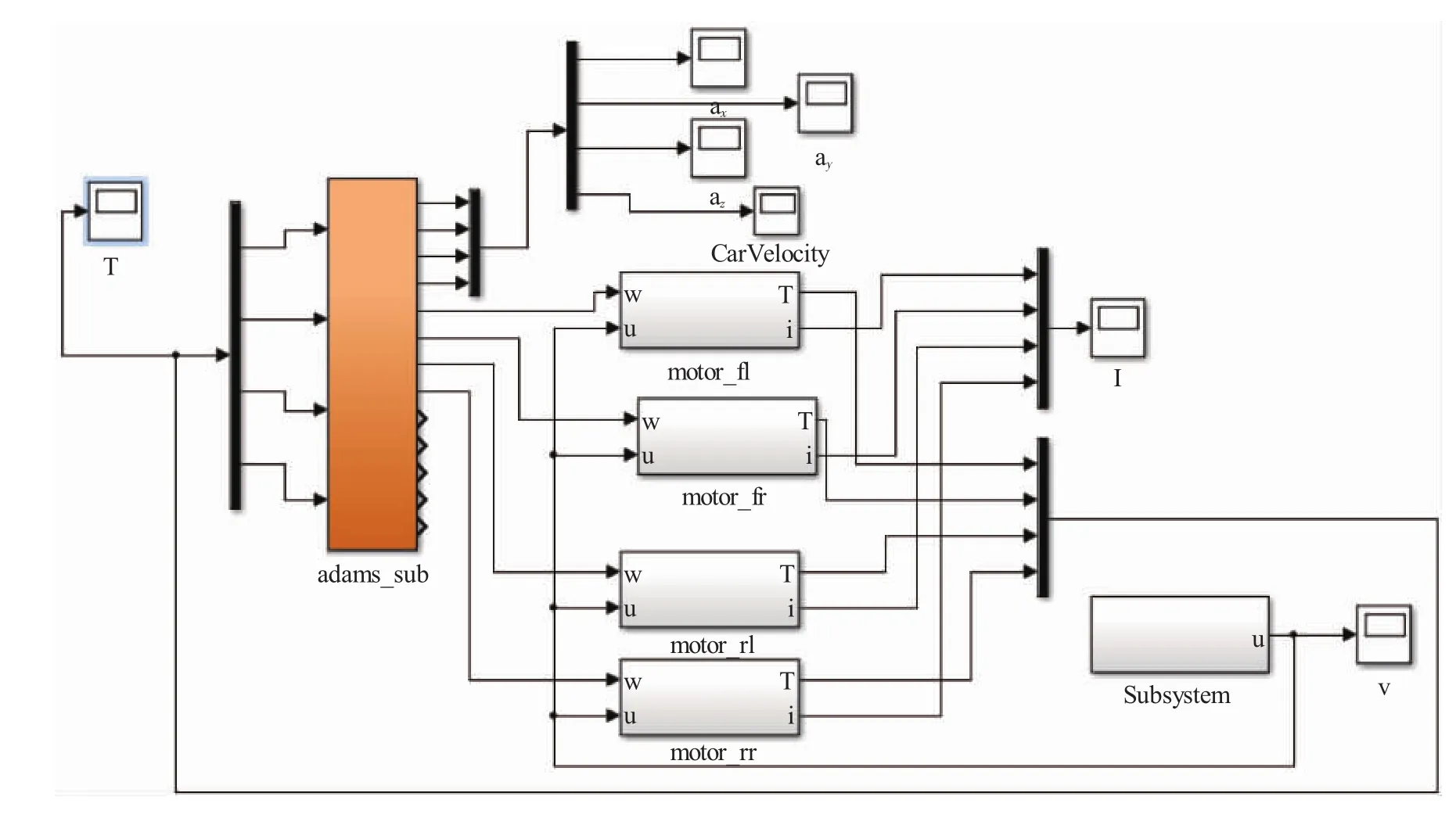
图5 四轮独立驱动方式联合仿真模型
4.2 四轮驱动力矩平均分配
如果换成4个轮毂电机按等转矩的方法进行分配,对4个电机的力矩先求和再平均分配到每个轮毂上,输入的4个力矩是一致的,为力矩求和的1/4,那么电流变化就得到了改善,对力矩平均分配却不使用控制策略的相关参数曲线变化,如图6所示。速度上升曲线与独立驱动的模式基本一致,如图6a和图4a所示,输入车轮轮毂的力矩为4个电机力矩相加求和的1/4,电机电流情况,如图6b所示,但波动变化不如图4b那样激烈,可以看出平顺性能得到了一些改善,电机力矩得到了控制分配,但这个过程设计是开环的,没有反馈,所以电流仍然是处于波动状态,汽车的平顺性通过运算证明得到了提高,相关联合仿真建模,如图7所示。
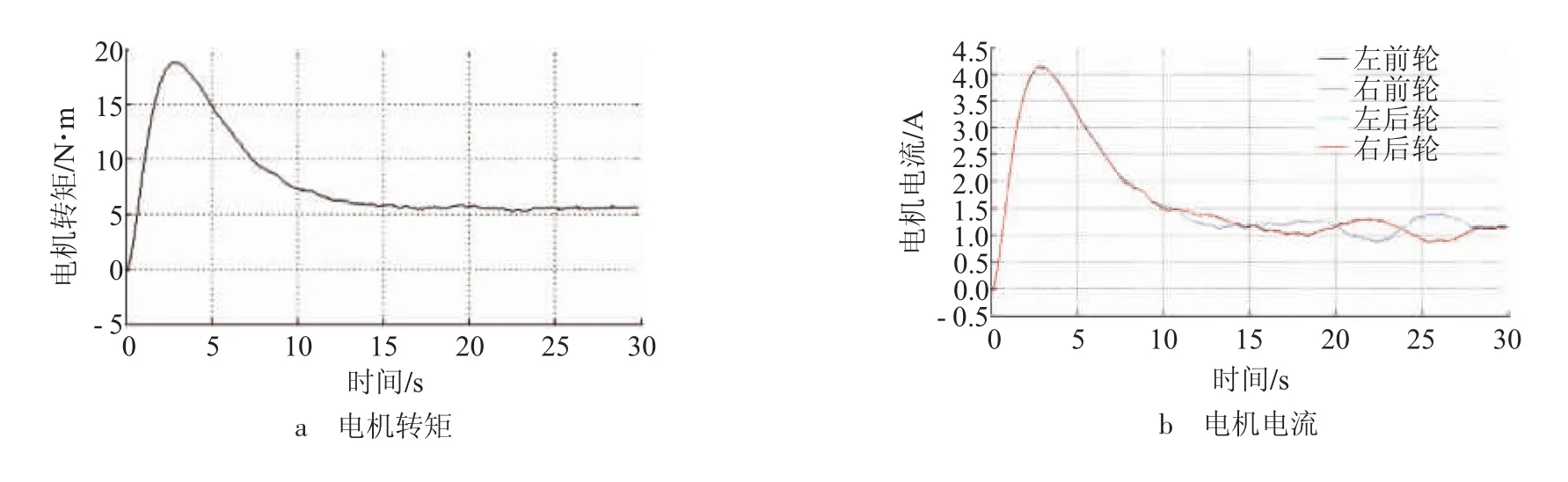
图6 H级路面下4个轮毂电机力矩按1/4分配汽车与电机参数

