基于局部互相关的遥感图像变化检测技术*
2016-08-10刘攀龙
刘攀龙
(91404部队 秦皇岛 066000)
基于局部互相关的遥感图像变化检测技术*
刘攀龙
(91404部队秦皇岛066000)
摘要针对遥感图像变化检测的全局假设与实际不一致问题,论文提出了基于局部邻域的互相关的遥感图像变化检测算法。该算法首先运用区域划分的思想,以像素灰度级为单位,对图像进行分组处理;其次以多时相遥感图像的差值图像为观察场,以像素所属类别为标号场,建立二者互相关的马尔科夫随机场算法;最后采用两段式步骤,对算法进行迭代处理。实验结果表明在遥感图像变化检测算法中,该方法具有较高的检测精度。
关键词多时相遥感图像; 互相关马尔科夫随机场; 局部邻域
Class NumberTP391
1引言
图像变化检测的目的是为了实现目标识别,而变化检测的核心和关键是提取图像的变化信息。随着各种卫星遥感平台和航空遥感平台的不断运用,基于遥感影像的图像变化检测技术研究成为图像处理的重要研究方向之一[1~2]。近几年,针对遥感图像如何减少人工参与、提高无监督变化检测的准确性的需求,引起了国内外各大高校和学者门的热切关注,涌现了各种各样算法[3]。根据遥感影像变化检测原理,其工作流程主要包括数据获取、预处理、变化检测和精度评估等步骤,如图1所示。
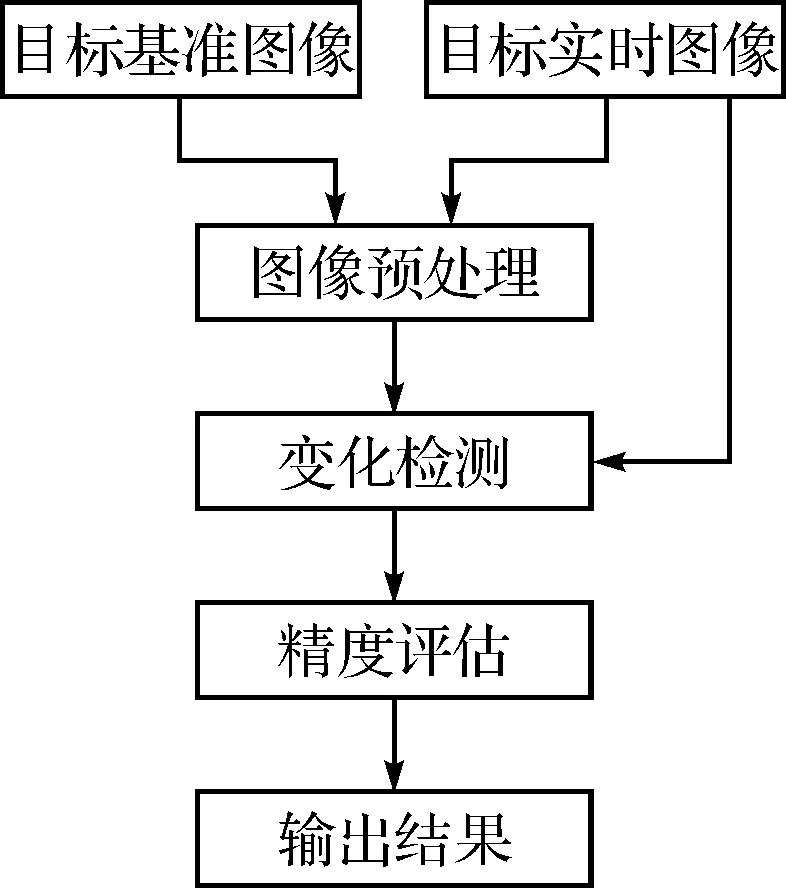
图1 变化检测处理流程
通过分析基于代数运算、基于变换、基于分类和基于空间结构四类变化检测,研究发现基于影像代数运算的变化检测算法的优点在于简单、直接,但难以确定变化的类别,不能对变化信息进行更加具体的描述;基于影像变换的变化检测算法可能造成遥感影像数据丢失;基于影像分类的方法可提供变化目标的类别,减弱了外界因素对图像变化检测的干扰,但其训练样本的精度直接影响分类结果的性能;基于影像空间结构特征的分析方法主要是针对人造目标的变化检测的,其对于高分辨率影像变化检测具有优势,但该类方法对于如何筛选最有价值的图像特征是亟需解决的难点。
本文从目标变化检测的一般流程和常规方法入手,以多时相遥感图像为处理对象,为提高目标检测的效率和检测精度,在分析常规算法-基于影像代数运算中的图像差值法中的马尔科夫随机场算法(MRF)的基础上,对算法进行了改进,提出了基于局部互相关的对海上舰船等目标的变化检测算法。
2基于局部互相关马尔科夫随机场的变化检测
近年来,马尔科夫随机场在遥感图像的监督分类和变化检测中得到了广泛关注[4~6],最大期望值(E-M)的检测算法[7]、贝叶斯(Bayes)理论检测算法和最大后验概率(MAP)准则检测算法[8]等收到了良好的检测效果。
