基于单片机的悬挂运动控制系统的设计与实现*
2016-08-10党智乾
党智乾
(西安航空职业技术学院自动化工程学院 西安 710089)
基于单片机的悬挂运动控制系统的设计与实现*
党智乾
(西安航空职业技术学院自动化工程学院西安710089)
摘要论文系统采用MSP430F149为主控芯片,通过液晶屏和键盘与操作人交互,通过步进电机对悬挂载荷进行定位运动控制,使用安装于悬挂载荷的反射式红外光电传感器提供的反馈对面板上给定曲线进行闭环跟踪。实际系统测试表明:该系统具有工作性能稳定、定位误差小的特点,在现代工农业中,具有广泛的使用前景。
关键词MSP430单片机; 悬挂运动控制系统; 步进电机; 红外传感器
Class NumberTP368.1
1引言
在现代的工业控制系统、医疗设备仓储物流等系统中,悬挂运动系统[1]的应用越来越多,这些系统中悬挂运动部件通常是具体的执行机构,悬挂部件的运动精确性是整个系统可靠性工作的决定性因素。本文采用MSP430F149单片机[2]和步进电动机设计了悬挂运动控制系统,图1为悬挂运动控制系统模型。通过单片机产生脉冲信号驱动步进电动机[3],带动悬挂物体在平面上做特定的准确运动或寻迹运动。同时还设计了键盘和显示模块,可随时设定或显示悬挂物体的位置。
2系统总体方案设计
系统总体结构框图[4]如图2所示,可分为控制器模块、电机驱动模块、寻迹模块、显示模块和键盘模块五大部分。
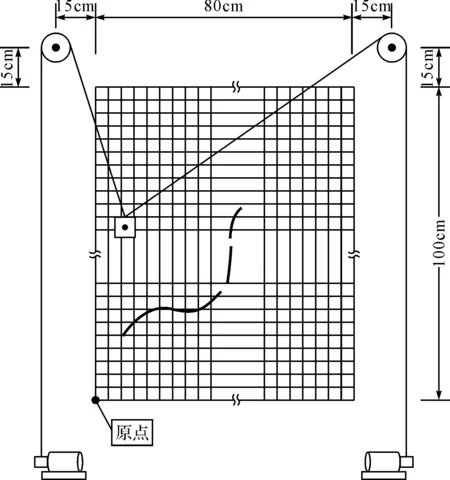
图1 悬挂运动控制系统模型
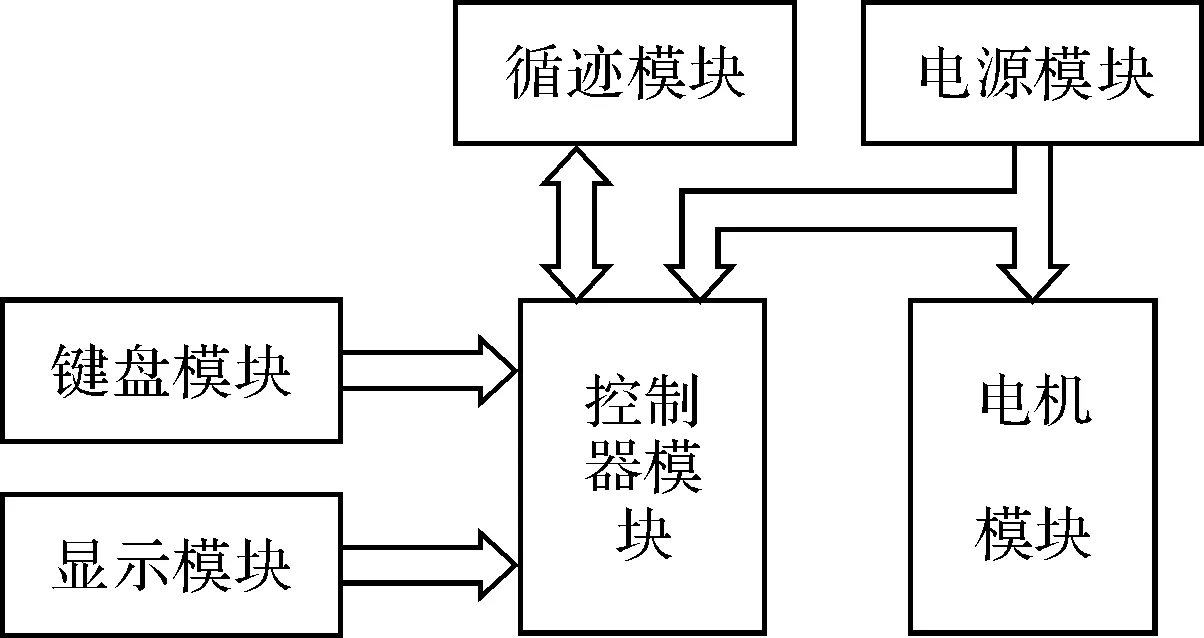
图2 悬挂运动控制系统总体结构框图
控制器模块是整个系统的核心,主要由MSP430F149单片机组成,由键盘输入接受命令。当系统接收到画图命令时,控制器模块调用程序驱动电机来控制悬挂物体的位置,并将此位置坐标在显示模块中显示出来;当系统接收进行寻迹命令,则调用寻迹程序驱动电机,并通过检测寻迹模块中的红外传感器的信号来控制悬挂物体寻迹。
3系统的硬件设计
3.1主控制器的选择
