基于车载激光扫描的城市道路提取方法
2016-08-10张达,李霖,李游
张 达,李 霖,李 游
(武汉大学资源与环境科学学院,湖北武汉430079)
基于车载激光扫描的城市道路提取方法
张达,李 霖,李游
(武汉大学资源与环境科学学院,湖北武汉430079)
针对利用车载激光扫描数据进行道路信息提取的问题,通过分析城市环境中道路与邻近区域点云的高程差异,结合区域生长等图像处理算法,提出了一种城市道路提取方法。该方法算法简单,无需其他辅助数据,利用立得公司提供的两份点云数据进行试验,道路提取结果的正确性、完整性、提取质量都超过97%,对于无固定宽度道路、曲线道路等的适应情况也较好。
车载激光扫描;道路提取;高程梯度特征图像;阈值分割;区域生长
道路信息作为一种重要的基础地理信息,在城市规划、智能交通、应急响应等领域都发挥着重要作用,如何高效率、高精度、低成本地进行道路信息的采集也成为近年来的研究热点[1-4]。车载激光扫描作为一种新的空间数据采集手段,以车辆为搭载平台,集成GPS、INS、激光扫描仪、CCD相机等多种传感器[5],在车辆行进途中实时采集建筑物、植被、道路等地物表面的三维数据,为道路信息的采集与更新提供了新途径。
目前国内外学者针对利用车载激光扫描数据提取道路环境信息展开了广泛的研究,主要包括道路的提取[6-11]、道路交通标线的识别与分类[12-13],以及交通指示牌、路灯等杆状地物的识别与分割[10]等方面。其中,在道路提取方面,文献[6]提出将点云生成高程特征图像后提取路沿石,并利用不规则三角网对路面进行重建的方法,该方法只适用于简单、规则的道路环境;文献[7]利用最大熵模糊聚类的方法将散乱点云排列为扫描线,并从中提取近似水平的长直线作为路面,但当路面有车辆等障碍物时算法的准确性会明显下降;文献[8—9]均基于随机抽样一致性算法(RANSAC)提取路面点云,前者对扫描线进行二次多项式模型拟合,后者对分段后的点云数据进行三维平面拟合,但这类方法的计算效率并不高;文献[10]利用扫描线上激光点的高程、点密度、坡度等空间分布特征,采用移动窗口法对点云滤波后进行道路边界提取;文献[11]根据点云的坡度、回波强度、脉冲宽度等信息生成栅格表面后,将GVF Snake模型和Balloon Snake模型结合来检测道路边界,该方法计算复杂且其准确性有待提高。
针对以上问题,本文通过对城市环境中道路与邻近区域之间的高程差异进行分析,提出了根据点云数据生成高程梯度特征图像后结合区域生长等图像处理算法快速提取城市道路的方法。
一、车载点云的道路提取方法
为了从车载激光点云数据中提取道路,首先对原始数据进行分段预处理,然后利用直方图凹面分析法计算高程阈值对点云滤波。为了提高数据处理的速度并借鉴图像处理领域的成熟方法,本文将滤波后的点云数据转化为二维图像,通过生成的高程梯度特征图像,利用阈值分割、形态学处理、区域生长等方法对道路进行提取和优化,最后反算到点云数据中获取道路点云数据。该方法的具体流程如图1所示。

