基于实况气象的动态航线规划方法设计
2016-08-09陈国安
陈国安
基于实况气象的动态航线规划方法设计
陈国安
(海军92730部队 572016)
海洋运输是国际间商品交换中最重要的运输方式之一。海洋上突如其来的恶劣天气时刻威胁着运输船舶的安全,因此,对这些运输船舶进行气象导航是非常有必要的。受局部天气和海况变化影响的航线网络具有动态通达特征,远洋船舶需据此进行计划航线的修正。本文通过建立动态通达网络模型,以船讯网提供的气象信息作为数据来源,通过改进算法,设计了一种最优航线规划方法。
航线规划;气象导航;通达网络;最优决策
由于船舶在海上航行是一种处于海水与大气两种介质中,它是一种受着多种因素影响的复杂运动。为了保证航行安全、争取最大可能的经济效益,或某些特定的要求如节能、定时、平稳、舒适等,需要选择合适的航行线路。
本文研究所针对的是基于实时气象信息的航线规划方法,能够在全局规划的基础上不断优化更新航路,在面对多变的航洋环境中显然具有更加有效和深远的意义,同时,对于提高船舶的安全性以及经济性也有很大的改观。
1 动态通达网络模型
1.1 动态通达网络定义
动态通达网络G(V,E)的要素定义如下:
(1)节点集合V。V中的网络节点Vi是港口集H[港口编号]、航线集L自身的交点集K[航线编号1,航线编号2]、航线集L与有障碍区域O的交点集B[有障碍区域编号]等三类点集的并集,其属性项定义为Vi[节点编号,类型编码,港口编号,航线编号1,航线编号2,有障碍区域编号,影响有障碍区域序列]。其中,根据节点来源,类型编码分别用“H”、“K”、“B”区分,影响有障碍区域序列则以“,”为分隔符存储多个包含节点的有障碍区域编号,其他属性项内容则分别与3类点集的对应属性项内容一致。
(2)网络弧段集E。E中的网络弧段ei是航线集L[航线编号]中航线被节点集合K、B分割后生成的航线段,其属性项定义为ei[弧段编号,节点编号1,节点编号2,航线编号,弧段长度,禁航时段序列]。其中,节点编号1和节点编号2分别存储弧段端点对应的节点编号;航线编号则与弧段所在航线的对应属性一致;禁航时段序列采用分隔符“;”将多个有障碍区域的分段影响时间信息连接成一维序列化字符串存储,而单个禁航时段的具体格式为“(序号,有障碍区域编号,禁航开始时间,禁航结束时间)”。
1.2 有障碍区域多边形提取
(1)静障碍区域。根据出现时间的持续性,静比有障碍区域分为临时性和永久性两类。提取这些区域边界的特征点地理坐标,生成静有障碍区域多边形集合Os={osi,1≤i≤m}。m为静有障碍区域个数,osi的生存周期为[tsk,tek]。
(2)动障碍区域。台风等极端天气在空间上沿可预测方向以一定的作用半径移动,进而形成移动有障碍区域OD={okD,1≤k≤n}(n为有障碍区域中心个数)。移动有障碍区域的描述参数包括初始时刻中心坐标影响半径 rk、移向 Ck、移速 vk,其在时段[tks,tke]的空间影响范围可以通过移动轨迹缓冲带计算得到的多边形来表示。
1.3 动态通达网络模型建立
动态通达网络的实时构建是快速、有效整合航线规划所需信息的基础算法,是将有障碍区域与静态航线网络叠加,确定航行时间段的过程,具体如图1所示。

图1 动态通达网络的建立流程图
2 最优航线规划算法
2.1 续航判断算法
航线通达性判断是确定船舶经过航线上任一弧段时,航行是否受到有障碍区域影响的过程,这是决定后续航线是否需要调整的重要依据。具体方法如下:
(1)设拟航行航线的航线段序列为 Ek{e1,e2,…,ek},初始化。通达性指示变量flagi=0;
(2)设当前船位为P0,航速为V,决策转向时间为t0,计算当前船位P0沿航线到航线段ei起点的累计距离Di,则船舶到达时间为t1=t0+Di/V;
(3)设航线弧段ei的长度为di,则船舶离开航线段终点的时间t2=t1=di/V,确定航线段 ei的拟通行时段 Ti[t1,t2];
(4)提取航线段ei的[禁航时段序列],分段解析获取禁航时间段序列F{F1,F2,…,Ft},循环判断 Ti与 Fi,的时间区间是否相交,如果相交,则令flagi=1;
(5)对航线所有航线段进行步骤(2)~(4)的计算判断,并对所有flagi值(1≤i)求并,若结果为 1,航线不通达,反之,通达。
2.2 改航判断算法
改航算法是要避开有障碍区域O的情况下,获取船舶位置P0附近的其他多条航线并确定由在这些航线上距离P0最近的点所构成的所有转向点的集合S。其设计算法如下:
(1)以当前位置P0为中心,选取一个较小的半径做缓冲区,获取邻近航线段集合 Lk{li,l2,…,lk};
(2)在邻近航线段li上取P0的最近点P1,以连线P0P1作为可航渡的测试线;
(3)如果连线P0P1与O中有障碍区域均不相交,则船舶可以直接通过P0P1绕行到航线段li上;否则,在距P0最近的有障碍区域Om的边界上寻找一个点Pt,使P0P1与P0Pt之间的方位差最大,由Pt替代P0,递归进行步骤(3),直到P0P1之间不存在有障碍区域;
(4)记录所有邻近航线上距离P0最近的点Pli到S中,为最短绕行航线搜索算法提供基础数据。
3 实验与分析
3.1 场景模拟
(1)静态航线网络。本文以东南亚海域为例,根据大洋航路图、航路设计图等资料选取香港(h1)、马尼拉(h)2、胡志明(h)3、哥打基纳巴卢(h4)、文莱(h5)、诗巫(h6)、古晋(h7)、新加坡(h8)8 个主要港口和连接港口的15条己知经验航线。
(2)有障碍区域域数据。以2013年菲律宾西部海域苏禄海海而生成的台风“清松”为例,参数为:1月3日20时,台风中心位置(9.1°N,119.5°E);预计 1 月 7日 20时,台风中心位置(6.2°N,108.1°E),根据航迹计算公式推算得到台风未来96h的移动方向C为75°SW、平均移速v为18.8km/h,7 级风圈半径约为 120km[见图 2(b)]。
(3)动态通达网络。按§1所述方法将台风运动轨迹带与静态航线网络叠加,得到包含20个网络节点(H类8个、K类4个、B类8个),31条网络弧段(4条受有障碍区域影响)的动态通达网络[见图2(b)]。
(4)舰船计划航线。某船从新加坡至香港,航速35km/h,单位油耗2.4917t/h,续航能力 A 为 2500km[见图 2(a)]。
(5)决策时点与需求。以船舶接收到台风预报信息的时间1月3日08:00为决策时点,对应的决船舶位置为P0[见图2(b)],现需要基于前述数据信息对船舶未来航线进行规划。
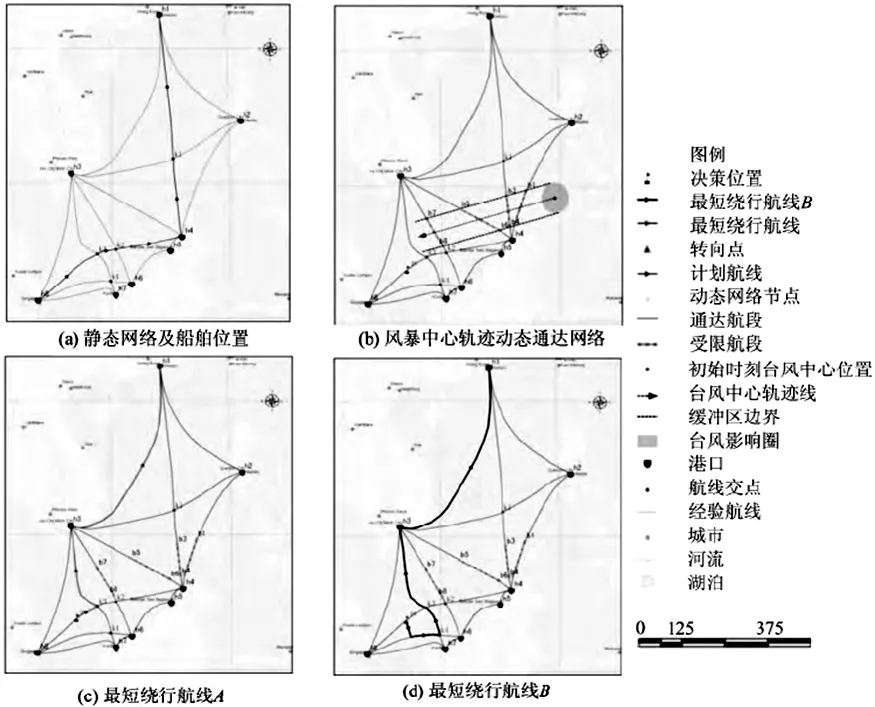
图2 船舶航线规划的场景数据及规划结果
3.2 规划结果
(1)续航性判断。据§2.2.1算法知该计划航线受台风影响不可通行。
(2)改航算法搜索。按照§2.2.2 算法,结果见图 2(c)和图 2(d)。将两条最短航线加入最短绕行航线集,比较长度得到最佳绕行航线。
4 结论
本文方法能够实现航线安全性、可达性和经济性的最佳结合,实验算法也验证了规划技术路线的可操作性。后续研究中,将综合考虑有障碍区域动态变化、大风浪中船舶失速、船舶停靠等候避让决策等多种要素的综合影响,使航线规划方法更加科学、合理。
Design of Dynamic Route Planning Method Based on Live Weather
Chen Guo An
(Navy 92730 572016)
Ocean transportation is a most important form of transportation in international commodity exchange.The bad weather on the ocean always causes damage to the ships.As a result,ship weather routing is necessary.Routes of ships on voyage should be adjusted or replanned because of the influences of heavy weather or had situation in local sea area.In this paper we present an optimal route planning approach based om a dynamic access network model,the meteorological information provided to the shipping news network as a data source,and using improved algorithm.
route planning;weather routing;dynamic access network;optimal decision
U692.3+1
A
1004-7344(2016)31-0256-02
2016-10-21
