基于ZigBee的井下机车监控系统设计
2016-08-16赵玉荣
赵玉荣 方 策
基于ZigBee的井下机车监控系统设计
赵玉荣 方 策
针对井下的特殊环境,文章设计了一种基于ZigBee技术的井下机车监控系统,通过设计参考节点、移动节点和协调器节点来构建井下的无线传感网络。根据节点具体的实际需求和设计特点,对节点的功能进行软件设计。
井下机车监控系统的硬件设计
系统结构简介
整个机车运输监控系统分为井下和井上两部分,井下部分主要是放置在机车上或轨道上的各节点组成的无线传感网络,包括移动节点、参考节点和协调器节点。井下运行的机车上都安装有移动节点模块,可以实时跟踪显示机车的位置信息 ;参考节点和协调器节点都固定安装在巷道内,比如事故多发区,轨道的进出口、工作人员密集区和拐弯处。井上的监控机房装有界面化软件的主机,通过串口线将上位机和协调器连接起来,以此来接收井下的信息数据实现监控。
协调器节点的硬件结构
协调器节点主要负责整个无线网络的建立与维护,同时将收集到的数据信息反馈给上位机它是整个ZigBee网络的控制中心。
其中LPC2103是支持实时仿真的ARM7TDMI-S CPU,并自带16kB 和32kB嵌入的高速Flash存储器,LPC2103包含两个UART串行接口、2个I2C 总线和SPI到SSP总线,配合片内的存储器一起使用,实现通信网关和协议转换。协调器节点的结构如图1所示。
参考节点硬件设计
参考节点是由CC3430芯片和一些外围元器件组成,参考节点硬件结构如图2所示。
电路设计过程中为了方便用户携带安装,尽量减小节点体积,除了必要的时钟和程序烧写接口、调试接口,就没有设计其他的元器件。具体硬件有:
(1)32MHz系统主时钟。采用贴片晶体,晶体只有引脚1和引脚3有效,分别通过电容再各自连接到CC2430芯片的引脚21、引脚29;
(2)CC2430片上系统。利用较低的成本就可以建立强大的网络节点,性能稳定,用户可以根据实际需要来选择芯片;
(3)大功率的参考节点主要是附加了射频前端CC2591,通过提高无线通信部分的发射功率,提高信号强度来改善接收灵敏度,并扩大了通信距离。
移动节点硬件设计
移动节点的硬件结构与参考节点大致相同,因为移动节点的位置是不断更新的,为了能及时更新位置,其内部采用自带定位引擎功能的CC2431芯片。通过接收参考节的RSSI值,来定位计算自身的位置坐标,而其他结构相同。
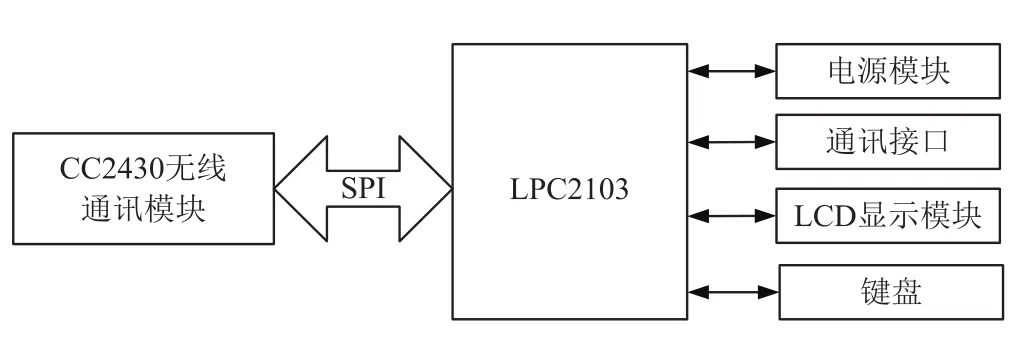
图1 协调器节点的结构图

