基于灰预测的无线传感器网络跟踪策略研究*
2016-08-11左君伟
左君伟 衣 晓 吴 斌
(1.海装采购中心 北京 100072)(2.海军航空工程学院 烟台 264001)
基于灰预测的无线传感器网络跟踪策略研究*
左君伟1衣晓2吴斌2
(1.海装采购中心北京100072)(2.海军航空工程学院烟台264001)
摘要基于预测的目标跟踪是无线传感器网络一个重要的应用,但在实际情况下,由于跟踪目标产生大量数据计算以及传输,从而导致无线传感器网络能量消耗极大。为了克服过大的数据计算导致节点过早死亡的现象,提出了一种基于灰预测的节点协同跟踪策略,引入主通信节点和主预测节点,由主预测节点负责计算目标位置、预测出现节点的区域。主通信节点负责数据的上传,节点唤醒。同时,由这些通信节点建立起一条数据传输线路,避免泛洪式数据传输损耗网络能量。通过实验仿真表明,该策略在保证目标跟踪精度的前提下,均衡网络的能量损耗,避免节点因能量耗尽过早的死亡。
关键词无线传感器网络; 目标跟踪; 灰预测; 节点协同
Class NumberTP393
1 引言
目标跟踪是无线传感器网络一项非常重要的应用,其在军事及民用领域有着非常大的应用前景[1]。基于无线传感器网络的目标跟踪在战场对于重点目标的感知极有可能影响着整个战场态势的转变。在无线传感器网络跟踪过程中一方面要解决目标的实时跟踪定位,另一方面还要解决跟踪信息的及时反馈。与此同时,由于无线传感器网络自身结构特点所致,节点小型化带来了自身携带能量少,处理器运算有限等缺陷。所以在跟踪过程中,在确保跟踪精度的前提下,简化算法。在保证跟踪到目标的前提下,减少参与跟踪的节点数量,从而达到延长网络寿命的目的。
文献[2]提出了动态最近邻协作目标跟踪算法,利用目标周围的节点动态成簇,来解决实时跟踪目标的问题,在预测方面利用集中式卡尔曼滤波进行状态估计,在最近邻准则下选取目标出现区域的簇头,由簇头唤醒周边节点进行跟踪。但是,需要注意到的是,卡尔曼滤波对于节点运算要求较大,极易消耗节点能量。同时,动态成簇的范围一般为探测距离的两倍,基于动态簇的目标跟踪易唤醒不必要或贡献量少的节点,从而增加网络能耗。
