工程投影面智能化优选软件的设计与实现
2016-08-10潘国兵李灵爱李华蓉梅君涛3
潘国兵,李灵爱,李华蓉,梅君涛3,王 萌
(1.重庆交通大学交通土建工程材料国家地方联合工程实验室,重庆400074;2.公路地质灾变预警空间信息技术湖南省工程实验室,湖南长沙410114;3.四川省广元市青川县竹园镇人民政府党政办,四川广元628100)
工程投影面智能化优选软件的设计与实现
潘国兵1,2,李灵爱1,李华蓉1,梅君涛3,王萌1
(1.重庆交通大学交通土建工程材料国家地方联合工程实验室,重庆400074;2.公路地质
灾变预警空间信息技术湖南省工程实验室,湖南长沙410114;3.四川省广元市青川县竹园镇人民政府党政办,四川广元628100)
工程建设中,投影面和投影带选取的优劣与工程测量控制网及施工放样精度有着密切关系。本文结合Visual Basic编程语言、投影变形约束参数进行软件开发,根据地形、地势条件复杂程度不同,通过坐标微动调整投影高程与中央子午线偏离距离、逐点投影、分段投影等方法来确定最优抵偿投影面,从而对工程投影面投影误差进行改正。工程实践应用表明,软件计算成果满足工程投影精度要求,具备较强的实用价值。
高斯投影;抵偿投影面;程序设计;工程实践
众所周知,工测控制网不仅应作为大比例尺地形图的控制基础,还应作为各种施工放样测设数据的依据。为了便于施工放样,要求由坐标反算得到的边长与实地量测的边长在长度上应相等,即要求由“实量边长归算至参考椭球面上的变形”和“椭球面上的边长归算至高斯投影面上的变形”两项变形之和不得大于放样的精度要求[1](高速公路道路每千米的长度变形不应大于2.5 cm[2])。而有数据表明,当测区平均高程在100 m以下,且横坐标值不大于40 km时,每千米投影变形均不大于2.5 cm,可以满足大比例尺测图和工程放样的精度要求。当测区高程超过160 m以上时,仅“实量边长归算至参考椭球面上的变形”就已经达到每千米2.51 cm的变形值;另外,测区横坐标在150 km以上时,“椭球面上的边长归算至高斯投影面上的变形”也已经达到每千米2.78 cm的变形值,而且这一项变形值是随着横坐标的二次方在增大,即使两项的符号相反,能够抵消部分,但是往往测区的高程差异比较大,横坐标差异比较小,使得两项改正不能够很好地抵消,这就使得工程测量工作不能直接进行,必须首先需要对边长变形进行改正[3]。
通过对工程投影面选择研究现状的调研,可知传统模式主要依赖于建设者的经验来进行投影面的确定,纵然目前投影变形改正理论已日趋成熟,但针对地形条件复杂、工程跨经度范围较大的区域,仍存在计算过程复杂、工作量大、计算效率低、不易满足整个测区投影变形精度要求等问题。因此,有必要通过对工程投影变形理论的研究和公式的梳理,对投影变形改正进行系统的分析,利用Visual Basic编程语言进行软件开发,实现在测区控制点初始坐标数据导入的基础上,通过选择公路等级要求确定投影的精度,由软件智能化选择满足相应精度要求的最优工程投影面,尤其使高精度工程建设及复杂地形区域的投影面选择更为快速和可靠。
一、抵偿投影面算法分析
软件设计的目的旨在将导入数据通过自动化计算和处理,结合测区特点,并根据国家投影变形相关限制规范要求,智能化优选出测区最佳抵偿投影面。数据有效信息的提取是执行以上工作的必要前提,因此,首先针对投影面确定的必要程序算法进行分析,并总结出软件设计中投影分析需要注意的几个关键点:
1)单一投影:正反算相结合。正算时,在求得最佳抵偿投影面高程预值的基础上,根据点位横坐标Y值计算综合变形值,再比对规范精度要求,统计变形合格率;反算时,利用测区点位平均高程求得测区中央子午线偏移量y0,同样求得综合变形值得到统计变形合格率;进而通过坐标微动的方式,使变形合格率往100%的方向靠近,只有当合格率为100%时表明此时的计算结果满足相关等级的工程投影的精度要求[4]。
2)逐点投影:在简单投影不能选择出最佳抵偿面的情况下,通过由程序自动改变抵偿高程和中央子午线移动量,并依序逐点匹配,当合格率为100%时,此时的抵偿高程和中央子午线为满足投影变形的投影面。
3)分段投影:针对地形条件较为复杂或跨经度范围较大的测区,由于整个测区不能得到统一的最佳抵偿投影面,因此,在测区点位信息依序排列的基础上,通过程序将测区横坐标y与对应高程h展绘于二维平面上,根据二维图形将测区进行分段,并分别投影,使得每段所得抵偿高程和中央子午线所构成的抵偿投影面均能满足工程精度要求。