该系统采用TI公司所生产的MSP430F149单片机为主控制芯片,MSP430F149单片机[5]有非常丰富的资源:6个8位并行口,其中两个有中断功能,同时含有12位的ADC,强大的定时器,精密的比较器,大容量的RAM和ROM,存储大容量的程序。MSP430F149单片机最小系统如图3所示。
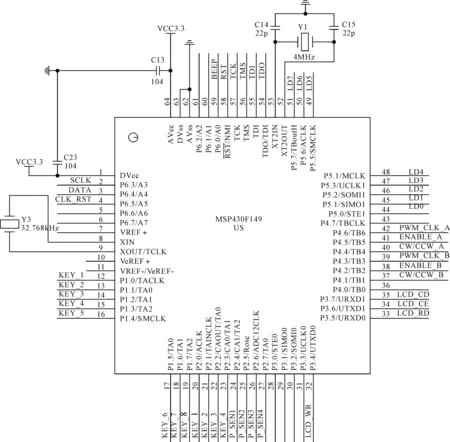
图3 MSP430F149单片机最小系统
3.2循迹模块的设计
循迹模块采用ST198A反射式红外光电传感器,连接如图4所示。其中P SEN为传感器检测准许端,SEN则为检测端。P_SEN为高电平时,发射有电流通过,发出红外光,如此时检测的是白线,光敏三极管接收到红外光,三极管导通SEN拉低为低电平;如检测黑线则SEN为高电平;P_SEN为低电平则会关闭传感器的检测功能,SEN会一直被上拉为高电平。
3.3人机交互显示模块设计
使用的液晶是128*64A显示模块,该模块特点是能够显示图形和汉字,图文并茂,界面良好。具体连接如图5所示。其中D0~D7是数据口,LCD_WR为液晶写信号,LCD_RD是液晶读信号,LCD CE是液晶片选信号,LCD_CD是寄存器选择信号。