图2 参考节点硬件结构图
井下机车监控系统的软件设计
参考节点的软件设计
为了移动节点能够更好定位位置坐标,参考节点会向其提供位置信息的参考数据包,包括参考节点自身的坐标信息和接收信号强度RSSI均值。首先对参考节点进行初始化设置,包括设置寄存器、初始化数据变量以及引脚的定义等。首次加入网络时,协调器节点需要对参考节点的配置位置坐标,并将坐标值写入存储器,如果参考节点已经连接到网络,协调器节点会直接读取存储器内的坐标值。
初始化后,参考节点会反复确认是否有移动节点向其发送XY−RSSI请求消息(串ID 0x0012),确认请求后回复(串ID 0x0011),并优化计算所收集到的RSSI 值得到其均值。移动节点将接收到的坐标值和RSSI均值作为参数来计算本身的位置RSSI信息。除了应答移动节点的请求,参考节点还要反复检测是否接收到来自上层节点的配置命令。如果有,参考节点就对(串ID 0x0012)进行判断分析,并将数据包中的坐标信息写入Flash存储器。
移动节点软件设计
为了更新移动节点的坐标(X,Y),移动节点需要向参考节点广播位置更新请求(串ID 0x0012),收到Blast 信息广播后,参考节点会对接收到的RSSI值进行加权计算,并回复其位置坐标及RSSI平均值。移动节点再根据参考节点发送来的坐标值,收集其数据和RSSI值,并按从小到大的顺序排列;通过计算参考节点坐标值的偏移量,将参考节点的实际坐标值 (X,Y)转换成定位运算所需要的逻辑坐标;获得逻辑坐标后,系统根据定位算法进行定位运算,并将结果转换成实际坐标值。
移动节点完成自己坐标的定位运算后,首先向定位网络监控管理设备发送请求信息,并将自身计算出的坐标值(X,Y)上传给网络。移动节点参考相邻参考节点所发来的数据信息来获得它们的位置坐标和RSSI值,再将坐标和相应参数(,)An代入具体的计算公式得出自己的位置坐标(X’,Y’),并发送给协调器节点,上传给井上的上位机。
协调器节点的软件设计
协调器节点初始化设置后,为了确定网络的连接会反复的检测是否有来自上位机的控制命令,直到确定收到上位机的控制命令。协调器节点在收到控制命令后,首先向各个参考节点广播位置请求信息;同时反复确认是否有来自其他节点的请求信号,如果有就将数据通过串口发送到上位机,协调器节点的工作就完成了。
井下机车监控系统仿真
首先对参考节点进行上电复位,并设置了5个参考节点,再将移动节点依次放置临近参考节点的位置,不断调节移动节点的A值和N值,来提高节点的定位精度。多次实验后确定A值的理想范围是46~49,N值的理想范围是15~25。
设置完成后,如果不断地改变移动节点的位置,移动节点坐标会不停的变化,为了测试定位进精度的准确性,系统把监控界面上显示的坐标和实际坐标值进行比较,并对其作出误差分析。从表中可以看出当N值为16、A值为39.00时的误差分析。系统布置的参考节点比较密集,每15米放置一个,可以看出误差在1.7m左右。误差分析如表1所示。

表1 误差分析
结束语
通过上述的实验验证,实际坐标与监测坐标误差较小,文章设计的监控系统对井下机车具有一定的定位效果,节点组成的无线传感网络性能也与实际要求相符,具有一定的可行性。

赵玉荣 方 策
安徽新华学院电子通信工程学赵玉荣(1987-)女,安徽合肥人,安徽新华学院电子通信工程学院助教。
赵玉荣(1987-)女,安徽合肥人,讲师,安徽新华学院电子通信工程学院教师。
省级自然科学研究项目(KJ2016A305);省级创新创业训练计划创新训练项目(AH201412216004)
10.3969/j.issn.1001-8972.2016.09.022