二、软体设计与实现
1.设计思路
软件设计流程如图1所示。
2.模块设计
为便于程序设计,在软件流程梳理的基础上,针对程序内部算法的复杂性,将程序功能及操作进行模块化。为此,笔者共设置包括数据导入模块、数据处理模块及成果检核模块在内的13个模块进行软件构建,软件功能界面如图2所示。鉴于篇幅限制,以下仅对重点模块进行简要介绍。

图1 软件设计流程

图2 软件功能界面
(1)数据导入模块
1)原始数据读取:录入存储于计算机任一根目录下的原始数据文件(TXT或DAT格式文件均可),提取包含横坐标Y、纵坐标X、点位高程H在内的数据信息。
2)有效数据读取:由于坐标转换中所涉及的两次投影变形主要受横坐标Y和点位高程H影响,程序计算要求将原始数据文件中以上两者全部数据信息展现于主界面,以便与变形值形成参照关联,同时也便于进行简单的人工核验。
3)高斯投影坐标数据需注意国家带号与横坐标500 km偏移值的改正,数据预处理时得到真值。
执行数据读取并写入相关变量是较为重要的过程,读取顺序与测量顺序需保持一致,在此基础上,对原始数据附加信息应予以删除。主要代码参如下[5]:
′导入数据
Open CommonDialog1.FileName For Input As#1
ReDim sz(gs1)
i1=0
Do Until EOF(1)
Input#1,z
sz(i1)=z
i1=i1+1
Loop
Close
ds=0
For i=0 To i1-1
If i Mod 5=3 Then
List2.AddItem sz(i)
End If
If i Mod 5=4 Then
List3.AddItem sz(i)
End If
Next
(2)数据处理模块
1)内业计算子模块:内业计算的首要过程是通过单一投影来实现综合变形最小,关键在于求得较为理想的高差值ΔH。根据测区地理条件不同及测区范围大小差异,求取测区点位平均高程值、测区偏离国家中央子午线距离值、点位变形值及综合变形值等,最终求得最佳抵偿面[6]。主要代码如下:
′进行常规计算
dH=H0
For i=0 To List3.ListCount-1
h=Hm-dH
dHi=Val(List3.List(i))-h
w=Format(-100000*dHi/R,"0.000")
List10.List(i)=Format(-100000*dHi/R,"0.000")
′上面是计算w
v=Format(0.5*100000*Val(List2.List(i))*Val (List2.List(i))/(R*R),"0.000")
List5.List(i)=Format(0.5*100000*Val(List2.List (i))*Val(List2.List(i))/(R*R),"0.000")
List6.List(i)=Format(w+v,"0.000")
Next
Text9.Text=Hm-dH
Text7.Text=Text9.Text
Text8.Text=0
Text10.Text=0
2)检核子模块:根据控制网等级要求,对内业计算所得综合投影变形值进行逐点精度检核,并对未能满足精度要求的点位予以提示。进而根据点位达标比例,评估所选投影面的优劣,并将点位合格率在主界面通过色彩区分的方式呈现。若抵偿面未能满足要求,则由内业计算选用更为恰当投影方式并再作相关运算,使选择结果能够最佳。主要代码如下:
′检测超限
If Val(Text6.Text)=0 Then
MsgBox"请先选择等级",vbOKOnly,"提示"
Exit Sub
End If
bhg=0
For i=0 To List6.ListCount-1
If Abs(Val(List6.List(i)))〉Val(Text6.Text)Then
p=p&Space(3)&(i+1)
t=t&Space(3)&List6.List(i)
bhg=bhg+1 ′计算出不合格的点数
End If
Next
hg=ds-bhg ′计算出合格的点数
bfb=Format(hg/ds,"0.000")*100
Text12.Text=bfb
If p=""Then
MsgBox"没有超限",vbOKOnly,"检查结果"
Else
MsgBox"超出精度范围的是"&"第"&p&"个点"& Chr(13)&"两次投影综合变形为"&t,vbOKOnly,"检查结果"