图1 道路提取流程
1.预处理
随着车载激光扫描技术的发展,其数据精度越来越高,数据量也越来越大,对原始数据直接进行处理会造成计算速度缓慢,而且道路环境复杂,如道路两侧地物类型多、道路形态多变、路面起伏大等,各部分道路特点并不一致,难以构建统一的道路模型,这些都增加了直接处理大范围数据的难度。因此首先利用行车轨迹数据L对道路点云进行分段,道路情况越复杂,分段数越多。如图2所示,以间隔d对行车轨迹线进行等距划分得到一系列分割点,并在各点处分别作L的垂面,利用垂面将道路点云分段,针对各段数据依次处理。
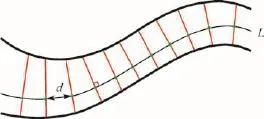
图2 道路点云分段示意图
2.点云高程滤波
(1)点云直方图凹面分析法
Rosenfeld等于1983年提出了一种新的图像分割阈值选取方法——直方图凹面分析法,通过构造包含图像灰度直方图的最小凸多边形确定最佳分割阈值[10]。该方法不仅可在直方图为双峰的情况下合理选取阈值,同时也可处理单峰、多峰等情况,是一种更为理想的基于灰度直方图的阈值选取方法。
本文在该方法基础上提出点云直方图凹面分析法。首先针对扫描点的某一特征属性F,如高程值、激光扫描强度等,以w为组距绘制特征属性的频数分布直方图hs(如图3所示),组数为n,各个矩形依次编号为i=0,1,…,n

对于第i个矩形,其上边中点横坐标为特征属性值fi,纵坐标即矩形高度为hi

构造包含点(f1,0)、(fn,0)及所有矩形上边中点(fi,hi)在内的最小凸多边形HS,Hi为凸多边形上与属性值fi对应的高度,定义Di为直方图的凹面深度
在点云的特征属性频数直方图中,凹面深度越大的位置,其两侧对象的特征属性差异越大,因此当Di取得局部最大值时得到点云分割阈值T T=fi, 当Di=Dmax
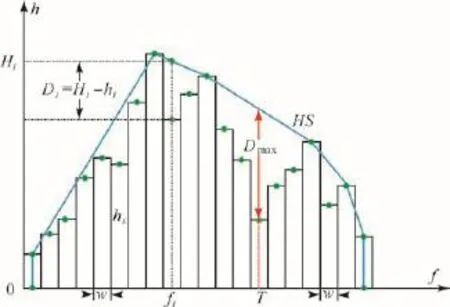
图3 直方图凹面分析法
(2)高程滤波
由于道路环境复杂,道路两侧的行道树、路灯、交通指示牌等对路面的准确提取造成困难,如将点云向水平面投影时树冠对道路边界等可能有遮挡,因此有必要对点云进行高程滤波。
分段后的各段道路路面都比较平坦,根据道路点云的分布规律,可知路面点的数量多且高程值变化较小,如图4(c)所示,对应于直方图中的波峰,树木等干扰地物的点云高程整体大于路面,且其高程值分布分散,对应于波峰右侧的肩部,据经验可知高程分割阈值应位于该肩部部分。
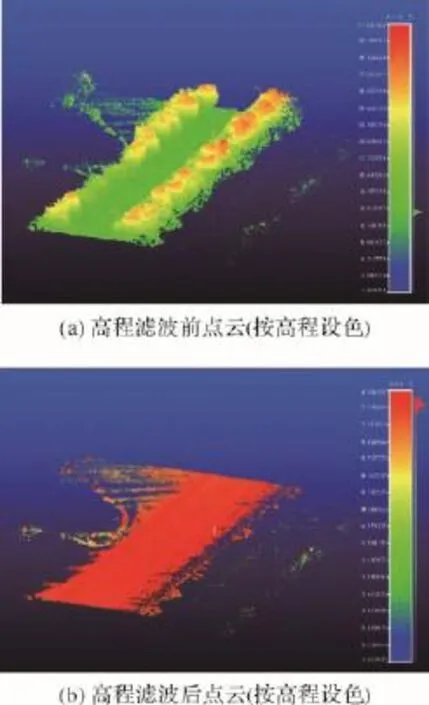
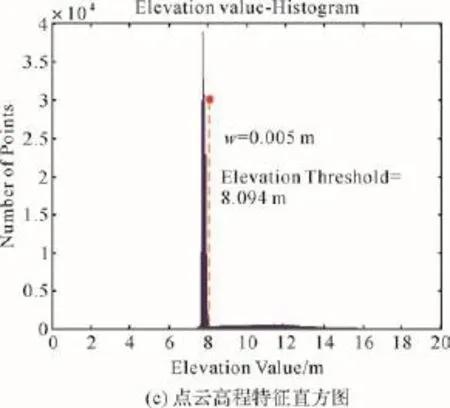
图4 点云高程滤波示例
直方图凹面分析法对于这种单峰直方图分割效果较好,因此本文采用该方法选取高程分割阈值。令频数最大值对应的高程值为hf,扫描点最大高程值为hmax,利用点云直方图凹面分析法在[hf,hmax]范围内选取分割阈值T,并保留高程值小于T的点云,如图4所示,即可去除绝大部分非路面点。
3.高程梯度特征图像
(1)道路的高程梯度特征
在大多数道路环境中,路面较为平坦,道路边界处存在高程跃阶,如图5所示。根据道路设计规范,路面与两侧人行道等的高程差一般为10~25 cm。标量场中的梯度反映了该标量的变化率,路面的高程变化远小于道路边界,因此选择高程梯度衡量道路的平坦程度并作为后续提取路面的判断指标。
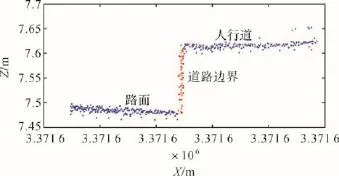
图5 道路点云剖面图
(2)高程梯度特征图像的生成
首先将点云向XOY平面投影并格网化(如图6所示),格网间隔为R,利用各格网内的点进行反距离权重插值计算出格网中心点的高程值后,由于部分格网中可能无扫描点分布,因此需再对格网进行双线性插值,然后将其归一化得到灰度值并生成高程特征图像I,最后依据式(1)由高程图像I得到梯度图像G,如图7(a)所示。

