基于Matlab平台的遥感图像变化检测算法改进策略
2016-08-10张嵘
张 嵘
(天津市勘察院,天津300191)
基于Matlab平台的遥感图像变化检测算法改进策略
张嵘
(天津市勘察院,天津300191)
利用多源遥感影像获得变化的地物信息的过程称为变化检测。变化检测的方法多种多样,由影像分析的层次不同分为像素级的变化检测、特征级的变化检测和目标级的变化检测3种类型;由不同的数据分析机理,变化检测又可分为非监督类变化检测和监督类变化检测。试验证明,基于边缘特征与灰度差值法相结合的变化检测试验更适用于基于Matlab平台的遥感图像变化检测。
图像处理;图像阈值分割;变化检测;算法研究
随着科学技术的不断进步,人类对于自然界的认识不断加深,利用资源及改造自然的能力有了很大的提升。多时相数据是指在不同时间获取的同一地区的一组影像、地图或其他地理数据。借助遥感技术可以实现按照设定的固定周期,对地球表面同一位置进行重复跟踪访问,且能够提供不同分辨率的图像,从而能够提供多时相遥感影像数据,通过遥感技术获取影像资料是环境监测、资源变化研究的一个重要手段。
一、变化检测基本方法研究
1.遥感变化检测技术方法概述
1)直接比较法。直接比较法是指在分类之前直接对多时像的遥感光谱进行全面分析,通过相关信息确定引起光谱变化的主要因素,然后采用人工计算形式分析光感变化过程。
2)分类后比较法。本文在利用分类方式对影像加以分类后,通过使用分类后比较法,从中得出信息变化检测的变化规律。
2.遥感变化检测的基本流程
虽然目前遥感技术已经较为成熟,精细程度也有了显著提高,传感器在生产中的作用越来越重要,然而,它还是会受到外界因素的干扰。变化检测的目的是要在诸多不确定因素中正确检测出变化区域的完整信息,为了达到这一要求,变化检测需要经过一系列的流程操作,大体由4部分组成:数据信息的获取、图像处理、信息变化检测及精细度划分。笔者选择的是预处理后的图像检测方式,因此本文将重点放在了变化检测图像预处理之后几个步骤上,即图像变化信息提取与分析、变化检测精度评估。
(1)遥感图像变化检测
遥感图像的变化检测主要分为两个阶段:第一阶段是变化信息提取,主要是采用特定的方法从多幅不同时相的影像中提取具体的变化信息;第二阶段是对图像变化信息进行分析,主要是根据前面提取到的数据进行分析,为接下来的二次分析创造条件。
(2)检测精确度的判断
遥感图像变化检测精度的确定对于整个检测来说也是非常关键的,对于变化检测工作来说,其结果具有可评估性。由于实际操作过程中诸多变化信息的获取都存在诸多困难,导致检测精确度的判定工作变得很复杂。另外,对精确度进行判断的过程中,还存在外部因素的干扰,且不同检测方式的结果也不同。现阶段,目视评估法是相关研究领域使用平率最高的检测方式,但是该方式的精确度有待提高。
3.阈值确定方法
阀值和检测结果之间具有密切的联系。从现有的研究资料来看,大多数研究人员都是借助人工分析的方式来确定阀值的。笔者认为,在特定条件下,要确定准确的阀值,应当将元灰度值控制在0左右,当元灰度值发生改变时,所形成的数据都是变化检测数据的记录范围。本文对当前的发展状况进行了全面分析,指出在获取全面的图像信息资料之后,可以进一步对变化信息和非变化信息作进一步的划分,以这个标准为依据,完成以下过程:
1)根据图像变化范围,确定灰度值的大小。
2)根据灰度值大小,计算变化类与未变化类所占比例的高低。
3)相对于图像2的图像1变化及相对于图像1的图像2变化是图像变化的两种主要形式。为了确保检测的全面性,在上述操作的基础上,设定具体的阈值。
二、试验结果及分析
1.试验结果评估方法
评估试验结果采用直接目视评估法,即用眼睛对比,通过比较原图像与检测结果的重复率来进行评估;同时还可以通过漏检率和虚检率等其他相关定性的指标进行特定衡量。其中漏检率的检查重点是变化和未变化两个方面,描述的内容是没有被检测出的变化信息量占实际变化信息量的权重;虚检率描述的内容是检测结果中伪变化信息量所占的权重,也就是“伪变化”所发生的概率。
2.试验数据
本文所使用的原始图像是SPOT卫星分别于1987年和1992年拍摄的全色波段相同地区多源头的遥感影像,其中图像的大小尺寸是512×512像素,同时该遥感图像是经过相应预处理后所得到的,如图1所示。文中所有试验都基于 Matlab平台进行。

