高精度智能导航数据评价系统的设计与实现
2016-08-10杨军星
姜 浩,黄 鹤,2,赵 焰,杨军星
(1.北京建筑大学测绘与城市空间信息学院,北京100044;2.现代城市测绘国家测绘地理信息局重点实验室,北京100044)
高精度智能导航数据评价系统的设计与实现
姜浩1,黄鹤1,2,赵焰1,杨军星1
(1.北京建筑大学测绘与城市空间信息学院,北京100044;2.现代城市测绘国家测绘地理信息局重点实验室,北京100044)
自动驾驶技术的兴起对高速公路上导航地图的精度要求越来越高,需要对车载移动测量系统获取的导航数据产品精度作出合理评价。本文以某段高速公路为例,提出了数据验证分类和详细精度性能评价指标,探讨了导航数据管理和三维可视化分析系统的设计与实现方法,对以后建立完善的高精度导航产品评价体系及全国范围内导航数据产品精度验证的过程具有一定参考价值。
导航数据产品;精度评价指标;高速公路;自动驾驶;移动测量系统
伴随汽车产业的快速发展,汽车智能化、自动驾驶及无人驾驶成为未来汽车领域的发展趋势,而高精度智能导航数据作为汽车驾驶环境的重要组成部分,可以用来提示汽车的行驶方向和路况信息,扮演着汽车智能化发展的核心角色[1]。
目前利用车载移动测量系统收集导航数据,可实现全自动、高精度、360°全方位地理信息采集,改善传统城市测绘人工费时费力的现状,极大提高数据采集效率[2]。其导航数据需精确采集车辆行驶路线的基本车道及沿边特征物的空间位置、几何大小等参数,如高速路上标牌的形状、立柱的粗细、车辆通过桥梁的高度和角度、高速弯道及匝道口的曲率大小。生产出的地图数据包含支持ADAS功能的道路形状、拓扑和其他高级属性,同时将汽车位置与地图上即将驶入路段匹配,分析前方公路状况,提供信息预报,在危险发生前辅助驾驶员操作,让驾驶变得更加安全和舒适。
产生的大量导航数据产品精度对于后期制作导航地图至关重要,因此如何验证其精度成为一个难题,仅依靠人工运算难以在短时间内完成并保证准确性。为了验证大量导航数据产品的精度,本文以验证高速公路上常见特征物作为导航数据的精度为例,设计出一套评价系统,在提出数据管理分类和精度性能评价指标的基础上,系统可进行三维可视化对比分析并输出验证值(导航数据产品)的精度评估结果。
一、导航数据组织与管理
1.标准数据采集过程
该项目研究区域选取某段高速公路沿边部分特征物来进行精度评价。利用车载移动测量系统提前快速获取研究区域的导航数据,对于其可靠性如何,以及能否用在未来的导航地图中,需要后期通过GNSS RTK和免棱镜全站仪组合的测量方式来获取高速路上若干特征点的WGS-84坐标[3],将这部分数据作为验证过程中的标准数据,验证导航数据中特征物的位置、形状、匝道口的曲率和坡度等要素的精度大小。
2.数据分类
在高速公路沿边状况的分析中,选取的特征物基本分为两大部分[4]。把公路周边的特征物定为对象属性,公路自身状况定为道路属性。具体验证内容分别是标牌、立柱、护栏、桥面、匝道口曲率、匝道口坡度、高速出入口斑马线等,分类如图1所示。

图1 验证数据分类
3.数据三维展示
对于上述导航数据产品精度评价需要结合具体情况来分析。数据精度验证时,需要将待计算导航数据和标准数据的共同点从特征物中提取出来,保证产品点位坐标和全站仪获得的坐标在同一坐标系下,如WGS-84或1954北京坐标系[5]。在传统点云数据共同点精度验证方案中,首先选择某试验区域中几十个特征点,将全站仪获得的坐标当作真值,点云数据当作验证值,在Excel或其他工具里代入公式计算,大多数情况下只能以数值形式得出单点点云空间位置上的点位误差[6]为

平面位置误差为
中误差为
式中,n为个数;Δ为验证值与真值的差。
本文在上述精度验证的基础上,开发出一套三维可视化界面,采用人机交互方式,方便用户通过不同视角、不同方式来查看数据,观察验证值和真值在模拟出实物情况下的对比情况,避开大量繁杂的数据显示,形象直观地显示出对比结果,并可以生成Excel格式文件及各种数据曲线图格式的数据评估报告。
二、导航数据精度评价体系
1.精度性能评价指标
系统对这部分高速公路涉及的特征物数据精度验证进行分类分级处理,按照项目要求,对这些特征物提出具体的性能指标分类与分级。考虑需要验证一系列特征物在WGS-84下的相对空间位置和其自身形状大小等物理属性,将大类分为空间指标和几何指标,每一大类下面依次分为一级指标、二级指标、三级指标。本次项目中三级指标分类已经可以满足产品验证的目的,部分指标仅下分到一级,后期可以适当增加分析类别,完善精度验证的指标评价种类,具体设计见表1。
2.数据特征物编码分类
系统所涉及的高速公路上各种特征物要素均需要进行组织和管理。然而目前国家在高速公路导航数据要素的分类上没有形成统一标准,因此,本文参考地理信息要素的分类与代码的国家标准,同时结合本项目实际情况,设计出相应数据的组织形式和特征物分类编码[7]。