文献[3]提出了基于最小均方估计误差的目标跟踪协同调度算法,通过分布式处理上个时刻节点计算出来的目标状态及当前测量值来实现对目标的状态估计,解决了集中式卡尔曼滤波数据处理量大的问题。由于是基于动态成簇式跟踪,由簇头来计算及发布跟踪命令,簇头消耗的能量巨大,极易造成簇头提前死亡。
文献[4]提出了一种改进型的粒子滤波算法,针对目标运动时变性,通过选择合适的重要密度函数进行改进,降低权值方差,避免了粒子退化。由于在先期采样过程中,需要重复计算先验概率密度,造成节点计算量过大,从而过早地消耗了能量。
文献[5~6]都是在自适应成簇的基础上提出基于权值的目标跟踪策略,文献[6]用测量到目标的强度作为权值进行层次分析法选取簇头进行目标的时实跟踪,文献[5]基于目标的速度动态地调整信息传输频率,文献[7~10]存在的问题与上述类似。
针对上述问题,本文提出了一种基于灰预测的目标跟踪节点协同策略,利用主预测节点通过灰预测计算目标下个时刻出现处于节点的位置,由主通信节点负责唤醒该区域节点的方法来解决目标的实时跟踪问题,通过有限地探测到目标的节点进行加权质心算法来实现对目标的精确地跟踪定位。通过将运算与通信处理的方式,解决了跟踪节点数据处理通信量大的问题,避免了节点因提前消耗完能量死亡的问题,从而延长了网络寿命。
2 节点协同跟踪策略
2.1目标出现区域预测
由探测到目标信号最大的节点担任主预测节点,同时,这些节点按下述方法进行预测。
将数据进行预处理:
(1)
得到新的序列:
X=(x(0)(t1),x(0)(t2),…,x(0)(tn))
Y=(y(0)(t1),y(0)(t2),…,y(0)(tn))
求X的1-AGO序列得:
X(1)=(x(2)(t1),x(2)(t2),…,x(2)(tn))