图1
在进行该部分试验时,首先需要将图像进行傅里叶变换;其次,需要设计特定的高斯低通滤波器处理,同时将处理后的结果通过反傅里叶方法进行不同的变换,得到平滑去噪后的图像;然后对其进行灰度差值运算,得到灰度差值图像如图2所示,图3为所得到的计算不同差值的滤波图像的不同灰度分布情况;最后,通过本文中介绍过的阈值方法处理所要分析的图像(如图4所示),即为最后获得的检测结果。

图2 参考变化图

图3 差异图

图4 4种阈值分割算法结果
三、试验方法及结果分析
1.几种阈值分割方法试验及结果分析
检测差异图像的灰度直方图可以看出其呈双峰,因此由贝叶斯理论推导出的最小错分概率分类阈值可以考虑。检测结果如图5—图6所示,精度评估见表1。
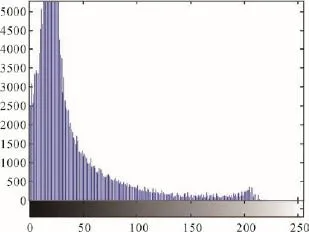
图5 差异图的灰度分布

图6 变化检测结果

表1 几种阈值分割算法精度评估 (%)
2.基于PCNN的影像回归变化检测试验及结果分析
1)假设多源遥感影像之间呈线性关系,通过最小二乘法来进行回归,图7为1992年SPOT卫星影像图回归后图像。
2)求出两时像遥感影像的回归残差图像,从而减弱多时相数据中由于大气条件和太阳高度角的不同所带来的不利影响,图8为回归残差图像。
3)采用PCNN算法对残差图像进行分割。
4)对残差图像进行数学形态运算,结果如图9所示,再使用PCNN自动波正向传播进行滤波,结果如图10所示。
本文算法精度评估结果见表2。

图7 回归影像

图8 回归残差图

图9 分割后二值图像
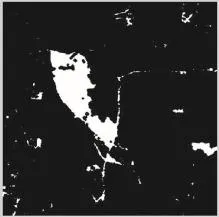
图10 PCNN自动波正向传播后图像

表2 本节算法精度评估 (%)
3.灰度差值与纹理差值的融合算法试验及结果分析
1)为保证处理速度,先将图像压缩量化为16级,使用一个3×3的窗口进行计算。
2)计算每一窗口下距离为1,角度分别为0、45°、90°、135°的4个灰度共生矩阵。
3)计算每一灰度共生矩阵的特征值,为简洁起见,本文只求取图像熵的特征值。将该窗口的熵特征赋值给窗口下图像的中心像素,窗口依次在图像上平移,从而得到整幅图像的纹理特征图像。进而得到两幅不同时相图像的纹理差值图像,如图11所示。