图6 格网示意图

图7 高程梯度特征图像示例

(3)阈值分割与形态学处理
由于道路路面与边界的高程梯度之间有较大差异,故设置阈值TG对高程梯度图像进行二值化处理,将像素值大于TG的格网灰度设为1,反之为0,阈值根据经验获取,结果如图7(b)所示。为了填补边界上存在的孔洞或间断,使其可以将路面区域完整包围在内部,利于后续的区域生长等操作,笔者采取图8中的结构元素对二值图像进行膨胀处理,结果如图7(c)所示,白色道路边界明显,其包围的中央黑色区域即为路面,实现了边界与路面的分类。

图8 膨胀结构元素
4.道路区域生长
任取行车轨迹数据上一点,确认其对应于二值图像中的格网像素值为0后,以该格网作为种子点进行区域增长。区域增长的方法过程如下:从已提取的种子点开始,搜索其8邻域范围的像素,如果可以满足局部一致性的生长条件,即像素值也为0,则将该像素作为增长之后的区域,并作为新的种子点按照上述方法继续进行搜索,直到没有点满足条件,生长停止。该方法利用路面与边界之间的梯度差异简单快速地实现了路面区域的分割。
在之前对二值图像膨胀处理时,道路边界的膨胀造成了生长后路面边缘部分的缺失,为了优化分割结果,采用图8中的结构元素对提取到的路面进行膨胀处理,两次膨胀处理可以使分割误差最大限度被抵消。根据优化后的路面分割图像结果即可反算得到道路点云数据。
最后,由于车辆或行人的遮挡,导致路面上还存在孔洞,填补方法为:根据高程特征图像对孔洞所在格网进行高程及点密度两方面的二次插值处理,利用插值结果在各个格网范围内随机生成扫描点,各点高程相同且设置为插值后的高程值,扫描点的数量则取决为插值后的点密度值。经过填补对道路点云提取结果实现了进一步优化。
二、试验及分析
1.试验数据
本试验采用立得公司采集于武汉城区的两份数据。数据1的扫描范围大致为950 m×750 m,道路为弯曲道路,路面起伏较大,道路宽度较为一致,总长约为1150 m,共45 175 747个数据点;数据2的扫描范围大致为780 m×300 m,道路平直但其不同路段的宽度变化较大,总长约为1000 m,共30 932 941个数据点。两段数据中都包含大量行道树、路灯、电力线、车辆等地物。
2.试验结果
根据道路复杂程度不同分别对两份数据设置50 m、30 m的间隔分段,再利用直方图凹面分析法对各段点云的高程进行分析并获取阈值,完成高程滤波后生成高程梯度特征图像。格网的大小是生成图像的重要参数,格网过小时部分格网内没有点或点数太少,高程梯度图像中路面噪声明显;格网过大则分辨率降低。为了选取合适的格网大小,对两份数据分别抽取部分样本数据进行试验,以数据1中样本为例,以0.05、0.07、0.09、0.11 m的间隔生成4幅高程梯度特征图像(如图9所示),经对比发现格网大小为0.09 m时图像质量最高,因此确定格网大小为0.09 m,同理选取数据2的格网间隔为0.15 m。