(2)
其中
Z(1)为X(1)的紧临均值生成序列:
Z(1)=(z(1)(t2),z(2)(t3),…,z(2)(tn))
(3)
其中
z(1)(tk)=0.5(x(1)(tk)+x(1)(tk-1))k=2,3,…,n
则
(4)

(5)
则其变化趋势的微分方程为
(6)
其时间响应式为
(7)
则
(8)
式(8)为预测目标出现区域的节点横坐标。同理,纵坐标可依上述方法求得。
2.2主通信节点的选择策略
t时刻,目标运动轨迹周围的节点竞选主通信节点,主通信节点只考虑距主预测节点的距离以及自身剩余的能量,其竞选函数为
(9)
其中,E0为节点的最大能量,Er为当前节点的剩余能量,D为节点的探测距离,d为该节点距主预测节点的距离。
2.3协同跟踪策略
(10)
会被主通信节点唤醒,进入目标跟踪过程,从而达到持续性跟踪目标的目的。
2.4跟踪定位算法
首先根据探测值大小进行排序,利用式(1)求出其平均值,排除平均值一下的节点,由探测值在平均值以上的节点来定位目标位置。具体算法如下:
满足条件的探测节点坐标序列为N1(x1,y1),N2(x2,y2),…,Nn(xn,yn),其对应的探测值为{a1,a2,…,an},加权质心定位算法为
(11)
需要注意的是,目标跟踪定位算法是在主通信节点上完成的,由于无线传感器网络跟踪目标的实质是让用户实时地感知目标的变化。
2.5数据传输路径建立
将计算出来的目标位置存储在主通信节点上,在2.3节中上个时刻主通信节点下传到下个目标区域的节点中包含自身位置信息,在竞选完成下个主通信节点后,由主通信节点联系上个时刻的主通信节点,从而形成了一条数据传输链。其具体工作如下:

(12)
3 仿真实验
为验证本文算法的有效性,进行四组实验,对比算法为自适应动态簇加权质心跟踪算法。仿真条件设置如下,将1000个传感器节点均匀布置在500×500m的空间范围内,预设目标速度10m/s,动态簇的簇头及基于灰预测唤醒的主通信节点设定工作时间为0.5s,利用蒙特卡洛方法进行100次试验,两种算法跟踪误差如图1所示。
