4种在线PPP服务系统定位精度分析
2016-08-10王挥云
王挥云
(中铁十九局集团矿业投资有限公司,北京100161)
4种在线PPP服务系统定位精度分析
王挥云
(中铁十九局集团矿业投资有限公司,北京100161)
系统比较了APPS、CSRS-PPP、GAPS、magicGNSS 4种在线PPP服务系统的特性,在此基础上,利用全球分布的5个IGS站,分析了这4种在线PPP服务系统在定位精度、收敛时间、对流层延迟精度3个方面的解算性能。试验结果表明,4种在线PPP服务系统解算的单天站坐标的精度都可达毫米级,其中APPS和CSRS-PPP解算的坐标精度略高于另外两种服务解算的精度。PPP定位坐标在1 h内可收敛至厘米级,在1.5 h时定位精度在0.05 m内。另外,4种在线PPP服务系统解算的对流层天顶延迟ZTD与IGS发布的ZTD也具有较高的一致性。
在线PPP服务;定位精度;收敛时间;对流层天顶延迟
GNSS相对定位技术可获得高精度定位结果,已广泛应用于大地测量中。但是,GNSS相对定位技术也有其局限性:至少需要两台接收机,并且需要参考站的已知坐标值;另外,随着距离的增加,大气延迟等误差的相关性减弱,定位精度也随之降低。传统的单点定位技术虽可以获得单站的位置坐标,但精度不高,不适用于一些精密测量和工程应用。而精密单点定位技术(precise point positioning,PPP)只需一台接收机,利用精密卫星轨道和精密钟差产品,综合考虑各项误差源,就可实现静态毫米级,动态厘米至分米级的定位精度[1]。与相对定位技术相比,PPP技术不需要区域的参考站,降低了作业成本,提高了作业效率。
近些年,一些免费在线GNSS服务系统逐步建立。这些在线服务系统没有任何限制,也不需要用户了解详细的处理过程,用户只需按要求提供观测数据,就可获得相应的定位结果[2]。目前,可提供单点定位的在线服务系统主要有AUSPOS、SCOUT、OPUS、APPS、CSRS-PPP、GAPS、magicGNSS等[3-4]。其中,AUSPOS、SCOUT、OPUS是基于基线网解算,其方式为将上传观测数据与其附近的几个IGS站或CORS参考站进行联合解算和平差;而APPS、CSRS-PPP、GAPS、magicGNSS是以非差精密单点定位方式进行解算。这些在线服务系统的解算精度和可靠性是用户所关心的问题,也是决定其实用性的前提。徐莹等[5]利用美国境内的3个参考站观测数据分析了AUSPOS、SCOUT、OPUS 3种软件解算结果的内外符合精度,并评价了其实用性。陈良等[6]利用中国大陆构造环境监测网数据对APPS、 CSRS-PPP、GAPS、magicGNSS的静态和动态解算性能进行了比较,得出了各系统处理静态数据达厘米级、处理动态数据达分米级的结论。郭斐等[7]详细分析了APPS、CSRS-PPP、GAPS、magicGNSS 4种服务系统对钟跳数据的处理性能。
在线服务系统的解算性能不仅可用站点坐标的精度来衡量,也可用对流层延迟等产品的精度来反映。本文将对基于PPP的4种在线服务系统的解算结果进行比较,分析它们的坐标精度、收敛时间、对流层延迟精度等,旨在系统地综合评价这4种在线服务系统的解算性能。
一、精密单点定位数学模型
GPS精密单点定位一般是采用单台双频接收机,利用IGS提供的精密星历和卫星钟差,基于载波相位观测值进行的高精度定位。其观测方程如下[8]