3)模型修正子模块:通过抵偿投影高程面微调和中央子午线微调的方式,在单一方法计算的基础上进行微量改变,逐步调整和检查综合投影变形值,使其达到最小或符合相关规范标准要求[7]。主要代码如下:
′微动纵坐标h
hh=VScroll1.Value
For i=0 To ds-1
dHi=Val(List3.List(i))-h
w=Format(-100000*dHi/R,"0.000")
List10.List(i)=Format(-100000*dHi/R,"0.000")
′上面是计算w的值,下面是计算v的值
Dim dYi As Double′每一点的偏移量
dYi=Val(List2.List(i))+dy
v=Format(0.5*100000*dYi*dYi/(R*R),"0.000")
List5.List(i)=Format(0.5*100000*dYi*dYi/(R* R),"0.000")
List6.List(i)=Format(w+v,"0.000")
Next′微动横坐标y
y=HScroll1.Value
For i=0 To ds-1
dYi=Val(List2.List(i))+dy
v=Format(0.5*100000*dYi*dYi/(R*R),"0.000")
List5.List(i)=Format(0.5*100000*dYi*dYi/(R* R),"0.000")
′上面是计算v的值,下面是计算w的值
dXi=Val(List3.List(i))-h
w=Format(-dXi*100000/R,"0.000")
List10.List(i)=Format(-dXi*100000/R,"0.000")
List6.List(i)=Format(w+v,"0.000")
三、系统工程实践应用
本文以实际工程项目为测试对象,分别选取地势条件各异的两个测区数据进行软件功能测试,较为直观地对软件实践应用的有效性和可靠性予以验证。
1.地势平缓区域投影面优选
从TXT数据文件(如图3所示)中将原始数据加载至软件数据处理模块中。由于该测区地形起伏程度及测区范围均较小,故对原始数据分别采用改变抵偿面及移动中央子午线的简单投影即能求得最佳抵偿投影面[8],软件界面显示为点位数据综合变形值精度合格率为100%。如图4、图5所示。

图3 测区I原始数据文件
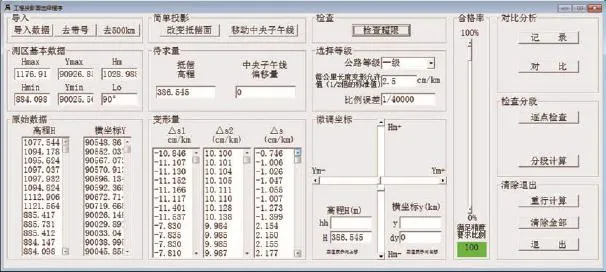
图4 测区I改变抵偿面投影结果
2.复杂地形投影面优选
针对实际工程项目,其中不乏地形条件复杂、东西跨度较大的测区最佳抵偿投影面的选择[9]。此类情况下,单一投影方式难以满足测区综合投影变形限制要求,进而需要采用其他投影方式[10]。如图6所示,以高程差异较大的公路工程项目为例进行说明。
分别采用上述两种单一投影,求得测区II点位综合变形合格率为45%和32%,未能达到公路控制等级要求,在此基础上,采用坐标微动和逐点投影的方式,使得合格率有所提升,达到60%和58%(如图7、图8所示),仍未能确定出符合投影精度要求的最佳抵偿投影面[11]。鉴于此,程序选用分段投影方式,将测区点位原始数据按照横坐标Y依序进行排列[12],展绘高程二维图(如图9所示),据此二维图进行分段投影,求得综合变形合格率100%的最佳抵偿面,如图10所示。
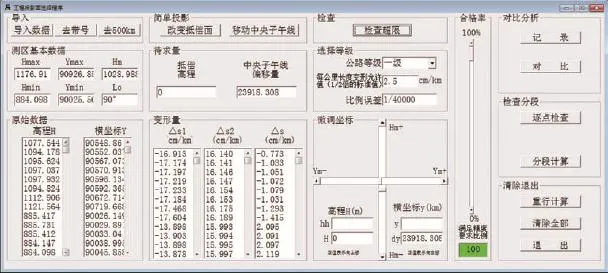
图5 测区I移动中央子午线投影结果

图6 测区II原始数据文件
图7 坐标微动合格率
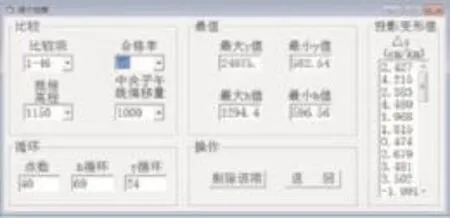
图8 逐点投影合格率

图9 测区II高程二维图
四、结束语
工程建设中,投影面和投影带选取的优劣与工程测量控制网及施工放样精度有着密切关系,笔者结合Visual Basic编程语言、投影变形约束参数进行软件开发,根据地形、地势条件复杂程度的不同,通过坐标微动调整投影,其选择结果是工程建设顺利与否的先决条件。笔者自行开发的工程投影面智能化优选软件便于操作,其具备处理效率高、可靠性强等优势。针对不同地形条件及测区范围,操作者结合工程项目要求,即能优选出最佳抵偿投影面,验证了其有效性。尤其针对地形条件复杂的大型测区,采用高程二维图展绘与分段投影相结合的方法,所求得的抵偿面准确可靠。在后续软件开发中,将推动软件功能朝向一键式操作发展。

图10 分段投影最佳抵偿面
[1] 范一中,王继刚,赵丽华.抵偿投影面的最佳选取问题[J].测绘通报,2000(2):20-21.