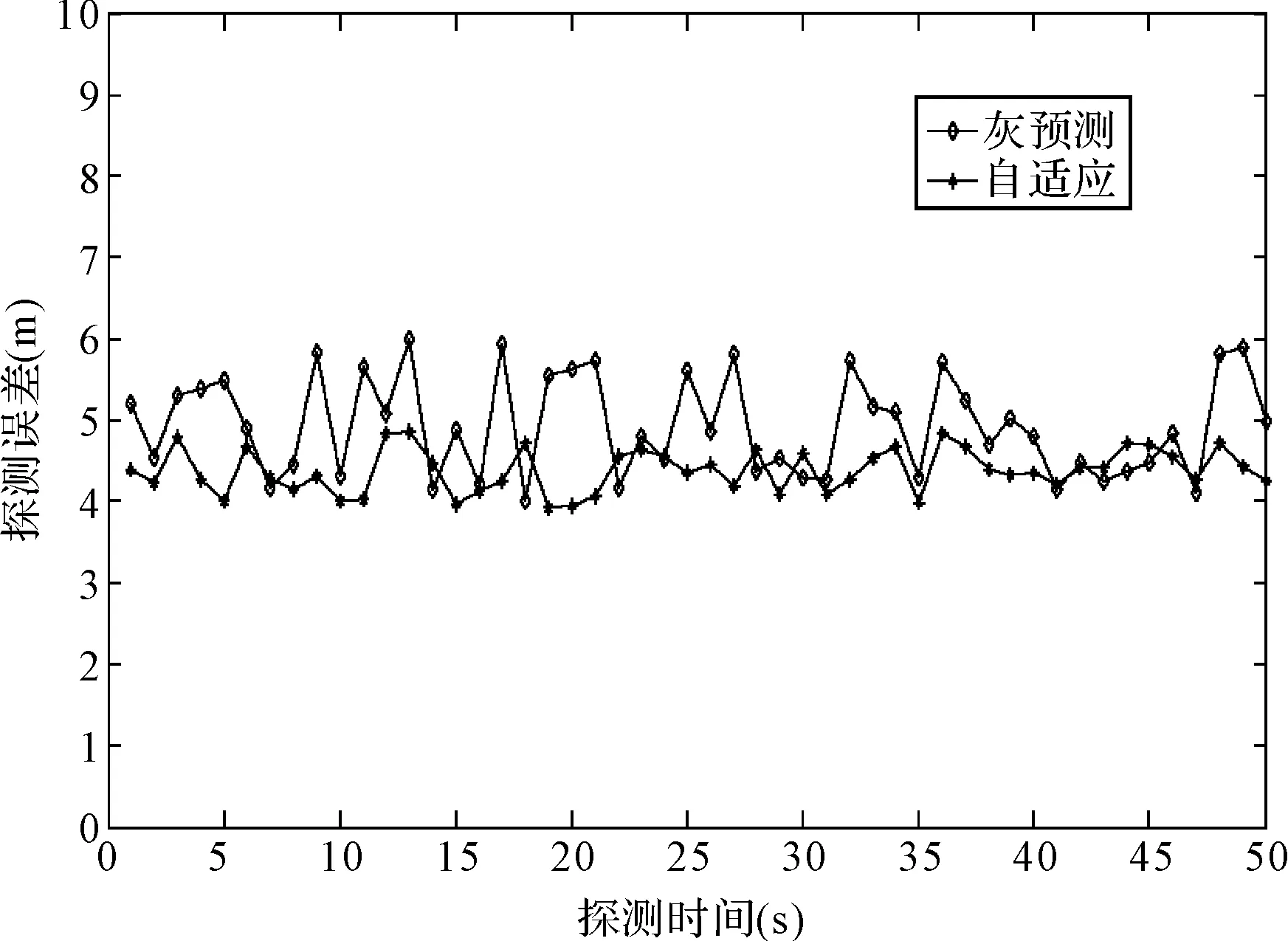
图1 跟踪误差对比图
预设数据处理与数据传输消耗的单位能量相同,节点每进行一次数据处理和传输消耗能量为0.025J,利用蒙特卡洛方法,计算跟踪一定次数后网络平均剩余能量如图2所示。
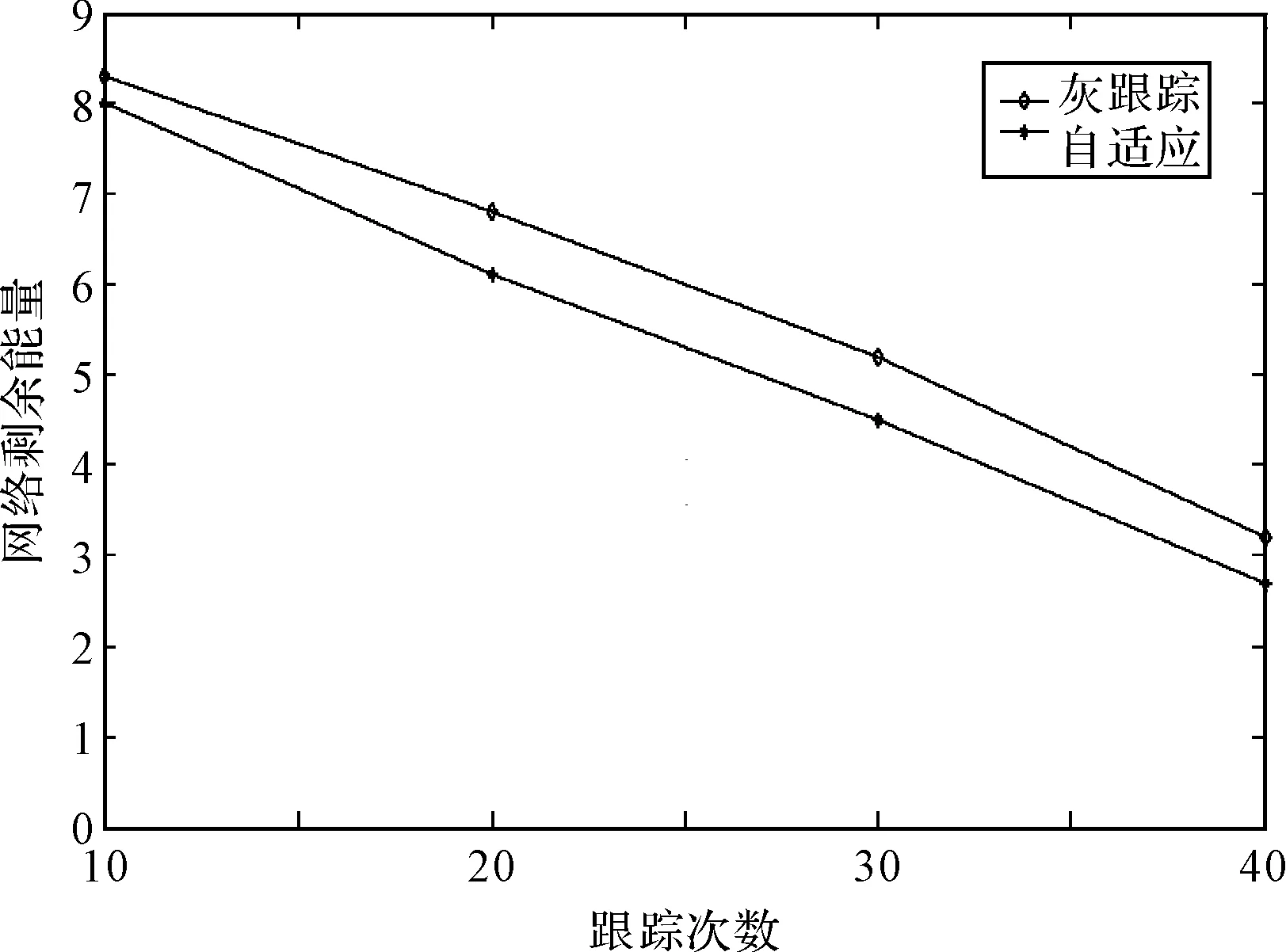
图2 网络剩余能量对比图
预设网络每进行一次数据处理与传输,时间代价为1ms,利用蒙特卡洛方法,计算一定探测次数下,两种算法的网络平均时间延迟,如图3所示。

图3 时间延迟对比图
由于通过灰预测目标出现区域节点位置可能不存在,本文增加一个浮动变量Δ,选取浮动变量不同,其探测精度如图4所示。
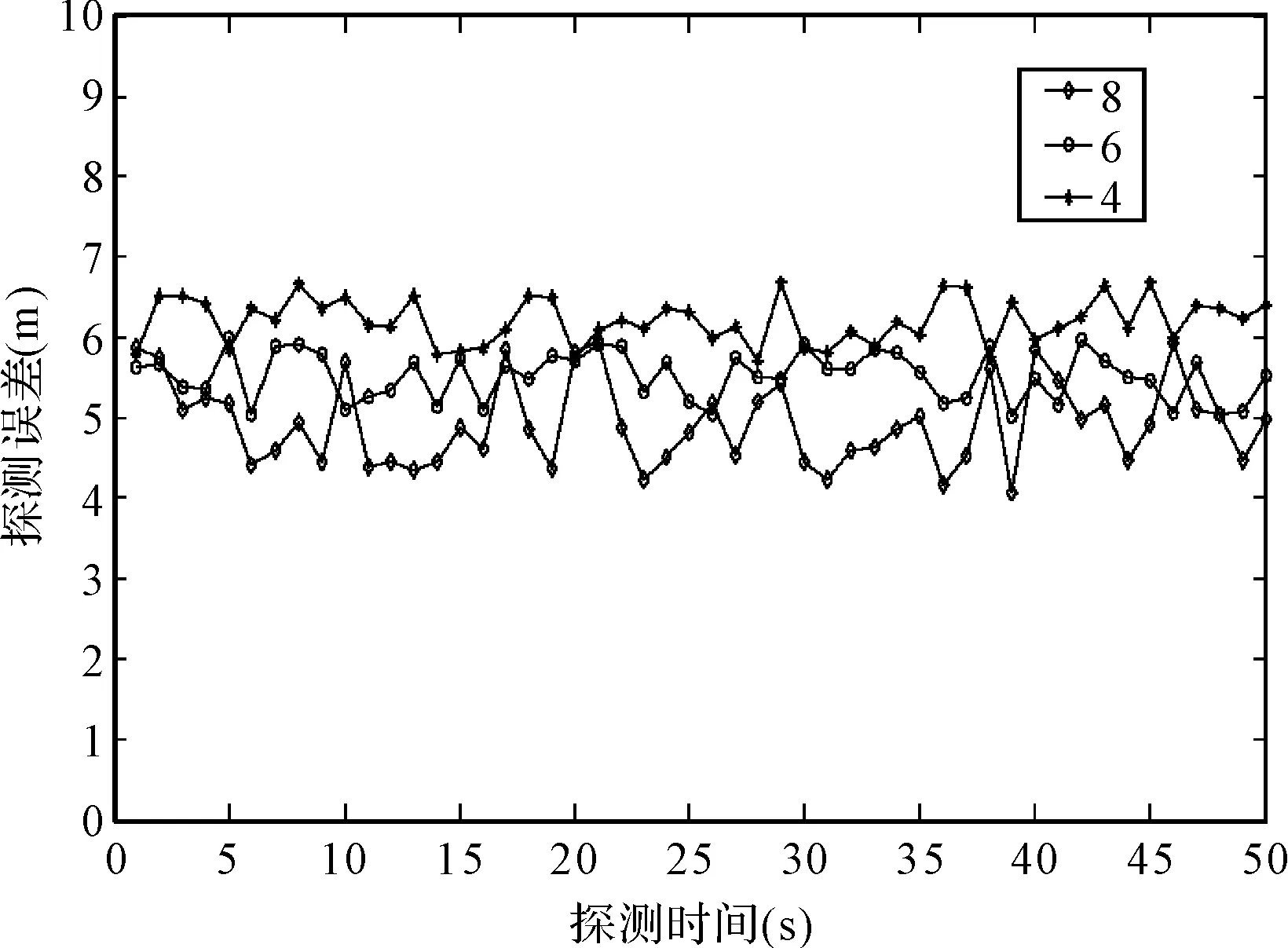
图4 Δ与探测精度示意图
4 结语
从探测精度考虑,自适应动态簇加权质心跟踪算法比本文算法跟踪精度高,但两者最大误差小于等于2m,其主要原因在于本文算法基于能量考虑,减少了距离目标较远的探测节点加入,另外,通过将预测与通信分开处理,减少目标轨迹上主干节点的能量损耗,如图2所示,本文算法在剩余能量上比自适应动态簇加权算法有优势。基于无线传感器网络的目标跟踪其实质在于使用户实时地感知目标的变化,从另一方面来说,无线传感器网络的另外一个重要特性就是实时性,本文算法在目标跟踪的同时由主通信节点建立起一条数据传输链路,确保目标信息能够及时地传递给用户,从时间延迟上来看,如图3,本文算法优势明显。由于基于灰预测的目标出现区域节点可能在网络中并不存在,本文算法引入浮动变量Δ,如图4所示,Δ与跟踪精度大体上成正比关系,原因是,浮动变量选取的越大,符合预测条件的节点就越多,唤醒参与跟踪节点也越多,从而提升了探测目标的精度。
