基于ADIS16375的误差补偿在姿态解算中的研究
2016-08-18尚婷婷黄丽琼周洪涛
尚婷婷,黄丽琼,喻 娜,周洪涛
(西安北方光电科技防务有限公司,西安 710043)
基于ADIS16375的误差补偿在姿态解算中的研究
尚婷婷,黄丽琼,喻娜,周洪涛
(西安北方光电科技防务有限公司,西安710043)
在捷联惯性导航系统姿态解算的过程中,陀螺仪器件自身测量精度起到了重要作用。在ADIS16375元器件进行了工厂级校准和提供可选择滤波器库的基础上,针对影响姿态解算精度的最主要的两类误差:固定零偏和随机噪声,建立一种简单实用的特性模型。分别对固定零偏进行校正和采用小波滤波对陀螺仪误差进行补偿。试验结果表明陀螺仪误差补偿在静止状态零偏稳定性和角度漂移抑制方面有显著提高,而运动过程中在对角度漂移抑制的同时也提高了姿态解算精度。
姿态解算,ADIS16375,陀螺仪,误差补偿,小波变换滤波
0 引言
对捷联惯导系统来讲,姿态矩阵起到了数学平台的作用,其计算精度与导航精度密切相关,因而是完成导航任务需要首先解决的问题。近年来,基于MEMS(微机电系统)技术的微机械惯性器件日渐成熟,具有体积小、功能强、功耗低等特性,用MEMS惯性器件构成惯性系统已成为目前惯性领域的一个研究热点[1]。MEMS陀螺仪采用硅结构微机械系统,支持将运动转换为电信号的传感器功能。本文选择ADIS16375作为惯性测量单元,模块尺寸为44 mm*47 mm*14 mm,更容易集成到电子系统中,但应用于姿态解算存在精度不高的问题,陀螺仪误差补偿可以弥补这一缺陷。本文采用零偏校正和小波滤波变换等方法对ADIS16375进行校准,以提高姿态计算精度。
1 姿态算法模型
1.1姿态矩阵的即时修正算法

1.2姿态解算算法
系统初步只考虑载体在定点的姿态信息,即知定点经纬度信息即可确定初始姿态矩阵。并且在载体转动角度时,其位移很小,它对姿态的影响基本可忽略。捷联惯性导航姿态算法流程图如图1所示:

图1 导航坐标系下姿态计算流程图
2 MEMS陀螺仪特性分析及误差补偿模型
2.1MEMS陀螺仪特性模型
ADIS16375 iSensor是一款惯性测量系统,内置一个三轴陀螺仪和一个三轴加速度计。陀螺仪的主要性能指标为:角速度范围为±300°/s,灵敏度为0.013 108°/s/LSB,运动中偏置稳定性及角度随机游走在1σ范围内分别为12°/h和。它进行了工厂级校准和可供选择的4个FIR滤波器库,在此基础上建立陀螺仪的一种简单特性模型:

其中,ωG为实际测量角速率,ω为理想的输入角速率,ωB为固定零偏,ωN为随机噪声。固定零偏是一个常值,随机噪声包括量化噪声、角度随机游走、零偏不稳定性、速率斜坡等[3]。
2.2固定零偏及其校正
对惯导系统来说,低漂移率是其最重要的技术指标之一[4]。而ADIS16375作为速率积分陀螺需要对旋转速率信号进行积分得到载体的旋转角度,积分过程产生对零偏和随机噪声的平均,导致旋转角度信号的误差以漂移效应为主,这对关键系统目标非常不利。从定量角度表示固定零偏对姿态角度漂移的影响为:

从式(3)可以看出固定零偏最终产生与积分时间成正比的固定漂移角度,并随时间累积,最终将导致姿态角度计算的发散和失准。试验表明它对姿态角度的解算产生至关重要的影响。
对固定零偏的测量为将ADIS16375安装在六轴台上,使基准轴(x,y,z)指向正(西,北,地),对准精度在若干角秒内。保持陀螺仪输入角速率为零的静止状态,预热一段时间,并设定采样间隔时间和测试时间,对陀螺仪的输出数据进行测量,按式(4)计算零偏。

