计算机控制的位置伺服系统的设计与实现
2016-08-19李传友
李传友


摘要:随着计算机技术的快速发展,计算机技术控制技术应用领域在逐渐增大,计算机控制位置伺服系统的设计与实现受到较为广泛地关注。针对计算机控制工作台位置伺服系统问题进行研究,主要提出了关于 PID 控制计算机控制伺服系统,对相应的硬件、接口原理以及控制软件工作机制进行相关研究和分析。
关键词:光电编码器;工作台;线形功率放大器;可逆计数器
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2016)20-0215-02
随着计算机技术的不断进步,人们对计算机技术的需求也日益变化,计算机控制的位置伺服器系统在工作中发挥了很大的作用。本文研究一种计算机控制的位置伺服系统,根据PID控制技术,设计适合实际情况的伺服器系统。本系统通过建立模型,运用计算机相关技术,对原有的PID技术进行改进,建立具有数字化的PID计算机控制系统,通过系统模型和数据检测,挖掘出设计中存在问题,并能够及时改正,为今后实际问题的应用提供了技术支持。
1 系统组成
计算机控制的位置伺服系统方框图如图1所示,采用ISA总线工业控制计算机,经D/A转换送给伺服功率放大器,驱动直流电动机,同轴安装光电编码器,经24位可逆计数卡,把编码器的角度信号送入计算机,组成位置反馈。
2 部件选择
2.1 D/A卡
控制量的输出采用ADLINK公司的ACL-6128具有光电隔离的12位D/A模拟量输出卡,其输出为九芯D型插头,通道1端口为212H(高4位)和213(低8位),在DEBUG调试程序中,其驱动程序简单。
2.2 功率放大器
为驱动直流伺服电动机,可采用线性功率放大器,也可采用PWM功率放大器。此工作台采用线性功率放大器,其原理图如图2所示。线性功率放大器用BB公司的OPA541芯片,输出端使用OUT1与地接电动机,此时,放大倍数为3。如果把电动机的两个端子接到OUT1与OUT2,这样两端的电压Ua=6Uin,最大输出电压±30V。
2.3 电动机选择
2.4 工作台设计
直线工作台,丝杆螺距1mm,联轴节采用电磁离合器,驱动电压为24V。工作台尺寸为40×100,采用铝合金材料,重量0.11kg。
2.6 定时器卡
外接定时器采用ACL-8454,板上有2个8254芯片,可组成6个通道的计数器/定时器,用IRQ3引起定时中断,基地址是200H。
2.7 F/V电路
此电路是把光电编码器的频率信号转换为模拟电压,当正转时其输出为正电压,反转时输出电压为负,并且输出电压的幅值与光电编码器频率即电动机转速成正比。所以不能采用单电源的频率,像电压转换(f/v)电路,而是专门制作的电路,这样就可以组成模拟的速度环。
3 系统建模
3.1 速度环
速度反馈元件仍然用光电编码器,速度环的反馈信号是经f/V转换的模拟电压。速度环仍然是模拟的反馈控制系统。其传递函数如图3所示,因为光电编码器经四倍频率后每转产生2000个脉冲,所以光电编码器转速3600r/min时,则f/V的输入频率为120kHZ,f/V电路输出为±12V,符号取决于转向,故f/V转换的增益是12V/3600r/min=0.032V/(rad/s)。