本文提出的基于灰预测的无线传感器网络跟踪策略,通过分开网络中跟踪与通信两项工作,从而降低了跟踪主干节点的压力,节约了能量,提升了网络寿命,同时由主通信节点形成的数据链路能够确保目标信息实时被用户接收,时延性较低。本文在跟踪误差方面处于可接受范围内。
参 考 文 献
[1] 李志刚,屈玉贵,刘桂英.用无线传感器网络探测跟踪目标[J].通信技术,2006,12:72-74.
LI Zhigang, QU Yugui, LIU Guiying. Detecting and Tracking Target in Wireless Sensor Networks[J]. Communication Technology,2006,12:72-74.
[2] 龙慧,樊晓平,刘少强,等.无线传感器网络动态最近邻协作目标跟踪算法[J].传感器与微系统,2012,31(7):135-139.
LONG Hui, FAN Xiaoping, LIU Shaoqiang, et al. Dynamical target tracking algorithm of WSNs based on nearest neighborhood collaboration[J]. Transducer and Microsystem Technologies,2012,31(7):135-139.
[3] 莫磊,胥布工.无线传感器网络目标跟踪平台协同调度的实现[J].系统工程与电子技术,2011,33(5):1129-1134.
MO Lei, XU Bugong. Realization of collaborative Schdeuling over Wireless Sensor Networks Target Tracking Platform[J]. Systems Engineering and Electronics,2011,33(5):1129-1134.