基于液晶,设计了汉字的人机交互界面,支持多层菜单。结合简单易懂的按键设计,能够容易得到设置运动的参数、坐标,还可以实时显示运动时间和运动的坐标。
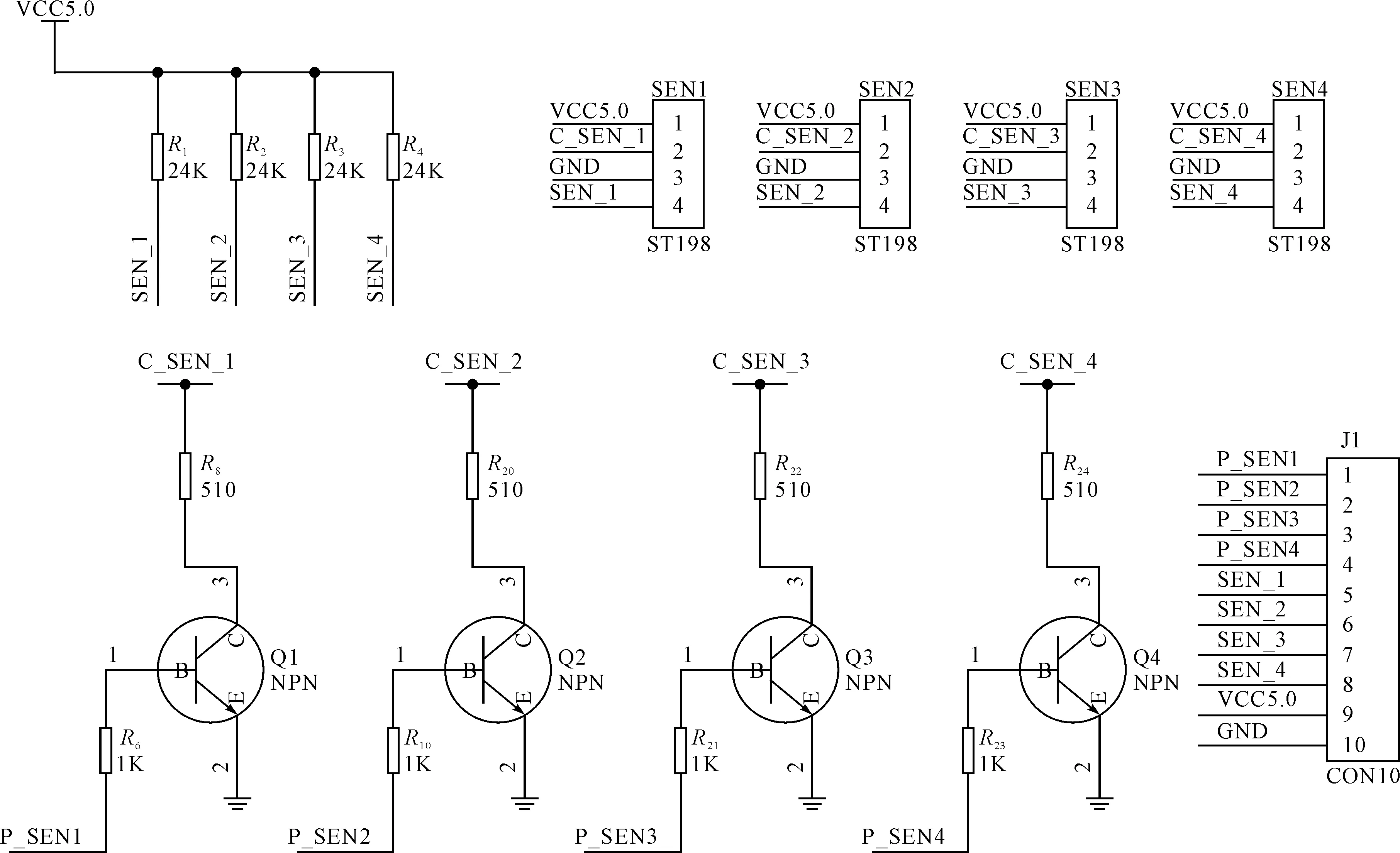
图4 循迹模块电路图
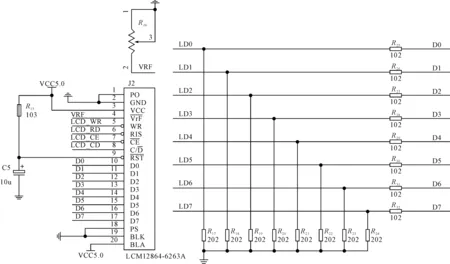
图5 显示模块接线图
3.4电源模块的设计
系统供电采用220V的交流电经适配器转化成12V直流后给系统供电,连接图如图6所示,由于电机的存在,在设计时使用了DC-DC器件实现电路的隔离。具体为U2(7805)将适配器输出的12V转换为5V(MVCC5。0),J3(DC-DC器件)将MVCC5。0转化成L297和L298供电(L298有两路供电,另一路外是适配器直接供的12V)。这样就实现了电源的隔离,提高了系统的稳定性。
3.5电机驱动模块设计
L297是包含环形分配器的控制芯片[6],可以将控制器来的脉冲序列按一定的规律分配,产生步进电机运转所需要的信号。连接方法如图7所示。