式(4)中,ωj为陀螺仪第j个输出值,N为采样次数。
2.3小波滤波对随机噪声处理
实际ADIS16375元器件差异、测试环境的变化(如转台的振动、电磁场、温度场等)使得陀螺信号随机噪声呈现非平稳随机性和非正态分布特性,事先不可能得到准确的统计特性。因此,所建漂移模型也是时变的,必须实时拟合其模型、辩识参数才能达到补偿效果,而这在实时控制中难以实现[5]。所以在基于ADIS16375的捷联惯性导航姿态算法中使用小波滤波方法对陀螺信号滤波处理。
小波分析是一种时间窗和频率窗都可改变的时频局部化分析方法[6]。它的时间窗和频率窗随频率的变化而变化,以实现对低频分量采用大时窗,对高频分量采用小时窗的符合自然规律的方法。从而将有效信号和噪声分离,显示出良好的消噪效果。小波滤波不是平滑,而是去噪。平滑是去除高频部分而保留低频部分,而去噪是不管信号的频率范围如何,都要试图去除所有噪声,保留所有信号。
小波滤波的过程为式(5),首先将离散函数即数字数列f(n)进行小波级数展开:


其次对分解得到的各层系数选择一个阈值,对细节系数进行阈值处理。使用基于Stein无偏似然估计的软阈值估计,它是一种自适应阈值选择的均方差准则的无偏估计[7]。阈值,σ为噪声标准差,dm为某个小波系数的平方值。软阈值则在硬阈值的基础上将较大的小波系数向零收缩,这样使重建信号避免间断。

选择各具优点的3种小波Db4,Sym4和Bior1.5进行试验比较。其中,Db4小波是一个紧支撑正交小波,不具有对称性。Sym4是近似对称的紧支撑小波,是Daubechies小波的改进。而Bior1.5小波,其尺度函数和小波基函数都不是正交的,但具有紧支撑和对称性。在滤波信噪比和实时性的权衡下小波分解层数选为4层。陀螺在静止状态下,采样周期为20 ms,采样4 000组数,分别使用上述3种小波对陀螺信号处理,结果如图2所示:

图2 小波滤波对陀螺数据的处理
从图2中可以直观看出小波滤波数据与原始数据相比,其离散程度明显降低。定量分析三种小波变换的均方根,因为均方根直接对应陀螺信号的零偏稳定性这一性能。db4小波、sym4小波及bior1.5小波滤波的均方根依次为0.007 050 3、0.006 086 3 和0.007 453 9,因此,sym4小波的滤波效果较好,后续试验中也将使用sym4小波。
3 试验及性能分析
试验中设定惯性坐标系I系(x,y,z)分别对应(东经0°,东经90°,天),导航坐标系N系(x,y,z)分别对应(北,东,地)。测试地点经纬度为北纬34° 16′32.9″,东经 109°0′29.2″。将安装有ADIS16375的电路板安装在六轴台上,使初始位置轴(x,y,z)指向(西,北,地)。采样周期为20 ms,使用小波为sym4,分别在静止状态和运动状态下,达到稳定状态后采样4 000组数据,测试系统在标定前后的性能。
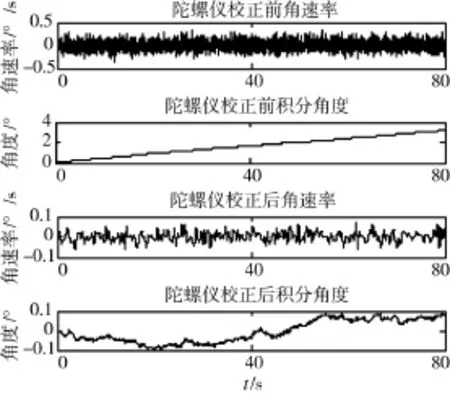
图3 静止状态陀螺仪校正前后x轴输出角速率及积分角度
图3是静止状态下陀螺仪校正前后角速率及积分角度的示意图,可以看出陀螺仪误差补偿后姿态计算得到了显著提高。从定量角度分析校正前后各误差项如表1所示,80 s的静止过程中角度漂移从3.2°左右降到了0.2°以下,性能提高了16倍。