图7 4个轮毂电机力矩按1/4分配联合仿真模型
4.3 等转矩控制模式
等转矩控制模式在驱动策略上以等转矩输出为目标,使用最优控制理论设计了驱动系统的反馈控制器,对汽车电机模块进行了反馈,分别控制4个驱动电机的电流,电流误差得到抑制。开环方法相比力矩控制可以达到稳定的状态值,不会像开环模式那样电机电流处于波动状态。这时车身受力平稳,车身平顺性能得到提高,驱动效果有了很大改善,相关参数如图8所示。等转矩最优控制下的力矩分配联合仿真模型,如图9所示。

图8 H级路面下等转矩分配模式驱动汽车和电机参数

图9 等转矩最优控制下4个轮毂电机的力矩分配联合仿真模型
经过仿真试验,可以发现利用最优控制反馈之后的等转矩驱动模式,可以有效调节ΔI的变化,证明了文章的控制方式是可靠有效的。
4.4 直线路况的平顺性分析
为了验证比较3种情况下汽车的平顺性能,还需要通过MATLAB进行后处理运算,利用M文件求出平顺性能的等效均值[12]。在车身质心处设置车身3个方向加速度的测量函数,文章设计平顺性的分析方法为1/3倍频带评价方法,先对汽车车身座椅处3个轴向的加速度进行等带宽频谱分析,求得单轴向加权加速度均方根值,再求得总加权加速度均方根值,最后得到等效均值[13-14]。建立联合仿真模型后进行在H级路面下的3种驱动方式汽车直线行驶试验,最后得到的测量数据,如表2所示。在ADAMS环境下变换路面文件为A级路面进行同样的仿真试验,测量加速度曲线得到结果,如表3所示。

表2 H级路面直线运行下汽车平顺性测量数据

表3 A级路面直线运行下汽车平顺性测量数据
5 结论
文章基于二次型反馈最优化的方法改善电机电压波动来改善电流波动,设计加权矩阵,建立联合仿真模型,实现了电机的稳定等转矩输出。利用等转矩控制方法,4个驱动轮的力矩趋向一致,行驶波动减少,整个车身系统的平顺性得到了改善。通过对比分析,在H级路面下等效均值会从114 dB变更到98 dB左右,人体对汽车振动的感受更平稳、更舒适,证明该种纵向力矩分配策略是合理且有效的。
(续完)