式中,lp和lφ分别为无电离层伪距组合观测值和无电离层相位组合观测值;ρ为接收机(Xr,Yr,Zr)和卫星(Xi,Yi,Zi)间的几何距离;r表示接收机号;i表示卫星号;c为光速;dtr和dTi分别表示接收机钟差和卫星钟差;Tr表示中性大气(主要为对流层)引起的延迟;λ为载波波长;Ni为无电离层相位组合观测值的模糊度;εp和εφ分别表示无电离层伪距观测值和相位观测值的观测噪声(包括多路径效应等)。
在精密单点定位的数学模型中,需要考虑各种改正数,如地球固体潮改正、海洋负荷潮改正、天线相位中心偏差改正、相位缠绕改正等[9]。观测值中的电离层延迟误差通过双频信号组合消除,对流层延迟误差和接收机钟差则通过引入未知参数进行估计[10]。另外,由导航电文得到的卫星钟和轨道参数的精度较低,不能满足精密单点定位的要求,一般采用IGS发布的精密星历和精密钟差代替。
二、4种在线服务系统的特性比较
不同在线服务系统的设计方式各不相同,表1给出了APPS、CSRS-PPP、GAPS、magicGNSS 4种服务系统的特性。对4种服务系统的特性分析可知,它们接收观测数据的方式略有不同,但都仅支持RINEX格式的观测数据。4种服务系统都可分别处理静态和动态观测数据,但目前APPS仅支持默认静态方式,动态方式处于不可选择状态。对解算报告分析可知,4种服务系统的处理模型都不相同。如CSRS-PPP在处理对流层延迟时采用的是Hopfield模型,投影函数为GMF;而GAPS可提供多种先验模型,并且有Vienna和Niell两种投影函数供选择。
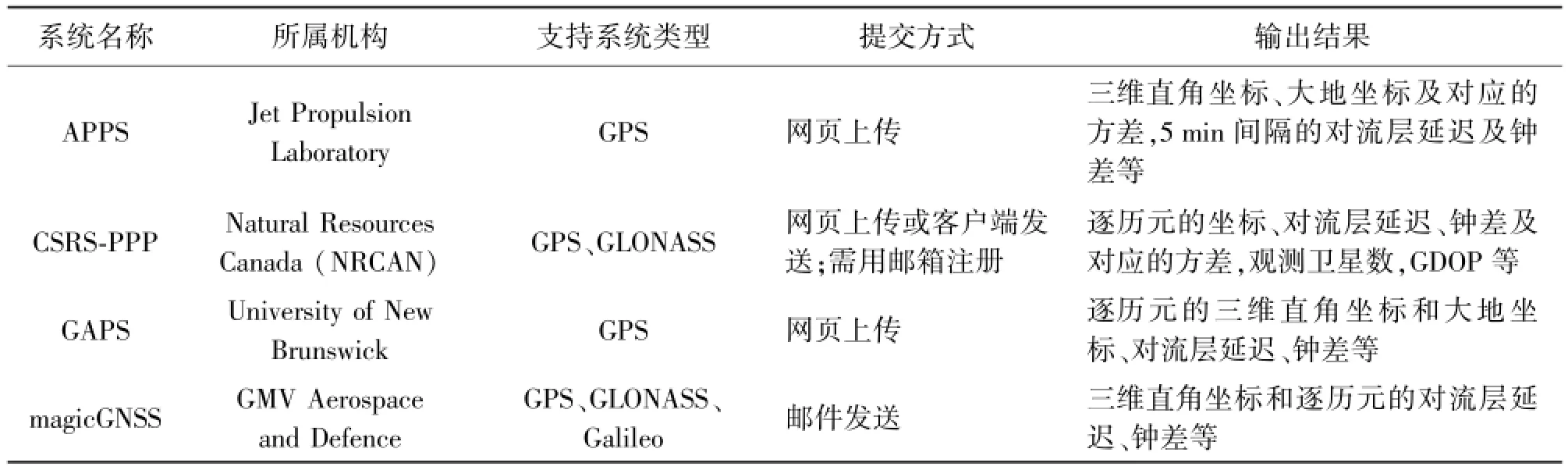
表1 4种在线服务系统的特性比较
三、产品精度分析
1.试验数据
为分析4种在线PPP的定位精度、收敛时间状况、对流层和接收机钟差估计值情况,分别下载5个IGS站2015年4月10日(年积日为100,GPS周为1839)采样间隔为30 s的单天观测数据。这5个IGS站分布在全球不同纬度地区,具有很高的代表性,站点的地理位置见表2。分别利用4种在线服务系统处理上述5个IGS站的观测数据,对解算结果进行统计分析。在对解算结果的分析过程中,都以IGS网站公布的对应产品数据作为真值。
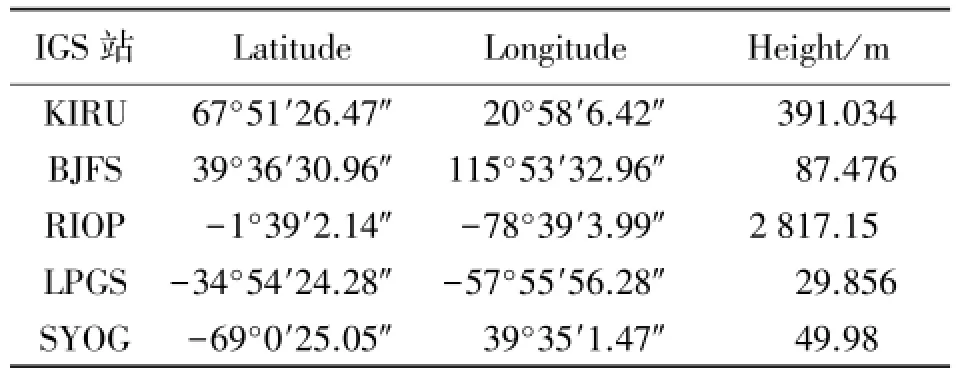
表2 5个IGS站的地理位置
2.定位精度分析
4种在线服务系统解算的结果中,CSRS-PPP和GAPS可提供逐历元的坐标结果,而 APPS和magicGNSS仅提供最终的定位结果。分别提取4种在线服务系统的坐标数据,与IGS提供的坐标作比较。这里仅给出LPGS、RIOP、SYOG 3个站点的比较结果,残差见表3。

表3 4种在线服务软件位置解算精度比较 m
从表3可知,3个站点在3个坐标方向的残差值都较小,最大为0.016 m,最小为0,且大多数的残差值在毫米级。对比4种在线服务系统的解算结果,APPS和CSRS-PPP解算的坐标残差值都在毫米级,比GAPS和magicGNSS的解算精度略高。另外,从4种在线服务系统的解算结果中发现,解算坐标的均方根也都较小,全都在毫米级,说明这4种在线服务系统解算结果的内符合精度也较高。
3.定位收敛性分析
虽然PPP技术具有实施简单和低成本的优点,但是该技术一般需要较长的收敛时间。这是由于可见卫星的数量及几何分布、观测环境、观测数据质量等因素的影响。而最主要的原因是卫星和接收机的相位未校准硬件延迟的小数部分破坏了整周模糊度的整数特性,只能利用实数模糊度进行定位,从而延长了定位收敛时间。为分析PPP定位的收敛时间,利用GAPS逐历元的定位结果,与IGS发布的坐标值作差,获得逐历元的残差值,如图1和图2所示。这里仅给出LPGS和SYOG的逐历元残差图。