表1 静止状态陀螺仪校正前后误差项分析
下页图4是运动状态下陀螺仪校正前后角速率及积分角度的示意图。表2则从定量角度分析校正前后各误差项,在运动停止后静止的80 s过程中角度漂移从1.36°下降到0.16°以下,性能提高了8.5倍。并且解算精度也有所提高。
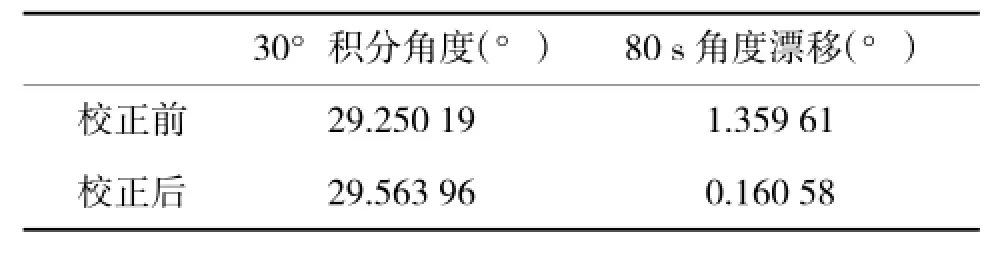
表2 运动状态下陀螺仪校正前后性能分析
4 结论
针对MEMS传感器精度低的固有缺点,对MEMS陀螺仪进行特性分析并建立误差补偿模型,在此基础上对ADIS16375陀螺仪的固有零偏和随机噪声进行了零偏校正和小波滤波。试验结果验证了这些措施的有效性,在静止状态零偏稳定性和角度漂移抑制方面有显著提高,而运动过程中在对角度漂移抑制的同时也提高了姿态解算精度。
[1]肖昌怡.基于MEMS的导航系统设计与实现[D].哈尔滨:哈尔滨工程大学,2010.
[2]NEMRA A,AOUF N.Robust INS/GPS sensor fusion for UVA localization using SDRE nonlinear filtering[J].IEEE Sensors Journal,2010,10(4):789-798.
[3]何鲲鹏.MEMS惯性器件参数辨识及系统误差补偿技术[D].哈尔滨:哈尔滨工程大学,2009.
[4]禹玮,朱洪涛.光纤陀螺信号的数字处理方法[J].传感器与微系统,2009,28(2):17-22.
[5]刘天亮,高胜利.硅微陀螺仪随机漂移建模及滤波[J].电子测量技术,2010,33(9):33-34,59.
[6]蒋庆仙,吴富梅.基于小波阈值消噪的光纤陀螺信号的抗差估计[J].惯性技术学报,2009,22(11):1596-1601.
[7]张通,张骏,张怡.基于改进小波阈值的激光陀螺漂移信号降噪[J].仪器仪表学报,2011,32(2):258-263.
Research on Error Compensation in Attitude Calculating Based on ADIS16375
SHANG Ting-ting,HUANG Li-qiong,YU Na,ZHOU Hong-tao
(Xi'an North Electro-Optic Science&Technology Defense Co.,Ltd,Xi'an 710043,China)
In the attitude calculating process of strapdown inertial navigation system,the measuring accuracy of gyroscope device itself plays an important role.Based on the factory calibration and providing optional filter bank of ADIS16375 isensor,a simple and practical characteristic model has been established,aiming at two kinds of error which have main influence of attitude calculating accuracy:fixed zero bias and random noise.The fixed zero bias has been calibrated and wavelet filter has been used to compensate the gyro random error.Test results show that it is significant to improve the gyro error compensation to zero bias stability and angle drift suppression in the quiescent state.It can also inhibit angle drift,then improve the attitude algorithm accuracy at the same time in the movement process.
attitude calculating,ADIS16375,error compensation,wavelet filter
V19
A
1002-0640(2016)07-0121-04
2015-06-08
2015-07-11
尚婷婷(1986-),女,河南商丘人,硕士研究生,工程师。研究方向:惯性导航与制导。