[2] 孔祥元,郭际明.控制测量学[M].武汉:武汉大学出版社,2010.
[3] 袁钢,方向明.山区路线勘测中不同投影面间的坐标简易换算方法[J].测绘通报,2012(4):58-60.
[4] 国家三、四等水准测量规范:GB/T 12898—2009[S].北京:中国标准出版社,2009.
[5] 龚沛曾.Visual Basic程序设计简明教程[M].北京:高等教育出版社.2002.
[6] 吴啸龙,杨志强,白亚伟.一种粒子群算法求解最优抵偿投影面的方法[J].测绘科学,2015,40(2):142-145.
[7] 李祖锋,高建军,缪志选,等.利用最优抵偿投影面算法限制GPS边长投影变形[J].测绘工程,2010,19 (1):75-77.
[8] 银志敏,王军,马全明,等.城市轨道交通工程平面控制测量坐标系统投影面转换方法的应用研究[J].测绘通报,2015(5):109-112.
[9] 陶伟,孙丽娜.大面积测量作业投影面与投影带的选择[J].城市建设理论研究(电子版),2015(8).
[10] 陈顺宝,任建春,亓月,等.抵偿任意带高斯投影平面坐标系选择的研究[J].测绘通报,2005(7):21-23.
[11] 白建军,宋伟东,马维若.高速公路平面控制测量中投影问题的分析[J].测绘科学,2006,31(4):133-134.
[12] 王继刚,王坚,于先文.具有抵偿面的任意带高斯投影直角坐标系的选取方法[J].测绘通报,2002(11):31-32.
《时空大数据的技术与方法》内容简介
本书作者边馥苓为武汉大学国际软件学院教授,博士生导师,国际软件学院空间信息与数字工程研究中心主任。
本书在对时空信息和大数据相关概念认识的基础上,描述了大数据应用于时空信息处理方面所需的软硬件平台,分析了时空大数据库与传统时空数据库和大数据存储的区别,探讨了时空大数据分析对测绘学科的贡献,提出了时空大数据快速计算的方法,并探索了时空大数据及其处理技术存在问题的解决方法和未来的发展方向。本书沿着时空大数据处理技术的主线,从时空信息与大数据两个方面进行结构组织,内容紧跟学术研究前沿,具有一定的前瞻性。
本书不仅可以作为空间信息与数字工程、计算机、测绘和物联网等领域科技工作者的参考书,还可以作为研究生课程的专业教材。
本书定价43.00元,16开本,158页,2016年5月由测绘出版社出版。
Design and Implementation of Intelligent Optimization Software for Engineering Projection Plane
PAN Guobing,LI Lingai,LI Huarong,MEI Juntao,WANG Meng
10.13474/j.cnki.11-2246. 2016.0223.
P208
B
0494-0911(2016)07-0055-06
2016-01-29
公路地质灾变预警空间信息技术湖南省工程实验室开放基金(长沙理工大学)(kfj50604);重庆交通大学交通土建工程材料国家地方联合工程实验室开放基金(LHSYS-2016-011);重庆市研究生科研创新项目(CYS14157);重庆交通大学研究生教育创新基金项目
潘国兵(1976—),男,博士,副教授,主要从事工程测量等科研方面的工作。E-mail:498805741@qq.com
引文格式:潘国兵,李灵爱,李华蓉,等.工程投影面智能化优选软件的设计与实现[J].测绘通报,2016(7):55-60.