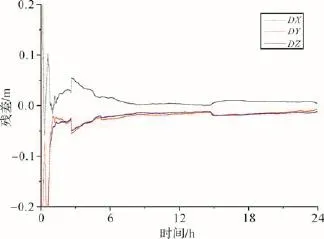
图1 LPGS站的坐标残差分布

图2 SYOG站的坐标残差分布
从图1和图2可知,在初始历元中,两个站点的坐标残差值都较大,这是由于初始历元中载波相位的观测值还较少,主要依赖于伪距观测值进行定位,因此定位精度较差。随着观测数据的增多,载波相位观测值逐渐对定位起主要作用,定位精度随之提高。两个测站的残值图表明,在1 h内坐标残差值都收敛至厘米级,在1.5 h时定位精度可达0.05 m内。对比两个测站的残差图,SYOG比LPGS的收敛性要好,这可能是由于测站SYOG的观测数据质量较好。
4.对流层延迟精度分析
在GNSS定位中,对流层延迟是重要的误差源之一。在卫星导航系统中,如何获取高精度的对流层天顶延迟(zenith tropospheric delay,ZTD)是当前卫星导航定位的重要研究内容之一。在GNSS气象学中,ZTD对于研究水汽变化进而对降水进行预报也具有重要意义。PPP技术是获取ZTD产品的一种新的测量方式,而PPP解算的ZTD产品的精度和可靠性是决定其实用性的前提。
为分析4种在线PPP服务系统解算的ZTD产品的精度,利用这4种在线PPP服务系统解算了BJFS、KIRU、LPGS、RIOP、SYOG 5个测站的单天观测数据,从解算结果中提取了ZTD产品,并与IGS发布的ZTD产品进行比较,如图3—图7所示。从5个测站的ZTD对比图可知,4种在线PPP服务系统解算的ZTD产品与IGS发布的ZTD产品具有较高的一致性。但由于4种在线PPP服务系统选用的先验模型和映射函数不相同,因此解算的ZTD产品也有所差别。GAPS解算的ZTD在初始历元中波动较大,随着观测量的增多,其与IGS发布的ZTD间的偏差逐渐缩小。另外,GAPS解算的ZTD在有些测站与IGS发布的ZTD具有较好的一致性,而在其他测站的一些历元中出现较大偏差,如KIRU站,这说明GAPS解算的稳定性不高。在4种在线PPP服务系统中,APPS解算的ZTD与IGS发布的ZTD具有最好的一致性,5个测站的ZTD偏差都在1 cm内。CSRS-PPP和magicGNSS解算的ZTD具有较好的一致性,且与IGS发布的ZTD相似性也较高。
四、结束语
PPP是一种利用单台接收机就可获得静态厘米级定位精度的测量技术,其最大的优点是不需要用户设置参考站,从而极大地降低了测量成本,简化了测量方式。本文利用全球分布的5个IGS站的观测数据,详细分析了4种在线PPP服务系统在定位精度、定位收敛性、对流层延迟精度3个方面的解算性能,系统全面评价了PPP定位技术。4种在线PPP服务系统解算的单天站坐标的精度都可达毫米级,其中APPS和CSRS-PPP解算的坐标精度略高于另外两种解算的精度。PPP定位坐标在1 h内可收敛至厘米级,在1.5 h时定位精度在0.05 m内。另外,4种在线PPP服务系统解算的ZTD与IGS发布的ZTD也具有较高的一致性,其中APPS解算的ZTD精度最好,GAPS解算的ZTD在有些历元出现一定的波动。
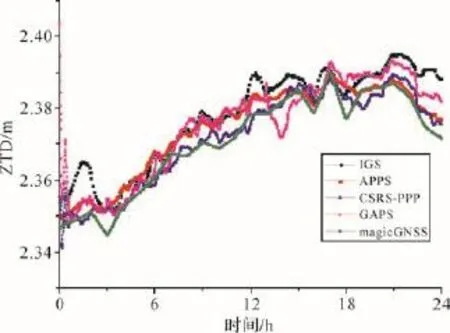
图3 不同软件解算的BJFS站ZTD