CLOCK是提供的脉冲,L297将把它的信号分配给A、B、C、D,供后级功放L298放大以驱动步进电机。CW/CCW用于控制步进电机整步还是半步运行(CW时为整步)。ENABLE是L297的使能端。L298是芯片是一种高压、大电流双全桥式驱动器[7],放大L297提供的信号。电路设计如图8所示。其中IN1~IN4分别连接L297的A、B、C、D脚,6、11脚分别接L297的INH1和INH2。二极管的作用是续流,保护前级电路。
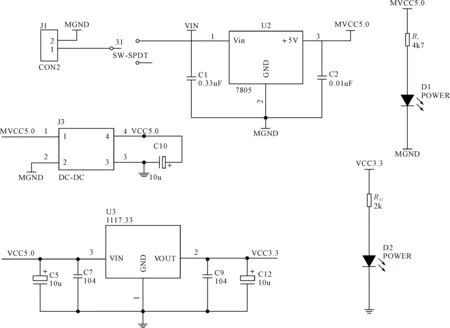
图6 电源模块接线图
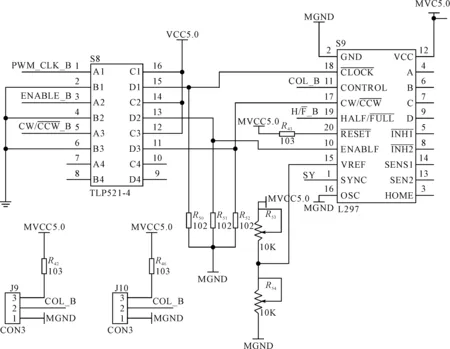
图7 显示模块接线图
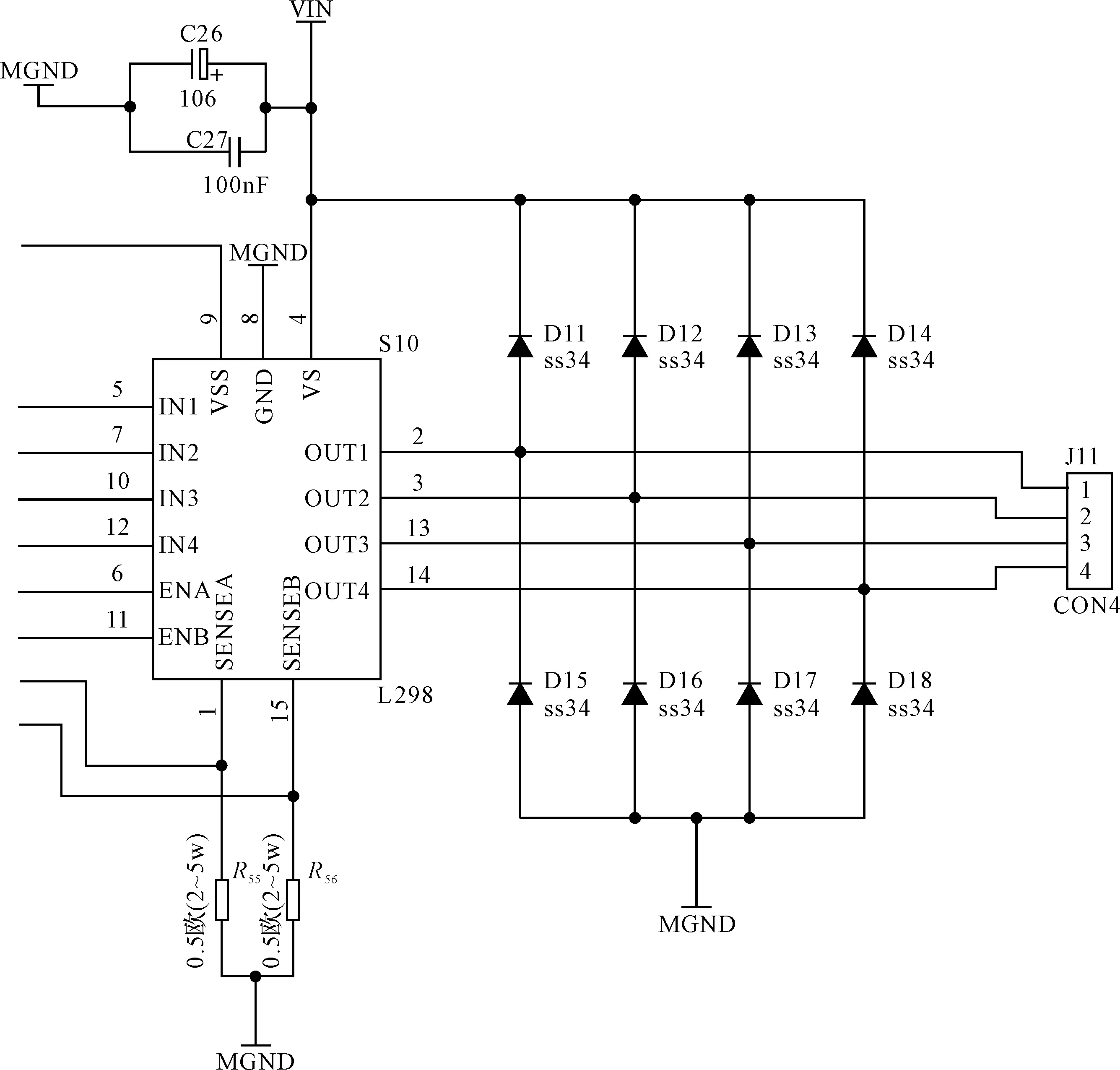
图8 电源模块接线图
4系统软件设计
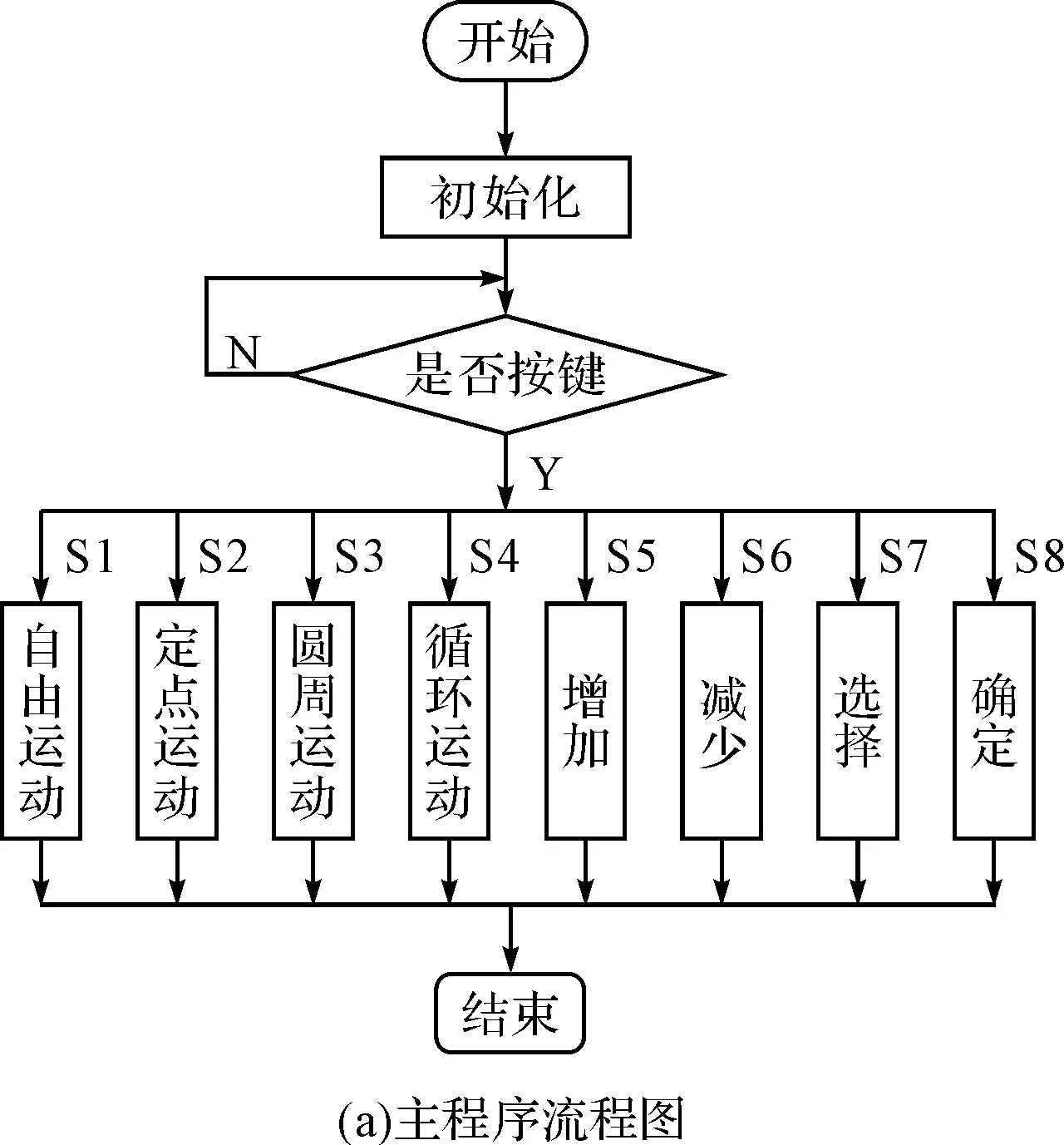
系统的软件分成五个模块,键盘扫描程序[8],画直线程序,画圆周程序,寻迹程序,液晶显示程序。根据键盘输入不同的值单片机执行不同的程序段。其程序流程图[9]如图9所示。
5系统测试与分析
测试该系统使用UT33D型号数字万用表,HY1711-2型稳压电源,YB4320G双踪示波器,秒表和卡尺。
测试可知:可通过键盘设定任意坐标点参数,并在显示屏上显示。能够通过按键功能设置定点运动测试、画圆运动测试、循迹运动测试等。通过键盘设置相关功能,开机运行,测得三次的数据如表1所示,可以看出每一次运行测试,偏差都很小,系统稳定性好,用时较短,系统快速性好。

表1 系统三次测试数据统计表
6结语
本文提出了一种通过MSP430F149单片机[10]控制步进电机来进行对物体的运动控制和精确定位的控制方法。设计了电机驱动模块和人机交互显示模块,通过指令和寻迹模块传感器检测的信号对物体的定位或定轨迹运动进行控制。实际测试表明:该系统具有工作性能稳定、定位误差小、智能化和电路简单可靠等特点,可以应用于港口货物吊运,大厦幕墙清洗等悬挂系统。
参 考 文 献
[1] 郝朝亮,李心田,吴才章,等.悬挂运动控制系统中软件算法设计与综合调试[J].传动技术,2009,23(4):42-44.