表1 精度性能评价指标
综合考虑本项目待验证特征物的数量、分布、类别等因素,为方便软件数据库载入过程及内部算法实现,制定一套编码规格,将其依次分为4类:点位命名、特征物类别、特征物ID、特征物编号,按照线性排列共有8位,以字母开头,其余7位采用十进制数字码,具体代码组织形式如图2所示。

图2 编码规格
1)左起第1位为点位命名,如T代表特征点,以汉字首字母为命名规则。
2)左起第2、3位为特征物类别,如01代表标牌、02代表立柱、03代表护栏等。
3)左起第4、5位为特征物ID,在特征物类别基础上细分形成的类别,如标牌中01代表方形、02代表圆形,其余同理。
4)左起第6、7、8位为特征物编号,在特征物相同类别基础上,依次为每一个特征物命名,编号范围0—999。
如本系统中数据输入标准格式分类代码T0101001,代表本项目高速公路第一个方形标牌上的特征点,整理效果如图3所示,其中数据为试验数据。
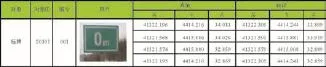
图3 方形标牌分类编码
三、系统的设计与实现
本系统采用C#开发语言,开发环境为Microsoft Visual Studio 2010,借助Developer Express V2010开发系统的界面控件,以sqlite作为大量导航验证数据的存储基础,整体采用C/S架构。系统主界面如图4所示。
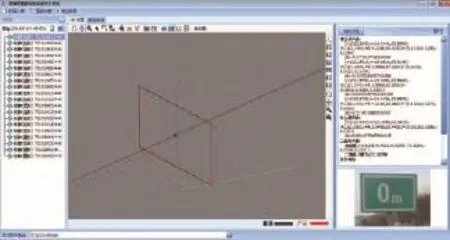
图4 系统主界面
1.系统框架设计
本系统的目的是建立一个验证高速公路上标准特征物作为导航数据的精度的平台。系统主要由数据管理分类模块、三维可视化分析模块、后台辅助模块构成,其总体框架如图5所示。

图5 系统总体框架
(1)数据管理系统
将前期特定高速公路上所采集的一系列特征物测绘数据整理分类及编码入库,不同特征物的精度评价指标与其对应。可以实现随时查看每类特征物的验证值数据和真值数据、特征物数据的采集时间和地点。及时进行对每个对象的属性信息修改、数据备份、数据维护等操作。
(2)三维可视化系统
将特征物三维数据在特定的坐标系下生成虚拟图形并展示,让用户对不同数据下形成的特征物有一个直观比较,避免传统精度验证中海量数据产生的以数值形式且让人眼花的精度对比结果。在三维可视化窗口中,用户可以实现图形的添加、删除、平移、旋转等操作,可采用不同的查看视角(透视图、平视、顶视),可以自定义信息标注、信息查询方式等。选择精度计算的误差范围和对应的性能评价指标,以满足用户的精度评价成果输出需求。
(3)后台辅助系统
实现管理员和用户的不同权限分配管理,保证系统可以正常运行,维护信息的安全性和可靠性,同时进行日志监控和恢复等。提供软件使用帮助说明,提供关于当前高速公路信息的友情链接,如百度地图上相应路段的街景状况。
2.关键技术实现
系统的开发过程需要针对不同特征物设计特定的算法,涉及空间几何学、线性代数和测量平差等知识,才能实现合理的精度分析。不同于以往数据分析只在表格中表达结果,软件通过算法在三维可视化窗口生成图形轮廓,方便用户分析数据精度。以下分别列举本次项目中几种典型特征物的算法实现思路。
(1)非圆形标牌模型生成
针对非圆形标牌的4个角点数据,需要在三维坐标系下生成空间平面四边形,进而分析其精度性能指标。理论上,4个角点的数据应该在同一个平面上,而由于测量中偶然误差的存在,使得展点结果并不在一个平面上,需要将它们拟合在同一平面里,主要算法[8]叙述如下。
空间平面一般方程表达式为
其矩阵形式为

求出具体解A、B、C并代入平面方程中,即得拟合平面。分别将4个角点投影到此平面中,依次连接形成空间平面四边形,效果如图6所示。图中利用产品数据和真值数据分别生成2个方形标牌虚拟图形。