马尔科夫随机场是在图像像素级别的基础上,基于多时相图像的差值图像实现变化检测的,该方法假设所处理的图像中变化检测的区域足够大,但这一假设往往不符合客观实际。因此,本文拟利用观察场和编号场相关的MRF变化算法,也称互相关马尔科夫随机场算法(CMRF)[9],提出基于局部邻域的互相关马尔科夫随机场算法。
2.1MRF基本理论
假设两个不同时相的遥感图像的大小为I×J,像素灰度级为Q,其差值图像为S={s=(i,j);1≤i≤I,1≤j≤J},则其可能存在一个灰度分布,记做X={Xs,s∈S},以及一个对应的标记像素类别的标号分布,记做l={ls;ls∈w,w∈{wn,wc},s∈S},其中标号集wc和wn分别表示两时相下发生变化和没有发生变化的类别标号。另令x表示实际得到的差值图像,l表示对应的实际标号图像,它们分别对应观察场X和标号场L的一个实现。
根据概率最大化原则,有:
(1)
式中,P(L=l)是标号图对应的先验模型,P(X=x|L=l)是x像素灰度的联合密度函数。
2.2基于局部邻域的CMRF方法
对于以像素xs为中心的局部邻域内的像素而言,其所在的区域可能属于变化区域也可能是未变化区域,又根据MRF的性质,像素xs的特征只能由其邻域内标号都为Ls的像素决定,故对像素xs的处理必须同时考虑其特征和标号,因此有如下表达式:
(2)

在上述模型中假设图像服从Gibbs分布,则在以xs为中心,大小为Size×Size的局部邻域中,将其领域内的像素分为两类:wc和wn,并将与xs属于类别l*的所以像素的灰度级组成一个集合Ws,则在Ws内,所有像素组成的子图像就可假设符合MRF。
为降低算法时间复杂度,本文采用区域划分的思想[10],针对局部领域的大小进行最优求解。
现给定一个d维的数据区间R,将其第i维划分成ni个小段,这些小段组成的区间记为Ri,那么该数据区间被笛卡尔集(R1,R2,…,Rq)划分成n1×n2×…×nq个小单元。则每小段在各维上的对应位置所构成的d维向量就用来唯一标识某个单元。例如,区间M可划分为(m1,m2,…,mq),如图2所示。
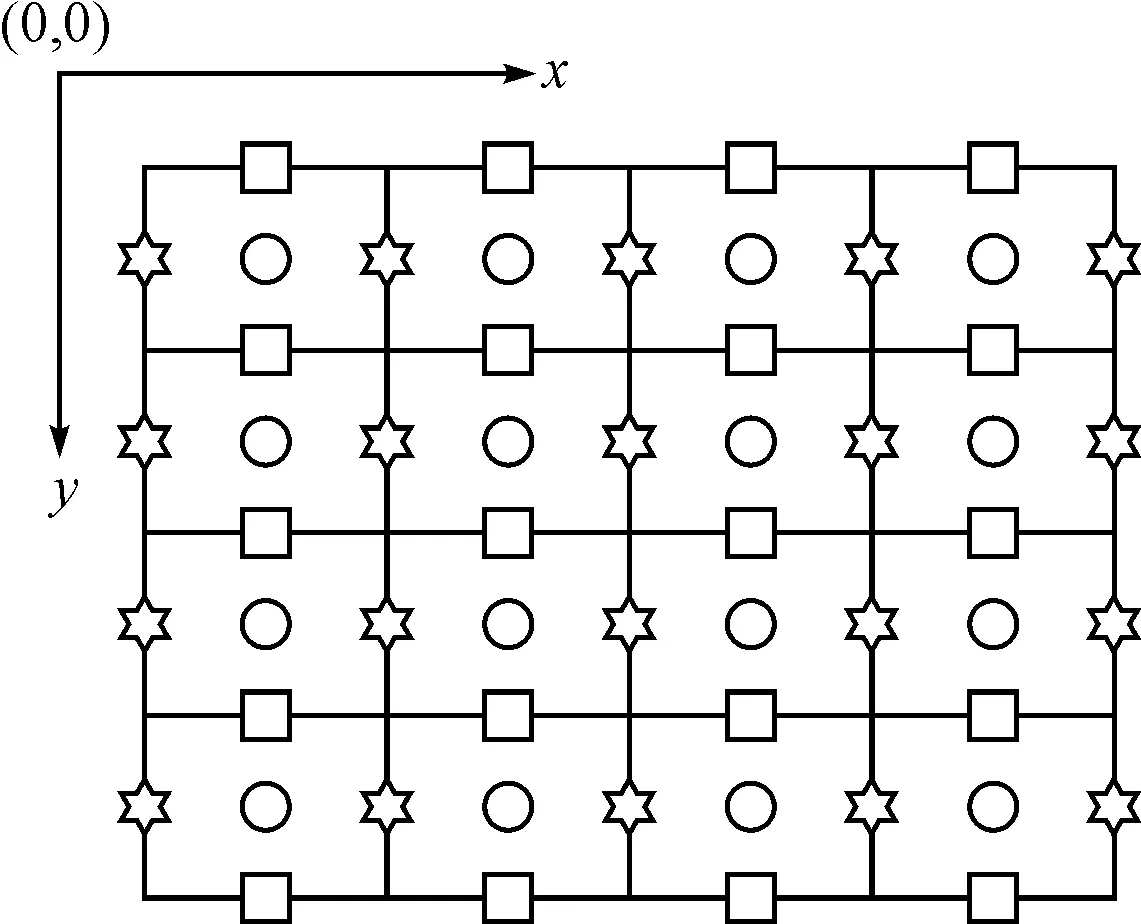
图2 区域划分示意图
在区域划分的基础上,采用先整体后局部的计算方法,首先将图像的差值图像划分成若干个矩形区域,并对这若干个矩形区域的像素进行求解,然后将每个矩形区域看成一个像素点,对整体图像进行二次求解。
现假设图像的二维差值图像Ω被划分成M组M×N个矩形区域,其中每组含有N(N=L/M)个像素灰度级,每个区域有N×N个像素点。另假设需要遍历的像素点之和为Sum,则有:

=M2+N2
(3)
此外,符号场也假设为一个MRF,于是所有像素类别标号的联合概率分布可用Gibbs分布表示:
(4)
其中,为Gibbs能量函数,是归一化常数,T是系统温度。再由Bayes理论,式(2)转化为
(5)
为计算方便,本研究假设标号场的先验概率服从Gibbs分布,能量函数为二阶基团势能之和,基于该假设,式(5)可表示为
(6)

3算法实现
所提出的基于局部邻域CMRF模型算法实现分为两大步骤:
·步骤一:
1)以不同时相的遥感图像的差值图像作为观察场,计算N×N的局部邻域内所有像素的初始特征值;
2)设最初标号场属于wc和wn,并将像素分为两组:初始化标号确定的像素组和标号待优化的像素组;
3)分别计算像素当前标号ls和置换标号ls′所对应的能量Uls和Uls′,并比较二者;
4)根据3)的比较结果,若Uls>Uls′,则以标号ls′代替ls,否则,新标号的确定按照如下公式计算:
(7)
其中,T(n)为n次循环时的温度。
·步骤二:
1)按当前标号场重新估计观察场像素特征;
2)计算比较能量Uls和Uls′;
3)根据2)的比较结果,将较小能量者所对应的标号作为新的标号;
4)重复以上步骤,直至收敛。
4实验及分析
为了验证算法的性能,本文从Google Earth(即采用3D定位技术来查看全球的航空亦或遥感卫星的高分辨率影像)随机选取了20幅较有代表性的图像,实验参数参考文献[9]中的数值,选取α=0.3。原始图像及各个算法的检测结果如图3~图6所示。
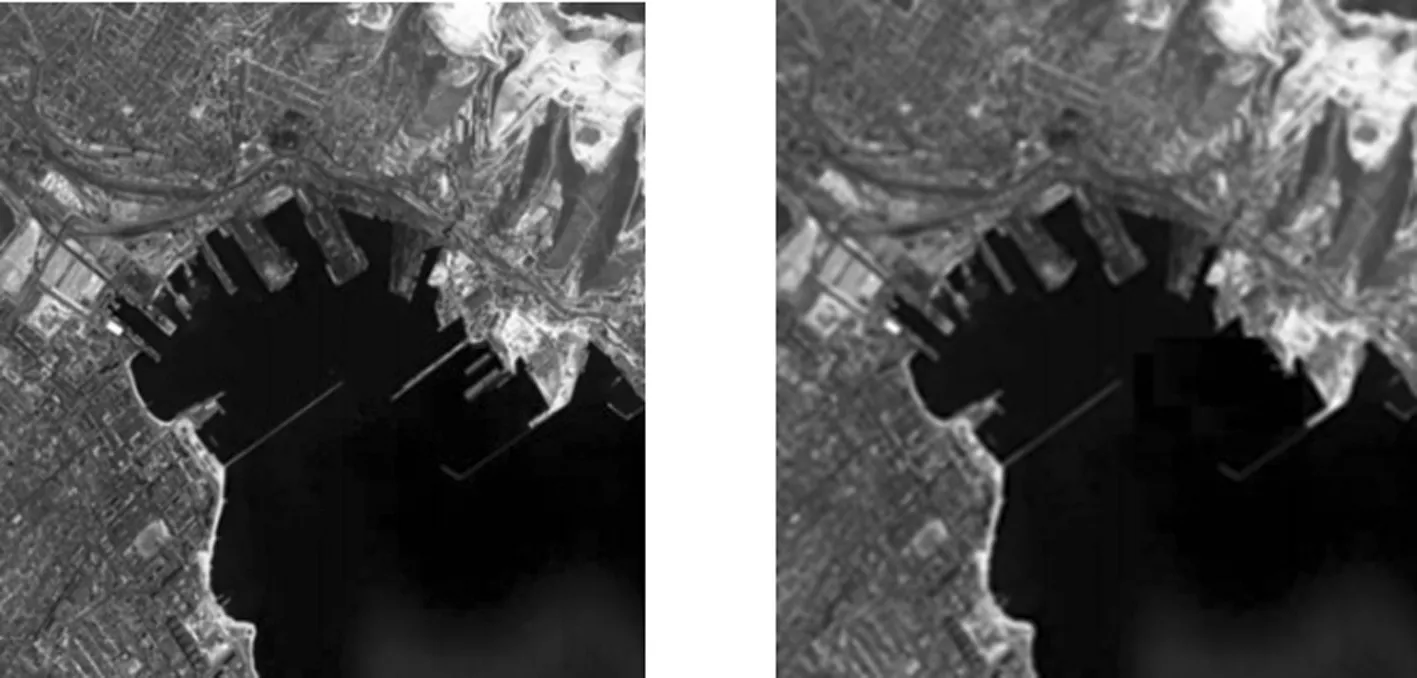
图3 两个时相的港口图像(一)

图4 检测结果(一)
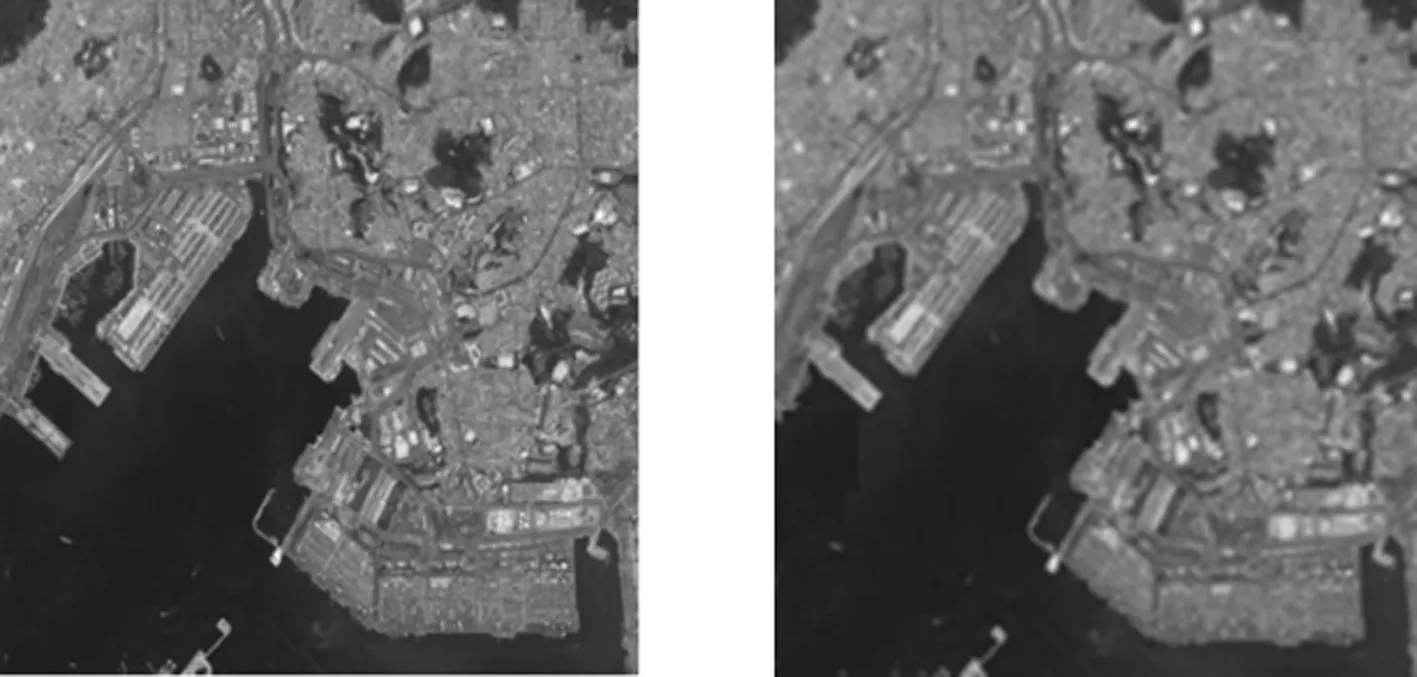
图5 两个时相的港口图像(二)

图6 检测结果(二)
进一步,为对比算法的性能,首先将原始图像采用人工标识的方法获取其真实陆地部分,然后采用Matlab 7.6.0(R2008a)工具进行仿真,计算各个算法的海洋观测部分的错误率和正确率,具体实验数据如表1所示。

表1 实验数据对比表
对比分析MRF检测算法、SMRF检测算法和CMRF检测算法,结果表明CMRF模型的检测精度较高。
5结语
本文在MRF算法的基础上,提出了一种基于局部邻域的互相关MRF算法。基于区域划分的局部处理原则,一定程度上降低了算法的复杂度;同时基于观察场和标号场的互相关MRF算法,提高了图像变化的检测精度。仿真实验表明该算法能够准确获得变化检测结果,为以后的工程应用提供了技术支持。