图11 纹理差异图
4)计算图像的灰度差值图像,采用合适的阈值分割方法分别对纹理差值图像和灰度差值图像进行分割,该部分采用的是最大类间差阈值分割方法,最后将两幅二值图像进行融合,得到图像如图12所示。
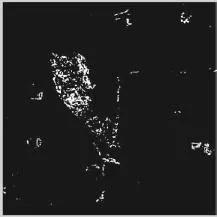
图12 变化检测结果
4.基于边缘特征与灰度差值法相结合的变化检测试验及结果分析
具体的实现过程如下:
1)边缘特征提取。用Canny算子分别对两幅图像进行边缘特征提取,提取到的边缘特征保存为图形I和J,如图13—图14所示。
2)由于边缘特征存在不连续性,本文需要膨胀处理该形体,从而达到连续性的边缘特征,图形I1 和J1分别为采用膨胀处理后的结果,如图15—图16所示。
3)提取边缘差分的相应特征图像。采用上述的图形I1和J1作差运算分析:首先确定基准图像为图像 J1,求取图像 I1与其所属的边缘差分图像——I2;接着确定基准图像为图像I1,求取图像J1与其所属的边缘差分图像——J2;求取了两个不同边缘差分图像后,再将相应的结果进行叠加,就可以得到整个过程所属的边缘差分的图像;最后保存为T1,具体结果如图17所示。
4)求取不同灰度差值的轮廓。首先进行两个不同原始图像的差值运算;然后进行差值结果的相应阈值处理;最后得到最终的检测结果,同时保存结果为相应的图形T2。
5)需要对图像T1和图像T2进行特定的结合运算。通常是确定基准图像为边缘特征图像T1,然后采用轮廓图像T2对该基准图像进行相应的连接补充,具体结果如图18所示。具体的操作流程如下:
a.需要采取像元检索相应的边缘特征差分图像T1所属的图像矩阵。
b.如果像元值大小是1时,需要观察灰度轮廓图像T2中所对应像元的值大小是否也为1,如果是1,则边缘特征差分图像可以采用连续的轮廓进行填充,这也符合轮廓图像基本连续的性质。
c.如果不是1,则图像配置时就可能存在相应的误差,本文中需要采取缓冲处理,具体步骤如下:判断轮廓图像所属像元的像元点数目,观察其值大小是否为1,如果结果是1,则需要进行填充;如果结果不是1,该点的填充过程终止结束。重回到步骤a进行分析。
d.检索进行直到边缘特征差分图像T1所属的最后的像元终止结束。最后的变化检测结果即为输出图像T1。

图13 特征提取后图像I
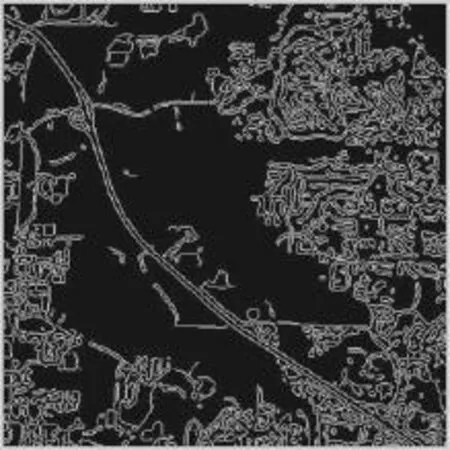
图14 特征提取后图像J
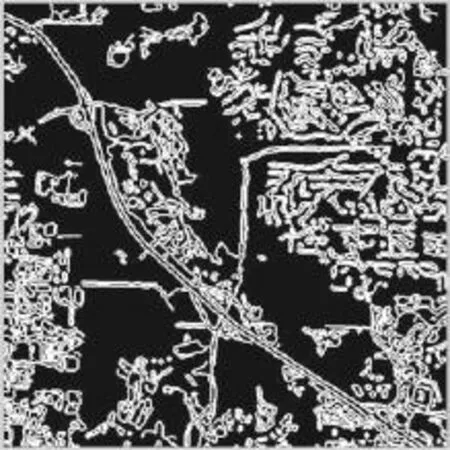
图15 膨胀处理后图像
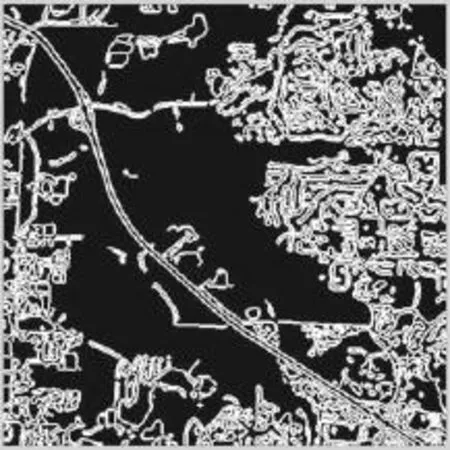
图16 膨胀处理后图像