[4] 黄艳,梁韦华,于海斌.基于粒子滤波的无线传感器网络目标跟踪算法[J].控制与决策,2008,23(12):1389-1394.
HUANG Yan, LIANG Weihua, YU Haibin. Tracking algorithms based on particle filter for wireless sensor networks[J]. Control and Decision,2008,23(12):1389-1394.
[5] 彭勇,王国军,邢潇飞.无线传感器网络中一种自适应跟踪协议[J].传感技术学报,2009,22(3):428-432.
PENG Yong, Wang Guojun, XIN Xiaofei. An Adaptive Target Tracking Protocol in Wireless Sensor Networks[J]. Chinese Journal of Sensors and Actuators,2009,22(3):428-432.
[6] 刘军,刘晖,叶宁,等.无线传感器网络自适应动态簇目标跟踪策略[J].东北大学学报,2011,32(8):1081-1083.
LIU Jun, LIU Hui, YE Ning, et al. Adaptive Dynamic-Cluster Based Target Tracking Strategy in Wireless Sensor Networks[J]. Journal of Northeastern University(Natural Science),2011,32(8):1081-1083.
[7] 杨小军,邢科义.无线多跳传感器网络下基于粒子滤波的信道容错的目标跟踪方法[J].自动化学报,2011,37(4):440-448.
YANG Xiaojun, XING Keyi. Channel Fault Tolerant Target Tracking in Multi-hop Wireless Sensor Networks Based on Particle Filtering[J]. Acta Automatica Sinica,2011,37(4):440-448.
[8] 徐小良,汤显峰,葛泉波,等.基于量化新息的容积粒子滤波融合目标跟踪算法[J].自动化学报,2014,40(9):1867-1874.
XU Xiaoliang, TANG Xianfeng, GE Quanbo, et al. Target Tracking Algorithm Based on Cubature Particle Filtering Fusion with Quantized Innovation[J]. Acta Automatica Sinica,2014,40(9):1867-1874.
[9] 朱志宇,苏岭东.二进制无线传感器网络中的分布式自适应粒子滤波目标跟踪算法计算机科学[J].计算机科学,2013,40(8):43-45.
ZHU Zhiyu, SU Lindong. Target Tracking Based Distribute Adaptive Particle Filter in Binary Wireless Sensor Networks[J]. Computer Science,2013,40(8):43-45.
[10] 李峰荣,刘贵喜,孙庆方.基于混合滤波的无线传感器网络融合跟踪方法[J].航空学报,2010,31(9):1849-1857.
LI Fengrong, LIU Guixi, SUN Qingfang. A Fusion-tracking Scheme in Wireless Sensor Networks Based on Mixed Filtering[J]. Acta Aeronautica ET Astronautica Sinica,2010,31(9):1849-1857.
收稿日期:2015年10月8日,修回日期:2015年11月22日
作者简介:左君伟,男,工程师,研究方向:航空装备管理。衣晓,男,博士,教授,硕士生导师,研究方向:信息融合,无线传感器网络。吴斌,男,硕士研究生,研究方向:无线传感器网络。
中图分类号TP393
DOI:10.3969/j.issn.1672-9722.2016.04.015
Tracking Strategy for Wireless Sensor Networks Based on Grey Prediction
ZUO Junwei1YI Xiao2WU Bin2
(1. Navy Equipment Procurement Center, Beijing100072)(2. Naval Aeronautical and Astronautical University, Yantai264001)
AbstractIt is a very important application of target tracking which is based on gery prediction in wireless sensor networks. However, a large amount of calculation and transmission which is produced by tracking target lead to high consumption of wireless sensor networks’ energy. A strategy of nodes collaborative tracking based on grey prediction is proposed to solve the phenomenon that a large amount of data leads to the death of nodes prematurely, bringing in the main communication node and main prediction node, target position is figured out by the main prediction node, area of nodes appearance is predicted by the main prediction. Uploading of data and node waken-up is charged by the main communication node. Meanwhile, a line of data communication is built up by these main communication node to avoid depleting networks’ energy due to the data communication floodly. Simulation results show that the strategy can balance energy consumption and avoid death of node energy is consumpted prematurely under a certain tracking precision.
Key Wordswireless sensor networks, target tracking, grey prediction, node collaboration