通过实验测得功率放大器增益为6,电动机电枢到转速的增益为7.62(rad/s)/V,其时间常数为10ms,比给定的机电时间常数大一倍,原因是负载折合到电动机转轴上的传动惯量接近电动机的转动惯量。由于电动机功率较小,没有采用电流反馈。可得:
3.2 位置环
位置环反馈由光电编码器组成,因为每转位2000脉冲数,故反馈系数为Kf=318.3/rad。由于采用24位可逆计数器,初值是8000H,故可记录±4m的长度,而工作台位移只有160mm,所以计数器不会溢出。因为D/A转换的数字量0H对应模拟量输出-10V,而数字量7FFH对应输出0V,数字量FFH(4095)对应输出+10V,故传递系数为0.00488V/LSB,LSB代表最低有效位,即1个数。
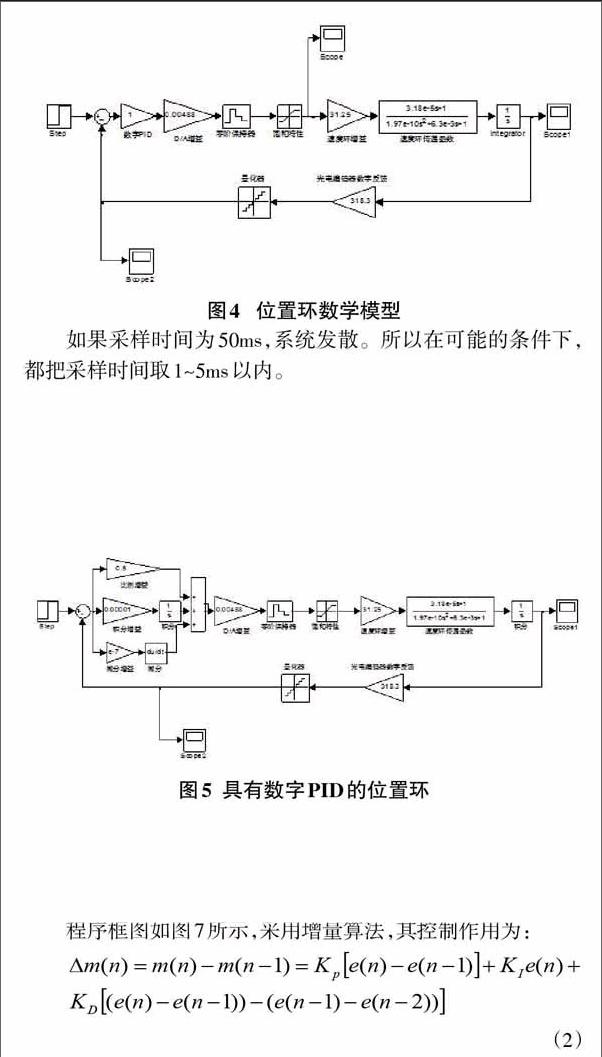
利用数字系统仿真的量化和零阶保持器的图形,可以画出位置系统模型,见图4所示,图中在D/A转换后面,加入零阶保持器,采样周期2ms,后面的饱和特性中其饱和值为±5V。数字PID系数暂定为1,量化器的参数为1,即最小值为1,脉冲当量为0.00314rad。利用MATLAB仿真,当阶跃输入100个数字量时,可得出反馈数字量的阶跃响应输出曲线,输出的角位置曲线。其稳态值为0.314rad,调整时间为0.1s,得其D/A转换输出曲线。
如果采样时间为50ms,系统发散。所以在可能的条件下,都把采样时间取1~5ms以内。
3.3 具有数字PID的计算机控制系统
数字PID的计算机控制系统数学模型如图5所示,在给定阶跃100个数时,其位置反馈的曲线如图5所示调整时间0.16s.这是在采样周期2ms的情况下,采样周期加长,会出现超调。
4 计算机控制系统程序设计
计算机采用工业控制计算机或PC/104总线嵌入式微机,控制程序采用C语言编写。
程序框图如图7所示,采用增量算法,其控制作用为:
5 总结
通过以上的研究,不难看出,计算机控制位置伺服系统的设计与实现,要立足于实际情况分析,从实际角度对问题进行考虑。首先在进行PID控制算法过程中,必须要对实际问题进行分析,尤其是关于 PID 带死区问题的有效解决,这是实现 PID 算法符合要求的关键环节;其次在进行系统控制研究过程中,要注重对系统性能的测试,需要利用实际情况,对设计的系统进行检验,这样一来,能够更好地发掘系统设计过程中存在的问题,并采取有效措施进行解决,以满足实际发展需求。
参考文献:
[1] 刘恩杉. 计算机控制位置伺服系统的设计与实现[J].计算机应用技术, 2015(11).
[2] 梁玉红. 基于 DSP-NNCPID 的电液位置伺服控制系统的设计[J].北京电子科技学院学报,2010(4).
[3] 郝君, 李建民, 胡燕. 基于 MATLAB/LABVIEW 电液位置伺服控制系统的设计[J]. 电子世界, 2013(11).
[4] 樊生文, 郑凯元, 王泽庭, 等. 直驱式容积控制电液伺服系统设计与实现[J]. 电气传动, 2013(9).