图17 边缘特征差分图像
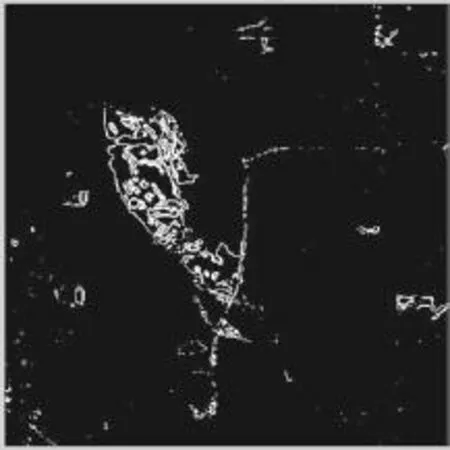
图18 变化检测结果
第3节和第4节的试验成果精度较低,因此只作目视角度的评估,本文算法只是检测出了大体的变化信息,一些细节部分没有突出,且含有大量噪声。但是该部分的算法目的是突出变化信息的特征性质,从而改善常规的直接分类前变化检测算法无法突出地物特征信息这一短板。第3节在检测出变化信息的同时反映了变化地物的纹理特征,而第4节的成果,则很好地突出了变化地物的边缘特征。
四、结束语
本文提出了对几种传统的遥感影像检测的改进算法,并采用Matlab技术对改进算法进行了试验研究。通过对1987—1992年的遥感影像数据处理的结果可以看出,改进后的算法不仅检测出大体变化的特征性质,而且可以改善常规的直接分类前变化检测算法无法突出地物特征信息这一短板。但结果也显示改进后的算法对某些细节部分的检测能力略有不足,有待于进一步完善。
[1] 孙海英,李锋,商慧亮.改进的变分自适应中值滤波算法[J].电子与信息学报,2011,33(7):1743-1747.
[2] 赵磊,王斌,张立明.基于分割窗的无监督多通道遥感图像变化检测[J].信息与电子工程,2010,8(2): 173-179.
[3] 董怡,金伟其,张淼.数学形态学滤波在红外图像去噪中的应用研究[J].激光与红外,2007,37(8):795-798.
[4] 陈雪,马建文,戴芹.基于贝叶斯网络分类的遥感影像变化检测[J].遥感学报,2005,9(6):667-672.
[5] 高新波,李洁,姬红兵.基于加权模糊c均值聚类与统计检验指导的多阈值图像自动分割算法[J].电子学报,2004,32(4):661-664.
[6] 毛士艺,赵巍.多传感器图像融合技术综述[J].北京航空航天大学学报,2002,28(5):512-518.
On the Algorithm Improvement for RS Image Change Detection Based on Matlab
ZHANG Rong
10.13474/j.cnki.11-2246.2016.0230.
P231
B
0494-0911(2016)07-0084-06
2015-12-02;
2016-01-08
张 嵘(1972—),男,工程师,主要从事工程测量工作。E-mail:renxiang0207@126.com
引文格式:张嵘.基于Matlab平台的遥感图像变化检测算法改进策略[J].测绘通报,2016(7):84-89.