参 考 文 献
[1] 钟家强.基于多时相遥感图像的变化检测[D].长沙:国防科学技术大学,2005.
[2] Fung,W.Siu. Environmental quality and its change, An analysis using NDVI [J].INT.J.Remote Sensing,2000,21(5):339-55.
[3] Melgani F, Moser G. Unsupervised change-detection methods for remote-sensing images [J]. Opt.Eng,2002,41(12):3288-327.
[4] 申邵洪,谭德宝,梁东业.基于马尔科夫随机场的多时相SAR影像变化检测研究[J].长江科学院院报,2010,27(1):32-34.
[5] Li S Z,Rao C R,Shanbhag D N. Modeling image analysis problems using Markov random field[J]. Stochastic Processes: Modeling and Stimulation,2000,20(5):1-43.
[6] 李杰.隐马尔科夫模型的研究及其在图像识别中的应用[D].北京:清华大学,2004.
[7] Bazi Y, Bruzzone L, Melgani F. An unsupervised approach based on the generalized Gaussian model to automatic change detection in multitemporal SAR images [J].IEEE Transactions on Geoscience and Remote Sensing,2005,43(4):874-887.
[8] Kasetkasem T, Varshney P K. An image change detection algorithm based on Markov random field models [J]. IEEE Transactions on Geoscience and Remote Sensing,2002,40(8):1815-1823.
[9] 袁琪,赵荣椿.一种改进的遥感图像变化检测算法[J].电子与信息学报,2008,30(11):2738-2740.
[10] WeiyaGuo, Xuezhi Xia, XiaofeiWang. Two-dimensional Otsu's thresholding segmentation method based on grid box filter [J]. Optik,2014,125(18):5236-5238.
收稿日期:2016年1月10日,修回日期:2016年2月26日
作者简介:刘攀龙,男,高级工程师,研究方向:信息系统试验。
DOI:中图 号TP39110.3969/j.issn.1672-9730.2016.07.036
A Local Neighborhood Correlation Method to Change Detection Using Multitemporal Remote Sensing Images
LIU Panlong
(No.91404 Troops of PLA, Qinhuangdao066000)
AbstractTo solve the homogeneity between simple Markov Random Field (MRF) assumptions with its actual situation, in this paper a method to change detection based on local neighborhood correlation MRF is proposed.For this method, firstly, the regional division strategy is applied to process images based on pixel’s gray. Secondly, the difference image is taken as observation field, and the obtainedclasses is taken as labeling field, in which the Correlation Markov Field (CMRF) is built. At last, the two-stage iteration algorithm is used to solve the CMRF method. The experimental shows that this method has high detection accuracy.
Key Wordsmultitemporal remote sensing images, correlation markov field, local neighborhood