图6 非圆形标牌对比效果
(2)圆形标牌模型生成
针对圆形标牌的10个边缘点数据,需要在三维坐标系下生成空间平面圆形,进而分析其精度性能指标。先利用数据点拟合出相应平面,然后将数据点投影到拟合面上,将三维问题转化成二维问题,利用常规的二维平面拟合圆方法[9],主要公式为

式中,(x0,y0)为圆心坐标;R为圆半径;vi为各点到圆心距离与半径R的距离差值。
将参数的近似值(x0,y0,R0)代入上式得误差方程为

矩阵形式为
圆心坐标的近似值根据各点求平均坐标获得,半径近似值取1,根据约束条件,多次迭代直至δX收敛,便得到未知数的解,最终得到三维空间圆,效果如图7所示。图中利用产品数据和真值数据分别生成2个圆形标牌虚拟图形。
(3)立柱中心点
如图8所示,针对高速公路上立柱中心点的三维坐标不能通过全站仪直接观测测量,利用软件后期计算生成,其思路叙述如下。
由外业数据可知A、B两点坐标,A点为测站点,B点为全站仪目镜中水平十字丝与立柱表面交线的中点坐标,立柱半径R通过人工测量获得。立柱中心点坐标(Xo,Yo,,Zo)的计算公式为

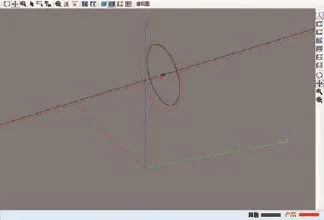
图7 圆形标牌对比效果

图8 计算立柱中心点坐标
(4)曲率模型生成
针对高速公路匝道口曲率模型的生成问题,需要提前在特定道路上每隔一小段距离采集特征点数据。欲计算匝道口的缓和曲线上任意一点的曲率P,选取P点前后n个相邻点,通过高次多项式拟合出曲线方程,再通过曲率公式求出对应曲率,曲线模型如图9所示[10]。

图9 道路曲线对比效果
四、结束语
在对高精度导航地图的需求日益增多的背景下,大量导航数据产品的精度需要得到可靠性验证。本文在数据处理方面提出了评价分析方案,制定了评价体系和方法,通过系统实现对高速公路上常见特征物具体精度的分析过程,在空间指标和几何指标方面给出了数据精度评价结果,并在三维可视化窗口中向用户展现;同时实现各种三维操作、属性修改等功能,在快速、准确验证导航数据产品精度上有一定应用价值。在以后的开发工作中,需加强在人机交互方面的功能,对高速公路上其余特征物的模型建立和精度分析方案设计仍需要进一步完善。
[1] 张栋海,韩丽华,肖雄兵,等.导航地图发展现状和趋势分析[J].地理信息世界,2013,20(2):20-23,36.
[2] 麦照秋,陈雨,郑祎,等.IP-S2移动测量系统在高速公路测量中的应用[J].测绘通报,2010(12):23-26.
[3] 胡友健,罗的,曾云.全球定位系统(GPS)原理与应用[M].武汉:中国地质大学出版社,2003.
[4] KICHUN J,MYOUNGHO S.Generation of a Precise Roadway Map for Autonomous Car[J].IEEE Transactions on Intelligent Transporlation.Systems,2014,15(3):925-937.
[5] 李永强,盛业华,刘会云,等.基于车载激光扫描的公路三维信息提取[J].测绘科学,2008,33(4):23-25,41.
[6] 张卡,盛业华,叶春,等.车载三维数据采集系统的绝对标定及精度分析[J].武汉大学学报(信息科学版),2008,33(1):55-59.
[7] 杨乃,李悦康,陈玉成.室内地理信息系统的设计与实现方法[J].测绘通报,2014(7):109-112.
[8] 欧江霞,李明峰,王永明,等.基于稳健加权总体最小二乘的点云数据平面拟合[J].大地测量与地球动力学,2014,34(3):160-163.
[9] 潘国荣,谷川,施贵刚.空间圆形物体检测方法与数据处理[J].大地测量与地球动力学,2007,27(3): 28-30.
[10] 秦方方,易思蓉,杨长根.基于三次样条曲线的铁路既有曲线整正方法[J].中国铁道科学,2010,31(2):18-23.
Design and Implementation of Evaluation System for High Accuracy and Intelligent Navigation Data
JIANG Hao,HUANG He,ZHAO Yan,YANG Junxing
10.13474/j.cnki.11-2246. 2016.0233.
P208
B
0494-0911(2016)07-0098-05
2016-05-25
中国住房和城乡建设部科学技术项目(2015-K8-050)
姜 浩(1991—),男,硕士生,研究方向为大地测量与测绘工程、地磁室内定位。E-mail:342316059@qq.com
引文格式:姜浩,黄鹤,赵焰,等.高精度智能导航数据评价系统的设计与实现[J].测绘通报,2016(7):98-102.