感应电动机直接转矩智能控制
2016-08-16改造者刘倩倩任一峰王晋军
改造者:刘倩倩 任一峰 王晋军 黄 铖
感应电动机直接转矩智能控制
改造者:刘倩倩 任一峰 王晋军 黄 铖
直接转矩控制技术作为一种高性能的控制方法使用定子磁通来确定方向的磁场和控制变换器开关状态通过离散两点监管机构获得高转矩动态性能。但没有开关状态可以生成精确的电压矢量来产生所需的扭矩和通量变化在大多数转换实例。这将导致高转矩脉动。为了解决这个问题,一个新颖的DTC策略使用模糊神经网络代替滞后控制器提出了。通量误差、转矩误差和磁通角变量作为模糊神经网络。为了解决非线性问题的直接转矩控制参数变化的模糊自适应PI速度调节器的优化分析PI控制速度响应,结合专家经验。仿真结果表明,控制系统获得快速响应速度,更强的鲁棒性、更高的速度控制精度和小的转矩脉动。
MC的共同调制策略是双电压空间矢量脉宽调制和双电压控制方法。与传统的电路转换器相比,MC有许多优点,如正弦输入电流和输出电压、能量双向流动,没有直流环节,体积小等。MC代替电路转换器在感应电动机驱动系统已成为研究焦点。
DTC是一个高性能的通信控制方法与传统媒介控制技术。它的基本思想是保持常数通量振幅,通过调节定子磁通控制转矩转速在太空,实现速度控制的目的。在交流调速系统中,MC和用于驱动感应电动机DTC方法。它不仅可以实现更好的传输性能,还可以实现可调输入功率因数,降低谐波污染。但由于磁滞控制和适应能力差,产生了高转矩脉动。
提出了一种新的模糊直接转矩控制策略。一个新的DTC系统提出了基于人工神经网络。在本文中,结合模糊控制和人工神经网络形成了一个新的模糊神经网络(FNN)控制方法。模糊神经网络是一个规则控制。它使用的语言控制的统治者,模拟人类思维根据操作人员的控制经验或相关专家的知识。它不需要建立精确数学模型的控制系统,具有较强的适应性变化的参数和环境,良好的稳定性和强鲁棒性。
本文使用模糊神经网络控制器代替传统的滞环控制器。根据经验,模糊神经网络控制器有一个合理的模糊分类转矩误差; 通量误差和磁通角优化空间电压矢量的选择,并改善了系统的动态和静态性能。
基于MC的感应电动机DTC系统
MC没有直流环节。输入端和输出端直接互相影响。MC的输入电压不平衡或变形时,输出电压将会相应地改变。当输出负载变化导致电流波形变化,输入电能质量将受到影响。所以在基于MC的调速系统,MC的调制策略和感应电动机的控制策略必须的总和。基于MC的感应电动机的直接转矩控制系统结构如图1所示。在图1中,定子磁通估计模型如下:
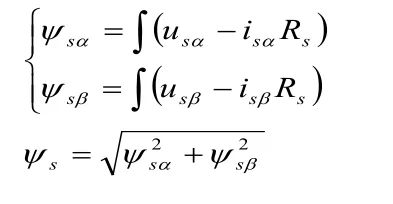

转矩估算模型如下:

usα和usβ分别感应电动机的定子电压αβ坐标系,isα和isβ分别定子电流。np是电动机极对。
给定的扭矩值可以通过PI控制器的速度误差、转矩误差被发送到转矩滞环控制器。通量错误发送流量滞环控制器。磁通和转矩控制在一定的容差范围,选择电压矢量。通量磁滞控制器是二阶,其输出是1或-1,输出1需要减少流量,输出-1需要增加通量。三阶矩磁滞控制器,输出是1,0或-1,输出1需要减少扭矩,输出0意味着保持转矩不变,输出-1需要增加扭矩。通量滞后和转矩的控制信号滞后,结合MC部门信息输入电压,输出电压空间矢量将表1中获得的。
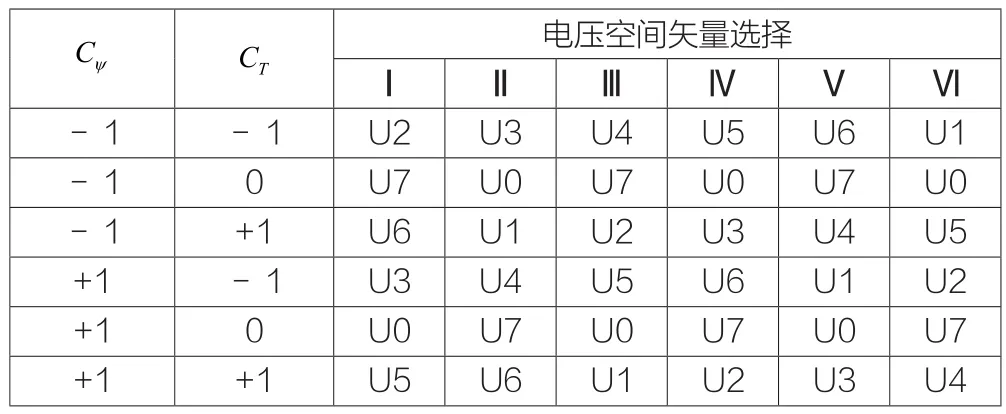
表1 矩阵变换器输出电压矢量的选择
在Ui(i=1~6)非零电压矢量,情况和得以是两个零电压向量。六个零电压向量坐标平面划分为六个部门,如图2所示。选择合理的电压向量可以使定子磁通和转子磁通幅值基本不变。在传统的直接转矩系统,扭矩使用三阶滞后控制器,流量使用二阶滞后控制器。如图3所示。本文采用循环通量模型,也就是说,在每个采样周期;根据转矩和磁通开关状态选择滞后控制器输出和通量部门。例如,在图2中,如果定子磁通在第一个扇区和速度是逆时针,定子磁通幅值可能增加了选择U2和U6,减少了选择U3,U5。转矩可能增加了选择U2和U3,选择U5和U6下降了。情况,得以选择时,定子磁通幅值保持不变,同时,减少了转矩。这种控制方法实现适当选择合适的空间电压矢量,控制定子磁通和电磁转矩和快速的响应速度,使通量在一个圆形区域。但滞后控制器只给了一个信号,直接转矩不能选择控制方法根据转矩的大小,高转矩脉动引起的。在本文中,提出了模糊神经网络控制器,而不是滞后控制器。