HAO Zhaoliang, LI Xintian, WU Caizhang, et al. In suspension kinematic control system the software Design and sythetic testing[J]. Drive System Technique,2009,23(4):42-44.
[2] 沈建华,杨艳琴,翟骁曙.MSP430系列16位超低功耗单片机原理与应用[M].北京:清华大学出版社,2004.
SHEN Jianhua, YANG Yanqin, ZHAI Xiaoshu. MSP430 series 16 bit ultra-low power mircocontroller Principles and Applications[M]. Beijing: Tsinghua University Press,2004.
[3] 王晨光,孙运强,许鸿鹰.步进电机的单片机控制设计分析[J].国外电子测量技术,2008,27(9):39-41.
WANG Chenguang, SUN Yunqiang, XU Hongying. Analyze and design of stepper motor control based on MCU[J]. Foreign Electronic Measurement Technology,2008,27(9):39-41.
[4] 居水荣.单片机开发系统综述[J].半导体情报,2001(2):19-22.
JU Shuirong. Single chip mircocomputer development system werereviewed[J]. Semiconductor Intelligence,2001(2):19-22.
[5] 郭检柟.基于磁阻芯片和MSP430单片机的电子罗盘设计[J].信息与电子工程,2010,8(1):12-14.
GUO Jiannan. Design of digitial compass with magneto resistive chip and the MCU of MSP430[J]. Information and Electronic Engineering,2010,8(1):12-14.
[6] 黄勇,廖宇,高林.基于单片机的步进电机运动控制系统设计[J].电子测量技术,2008,31(5):150-154.
HUANG Yong, LIAO Yu, GAO Lin. Design of stepper motor control system based on microcontroller[J]. Electronic Measurement Technology,2008,31(5):150-154.
[7] 姚营营.基于MSP430单片机的环境监测系统的设计[D].大连:大连交通大学,2010.
YAO Yingying. The design of MSP430 MCU based environmental monitoring instrument[D]. Dalian: Dalian Jiaotong University,2010.
[8] 张毅刚.单片机原理及应用[M].北京:高等教育出版社,1999.
ZHANG Yigang. Priciple of single-chip computer and its application[M]. Beijing: Higher Education Press,1999.
[9] 郭天祥.新概念51单片机C语言教程[M].北京:电子工业出版社,2009:58-65.
GUO Tianxiang. New concept of single chip C language tutorial[M]. Beijing: Electronic Industry Press,2009:58-65.
[10] 吕俊亚.一种基于单片机的温度控制系统设计与实现[J].计算机仿真,2012,29(7):230-233.
LÜ Junya. The design and implementation of temperature controlling system based on signle chip[J]. Computer Simulation,2012,29(7):230-233.
收稿日期:2016年1月7日,修回日期:2016年2月23日
基金项目:西安航空职业技术学院教科研项目(编号:XHZY-2014JC0005)资助。
作者简介:党智乾,男,硕士,讲师,研究方向:计算机测量与控制。
中图分类号TP368.1
DOI:10.3969/j.issn.1672-9722.2016.07.038
Design and Realization of Suspension Control System Based on Microcomputer
DANG Zhiqian
(Department of Automation Engineering, Xi’an Aeronautical Polytechnic Institute, Xi’an710089)
AbstractThis system is consisted by the controlling core of MSP430 MCU, the human interface of a LCD and a keyboard, two step motors for open-loop controlling of the suspended load and a matrix of reflected infrared optic-electronic sensors for feedback of the close-loop tracing to the given curve. Actual tests show that the system has a stable performance characteristics and small positioning errors. It has the prospects of extensive use in modern industry and agriculture.
Key WordsMSP430 MCU, suspension control system, stepper motor, infrared sensor