图9 格网大小的确定
利用高程特征图像生成梯度图像后应选取合理的梯度阈值进行二值化处理。在高程梯度图像中,路面较为平坦,灰度值一般在0~0.005之间,而边界处灰度值通常大于0.015,因此选取0.005作为阈值,该参数对于两份数据均适用。
最终,依据本文的方法,结合上述参数设置,对数据处理后得到的道路提取结果如图10所示。
3.试验结果分析
为了对试验效果进行评估,笔者手工提取了道路点云作为参考数据,并通过文献[15]中的方法计算道路提取的正确性p、完整性r和提取质量q作为评价指标,公式如下

式中,TP是试验中正确检测出的路面点个数;FP是检测错误的路面点个数,即不属于路面但被归类为路面点的个数;FN是未检测出的路面点个数,即属于路面但被归类为非路面点的个数。

图10 道路提取结果
对两份数据的试验结果分别进行分析,结果见表1。通过以下数据可知,道路提取的结果较好,两份数据的正确性、完整性及提取质量都超过了97%,绝大多数道路都被正确提取。
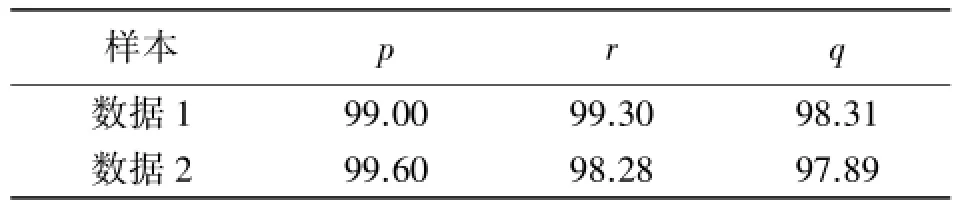
表1 试验结果分析 (%)
三、结束语
本文以车载激光扫描数据为研究对象,通过分析道路与邻近区域点云的高程差异,提出了利用点云生成高程梯度特征图像,并结合阈值分割、区域生长等方法获取道路点云,探索出了一种适合城市环境中快速提取道路点云的方法。
该方法算法简单,无需其他辅助数据,而且通过借鉴图像处理中的方法,避免了大量的几何计算,提高了数据处理效率。笔者利用立得公司提供的点云数据对该方法进行了试验验证,在无固定宽度道路、曲线道路等复杂情况下,道路提取的正确性、完整性、提取质量等都较好。
后续的研究工作将以本文研究为基础,利用该方法提取的道路数据,进一步研究道路交通标志与标线的提取。
[1] MIAO Zelang,WANG Bin,SHI Wenzhong,et al.A Semi-automatic Method for Road Centerline Extraction from VHR Images[J].Geoscience and Remote Sensing Letters,2014,11(11):1856-1860.
[2] CHEN Hao,YIN Lili,MA Li.Research on Road Information Extraction from High Resolution Imagery Based on Global Precedence[C]∥ 2014 3rd International Workshop on Earth Observation and Remote Sensing Applications(EORSA).Changsha:IEEE,2014:151-155.
[3] XU S,VOSSELMAN G,ELBERINK S.Multiple-entity Based Classification of Airborne Laser Scanning Data in Urban Areas[J].ISPRS Journal of Photogrammetry and Remote Sensing,2014(88):1-15.
[4] HU Xiangyun,LI Yijing,SHAN Jie,et al.Road Centerline Extraction in Complex Urban Scenes from LiDAR Data Based on Multiple Features[J].IEEE Transactions on Geoscience and Remote Sensing,2014,52(11):7448-7456.
[5] 杨必胜,魏征,李清泉,等.面向车载激光扫描点云快速分类的点云特征图像生成方法 [J].测绘学报,2010,39(5):540-545.
[6] JAAKKOLA A,HYYPPA J,HYYPPA H,et al.Retrieval Algorithms for Road Surface Modelling Using Laser-based Mobile Mapping[J].Sensors,2008,8(9): 5238-5249.