图1 基于MC DTC系统结构
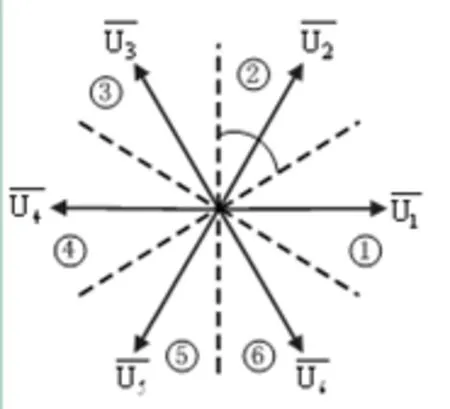
图2 Output voltage vectors of MC or

图3 Flux hysteresis and torque hysteresis comparat
直接转矩模糊神经网络控制系统
在DTC系统中,控制效果理想取决于选择开关电压矢量是合理的。在传统DTC系统中,只选择一个开关电压每时间,它不仅控制定子磁通幅值,但也旋转速度。而且如果不需要电压矢量电压矢量,这将使磁通和转矩控制偏差。此外,磁通和转矩被滞后控制器判断0或1。很难解决低速转矩脉动问题。为了解决这个问题,介绍了一种模糊神经网络控制器代替滞后控制器和开关电压矢量表。直接转矩模糊神经网络基于矩阵变换器的控制系统结构如图4所示。
模糊神经网络是一种新的技术结合模糊逻辑推理的知识表达能力和神经网络的自学习能力,是模糊逻辑控制和神经网络控制的有机结合,可以显示互补和相互关联。穷人的模糊神经网络克服了缺点学习模糊控制和神经网络推理差控制。在这个控制器,神经网络的输入和输出信号和隐藏节点用来表示隶属度函数和模糊控制规则。抽象模糊控制规则转换成一组输入和输出神经网络样本,这使得神经网络学习和记忆这些样品。
在第一层的控制器,流量误差信号和转矩误差信号乘以相应的权重被发送到第一个节点。节点隶属函数是三角函数,其分布如图5所示。
在第二层,两个输入权重是小运算,送到第三部分,其输出为:

ωi是第二层的输出,输出节点我的第三层,是我组件所需的电压矢量幅值的权重。

Vc是MC提供直流电压,选择所需的电压矢量增量角在表2。是积极的(P)时,选择相应的增量角从表2。当为零(Z),增量角不是选择。
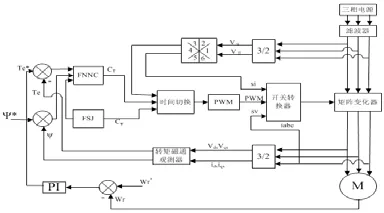
图4 直接转矩FNNC系统结构

图5 Membership function distribution
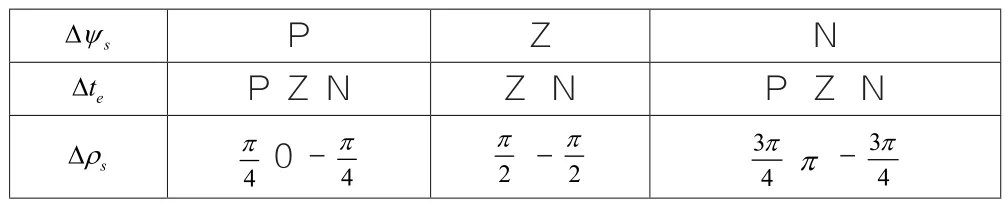
表2 所需的电压矢量增量角的选择
预期的电压矢量的相位角(usref)D和Q轴如下:

预期的电压矢量的振幅和相位角智能控制器操作后得到,然后发送到空间电压矢量控制器的输出。调制后的开关状态得到MC。
仿真结果
提出了模糊神经网络的仿真模型DTC技术基于MC成立于MATLAB的simulink仿真环境。总结了仿真参数表3、4和5为感应电动机,输入滤波器分别和其他数字仿真参数。

表3 感应电动机参数

表4 输入滤波器参数

表5 数字仿真参数
结果1 wb参考流量提出了基于滞环控制器和模糊神经网络控制器在图6中,可以看到它的模糊神经网络系统的流量比的通量,近圆形,光滑滞回系统。结果12海里参考转矩步骤呈现在图7中,在那里可以看到,基于模糊神经网络控制器脉动转矩脉动转矩下降了49.5%比基于滞环控制器。并给出了定子电流波如图8所示。

图6 定子磁链对比曲线

图7 转矩响应对比曲线
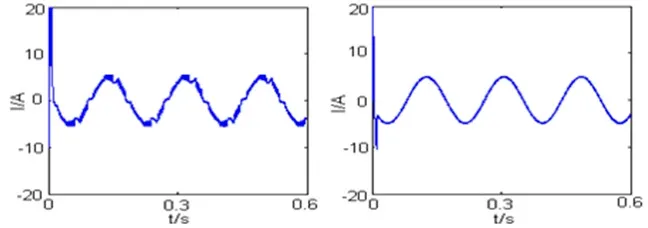
图8 定子电流对比曲线
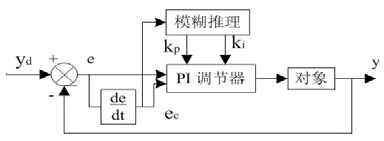
图9 模糊自适应控制器结构图
模糊自适应PI速度调节器
结构和模糊规则
模糊自适应PI控制器的结构图如图9所示。
模糊自适应PI控制器的输入速度误差e和错误率ec速度。它必须满足e和ec PI参数设置的要求在不同的时间。其结构如图10所示。模糊自适应PI使用模糊规则的模糊推理通过计算e和欧共体通过查表和调整参数。调整参数表达式如下:

和传统的PI控制器的参数,参数模糊自适应控制器,比校正因子,是微分校正系数基于速度误差和速度误差模糊经验。

图11 速度响应曲线进行比较
(1)当系统响应是在上升的过程(e是正的(P)),Δkpis P,,这是增加量kp;当反应过度,Δkpis N, 这是减小量;当误差为零(Z),三种情况:ec is N,overshoot is bigger and bigger,is N; ec is Z,in order to reduce error,is P; speed error rate is P, the positive error is bigger and bigger,is P.
校正系数的模糊控制规则表如表6所示
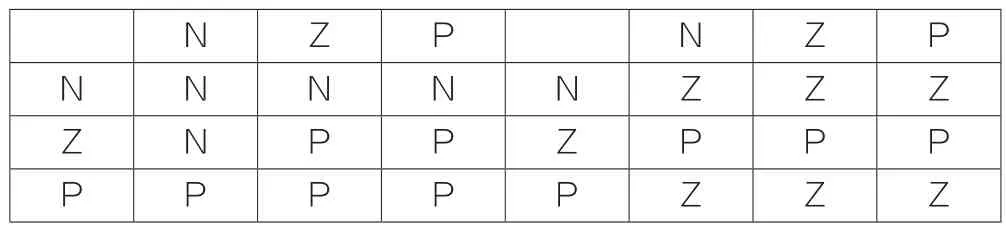
表6kp和ki模糊规则
仿真结果
模糊自适应直接转矩控制的仿真模型基础上建立了矩阵变换器在MATLAB的simulink仿真环境。感应电动机参数表3中给出。参考转矩是15 N•m,参考通量1Wb。给定转速500 r / min。图11显示了速度响应曲线。
在图11中,我们可以看到,后者有快速响应,超调小,无静态误差。这是因为传统的PI控制器的参数是固定的。它能够得到更好的静态和动态响应在一定的速度范围。然而,当给定的速度大规模的变化,系统性能将会恶化。但是,模糊自适应PI速度控制器可以根据情况立即调整PI参数的速度改变,这样可以获得最佳的控制性能。
结语
在本文中,一个模糊神经网络控制器和模糊自适应速度控制器是基于矩阵变换器应用于直接转矩控制系统。可以看出,转矩脉动和流量脉动大大减少在稳定转速范围通过使用模糊神经网络控制器。使用模糊自适应速度控制器代替传统的PI控制器提高了调速的系统的适应能力,提高系统响应速度和稳定精度。仿真结果表明,模糊自适应调节器可以显著提高基于MC的DTC系统的静态和动态性能。

刘倩倩 任一峰 王晋军 黄 铖
中北大学
10.3969/j.issn.1001-8972.2016.09.030