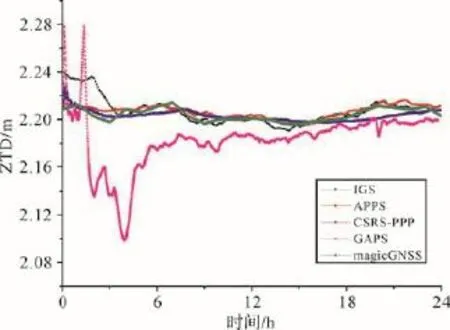
图4 不同软件解算的KIRU站ZTD

图5 不同软件解算的LPGS站ZTD
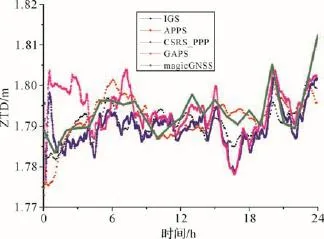
图6 不同软件解算的RIOP站ZTD
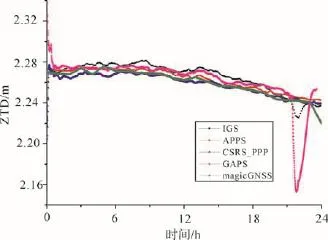
图7 不同软件解算的SYOG站ZTD
[1] 张小红,左翔,李盼,等.BDS/GPS精密单点定位收敛时间与定位精度的比较[J].测绘学报,2015,44(3): 250-256.
[2] MARTíN A,ANQUELA A B,CAPILLA R,et al.PPP Technique Analysis Based on Time Convergence,Repeatability,IGS Products,Different Software Processing,and GPS+GLONASS Constellation[J].Journal of Surveying Engineering,2010,137(3):99-108.
[3] LEANDRO R F,SANTOS M C,LANGLEY R B. GAPS:The GPS Analysis and Positioning Software-A Brief Overview[C]∥Proc.ION GNSS.[S.l.]:[s.n.],2007:1807-1811.
[4] TSAKIRI M.GPS Processing Using Online Services[J]. Journal of Surveying Engineering,2008,134(4):115-125.
[5] 徐莹,聂桂根,吕乔森.GNSS在线数据处理系统的比较与分析[J].测绘通报,2010(12):30-33.
[6] 陈良,赵齐乐,赵颖.四种在线精密单点定位服务系统的比较与精度分析[J].测绘信息与工程,2011 (6):11-12,25.
[7] 郭斐,张小红.在线PPP服务系统对钟跳的处理能力分析[J].武汉大学学报(信息科学版),2012,37(11):1333-1336,1388.
[8] 郑艳丽.GPS非差精密单点定位模糊度固定理论与方法研究[D].武汉:武汉大学,2013.
[9] 胡洪.GNSS精密单点定位算法研究与实现[D].徐州:中国矿业大学,2014.
[10] 李征航,张小红.卫星导航定位新技术及高精度数据处理方法[M].武汉:武汉大学出版社,2009.
变 更
本刊2016年第6期第69页《北斗高精度手持机在航测外业中的应用》一文,第一作者李军的单位应为"陕西省第二测绘工程院",特此变更。
《测绘通报》编辑部
2016年07月15日
Positioning Accuracy Analysis Obtained from Four Online PPP Services
WANG Huiyun
10.13474/j.cnki.11-2246.2016.0225.
P228
B
0494-0911(2016)07-0066-04
2016-03-13
王挥云(1971—),男,高级工程师,主要研究方向为数字化矿山。E-mail:13904186880@163.com
引文格式:王挥云.4种在线PPP服务系统定位精度分析[J].测绘通报,2016(7):66-69.