[7] YUAN Xia,ZHAO Chunxia,CAI Yunfei,et al.Roadsurface Abstraction Using Ladar Sensing[C]∥Proceedings of 10th International Conference on Control,Automation,Robotics and Vision.Hanoi:IEEE,2008: 1097-1102.
[8] SMADJA L,NINOT J,GAVRILOVIC T.Road Extraction and Environment Interpretation from Lidar Sensors [J].IAPRS,2010(38):281-286.
[9] WANG Hanyun,CAI Zhipeng,LUO Huan,et al.Automatic Road Extraction from Mobile Laser Scanning Data [C]∥Proceedings of 2012 International Conference on Computer Vision in Remote Sensing(CVRS).Xiamen: IEEE,2012:136-139.
[10] 方莉娜,杨必胜.车载激光扫描数据的结构化道路自动提取方法[J].测绘学报,2013,42(2):260-267.
[11] KUMAR P,MCELHINNEY C,LEWIS P,et al.An Automated Algorithm for Extracting Road Edges from Terrestrial Mobile LiDAR data[J].ISPRS Journal of Photogrammetry and Remote Sensing,2013(85):44-55.
[12] GUAN Haiyan,JONATHAN L,YU Yongtao,et al. Using Mobile Laser Scanning Data for Automated Extraction of Road Markings[J].ISPRS Journal of Photogrammetry and Remote Sensing,2014(87):93-107.
[13] YANG Bisheng,FANG Lina,LI Qingquan,et al.Automated Extraction of Road Markings from Mobile LiDAR Point Clouds[J].Photogrammetric Engineering&Remote Sensing,2012,78(4):331-338.
[14] LEHTOMAKI M,JAAKKOLA A,HYYPPA J,et al. Detection of Vertical Pole-like Objects in a Road Environment Using Vehicle-based Laser Scanning Data[J]. Remote Sensing,2010,2(3):641-664.
[15] WANG Hanyun,WANG Cheng,CHEN Yiping,et al. Extracting Road Surface from Mobile Laser Scanning Point Clouds in Large Scale Urban Environment[C]∥2014 IEEE 17th International Conference on Intelligent TransportationSystems(ITSC).Qingdao:IEEE,2014:2912-2917.
Urban Roads Automated Extracting from Mobile Laser Scanning Point Clouds
ZHANG Da,LI Lin,LI You
10.13474/j.cnki.11-2246.2016.0218.
P237
B
0494-0911(2016)07-0030-05
2015-08-10
国家863计划(2013AA12A202)
张 达(1992—),女,硕士生,主要研究方向为车载激光扫描数据处理。E-mail:zhangda_whu@163.com
李 霖
引文格式:张达,李霖,李游.基于车载激光扫描的城市道路提取方法[J].测绘通报,2016(7):30-34.
