激光雷达与人工对云高观测结果的比较
2016-08-08莫伟强尹淑娴
莫伟强, 尹淑娴
(东莞市气象局,广东东莞 523086)
激光雷达与人工对云高观测结果的比较
莫伟强, 尹淑娴
(东莞市气象局,广东东莞523086)
摘要:使用MTECH 8200-CHS云高仪于2014年1月18日至2015年5月31日观测的云高数据与人工观测进行对比分析,以检验仪器的性能,结果表明器测云高比目测偏高,仪器对于低云的观测效果较好以及在夜间的观测能力较白天好。二者差异的主要原因是由观测范围、数据采集时效及人工观测受主观影响等因素引起的。
关键词:应用气象; 云高; 激光云高仪; 目测; 东莞
云是影响天气气候的重要因子之一[1]。云的类型、云量以及云高在天气气候中所起的作用各不相同[2-4],中、低云由于云顶对太阳辐射较强的反射而使大气和地表降温,而高云则相反,高云由于对太阳辐射的透射效应以及云体发射红外辐射而使得大气与地表升温。如何准确、及时地获取云的信息,对于气候学研究、气象预报、人工影响天气以及国民经济和军事等诸多领域都十分重要[5]。目前云的观测主要是依据《地面气象观测规范》进行人工观测测站上空云状、云量和云底高度,但目测存在着主观性强、观测不连续、观测时次较少等的制约,对于天空中云及天气的实时变化的观测能力较差。在当前气象要素观测自动化发展形势下,利用自动化程度高、可连续测量的云高仪来代替人工目测将成为趋势[6]。
科技工作者先后研制出了激光雷达、激光云高仪、红外云高仪以及毫米波云雷达等多种先进设备,可以不间断地对云底高进行自动化观测,并开展了对比观测研究[5,7-8]。激光雷达是其中一种常用的气象观测设备,可用于测量云与气溶胶[9-10]、气温[11-12]、气体浓度[13]等多种要素的垂直廓线,其中用于测量云与气溶胶的米散射激光雷达与激光云高仪在本质上是一样的,都可以测量云底高度。本研究利用装在东莞市气象局观测场的8200-CHS激光雷达云高仪反演的云高数据与人工目测数据进行对比分析,以检测该设备对云高观测的性能,为激光雷达的云高自动化观测提供初步依据。
1观测仪器、数据资料及处理方法
本研究使用安装在东莞市国家基本气象观测场的MTECH 8200-CHS云高仪,该仪器主要使用脉冲激光测距技术,即通过测量脉冲光从云高仪发射器到达云底后向散射,再回到云高仪接收器所需要时间,从而计算出目标物的距离。其主要参数:探测高度:10~8 200 m、采数间隔30 s、采数扫描间隔30 s、输出分辨率:3 m、精度:<7 m、激光源:InGas激光二极管(波长:905 nm)[14]。
数据资料:2014年1月18日—2015年5月31日(其中2014年12月1日—2015年1月6日因为使用不同的模式观测,所以不作统计)东莞国家基本气象站的每天08:00、11:00、14:00、17:00、20:00 (北京时,下同),共5次定时人工观测云高资料和位于同一地点的8200-CHS云高仪所测云高资料。
分析方法:将云高细分为h<1 000、<1 500、<2 000、<2 500 以及≥2 500 m几个等级,以及分为低云、中云和高云3个等级2种方法。
2结果及分析
2.1总体结果
云主要分为3族10属29类,3族分别是低云族、中云族、高云族,通常高度为低于2 500、2 500~5 000、5 000 m以上,现将低云族按500 m的高度划分为几个区域,Band0表示人工目测和器测云高在同一区域内,Band1表示人工目测和器测云高相隔1个层次正负差500 m,其中包括在同一区域云高,有时天空无云或布满云层,但激光脉冲无法返回,缺测表示人工目测有云,云高仪数据为“99999”或漏报,人工目测和器测云高对比见表1。从表1可以看到,8200-CHS云高仪在该时段内所测云高的缺测率为4.1%,Band0为15.2%,Band1为8.7%,剔除云高仪的缺测数据,用有效数据来统计,Band0为15.8%,Band1为9.0%,Band0和Band1相加达到24.8%。

总体来看,仪器的缺测率较低,仪器可用性较好。器测云高比人工目测云底高度要高,其中,1 500 m以内的云,人工目测和器测结果较接近。对于≤2 500 m的中低云云高,云高仪所测和人工目测还是有较好的一致性,而仪器>2 500 m时,二者的差异较大。
2.2不同高度的比较
将仪器和人工目测全部观测资料及按仪器所观测的高度分为低于2 500、2 500 ~5 000、5 000 m以上3种情况的对比,再将仪器观测与人工观测的云高相减求绝对值,再按绝对值分为500以下、500~1 500、1 500~3 000、3 000~5 000、>5 000 m 5个级别。得到的结果见表2,从表2中可以看到,当仪器观测到的高度<2 500 m时,二者的相差在1 500 m以内的占82.1%,而差值在500 m以内的占32.6%;而当器测高度测在2 500~5 000 m时,差值在3 000 m以内的占47%,其余的都是差值在3 000~5 000 m之间;而当器测高度>5 000 m时,二者的偏离则比较大,大部分的差值在3 000 m以外,尤其是差值在5 000 m以外的占50%。从表二中的对比可以看到,仪器对于2 500 m以内的低云与人工有较高的吻合度,仪器对于低云的观测能力较好,而对于5 000 m以外的高云,仪器的偏差比较大,仪器对于高云的观测能力较差。

表2 不同高度的云仪器与人工目测的差值范围个数
2.3不同时次比较
图1为不同时次(08:00、11:00、14:00、17:00和20:00)人工目测与器测对比图。从图1中可看到,08:00和20:00器测和人工目测一致性较好,特别是20:00最为相似,其余时次离散度较大。这是由于以光学作为检测手段的激光雷达,其接收的大气回波信号往往很弱,且随着探测高度的增大,回波信号强度以高度平方的倒数递减造成的。同时,由于光电探测器件产生的暗电流、信号处理电路元件产生的热噪声以及天空背景光等杂散光均使得激光雷达的远场数据很容易淹没在噪声之中[15]。而背景噪声的波动具有明显的日变化,因为白天受太阳辐射、天空辐射、热辐射等影响,其值波动较大;晚上主要受热辐射、灯光等的影响,其值波动较平稳。阴天的背景噪声相比晴天的背景噪声整体偏低,且波动较小。
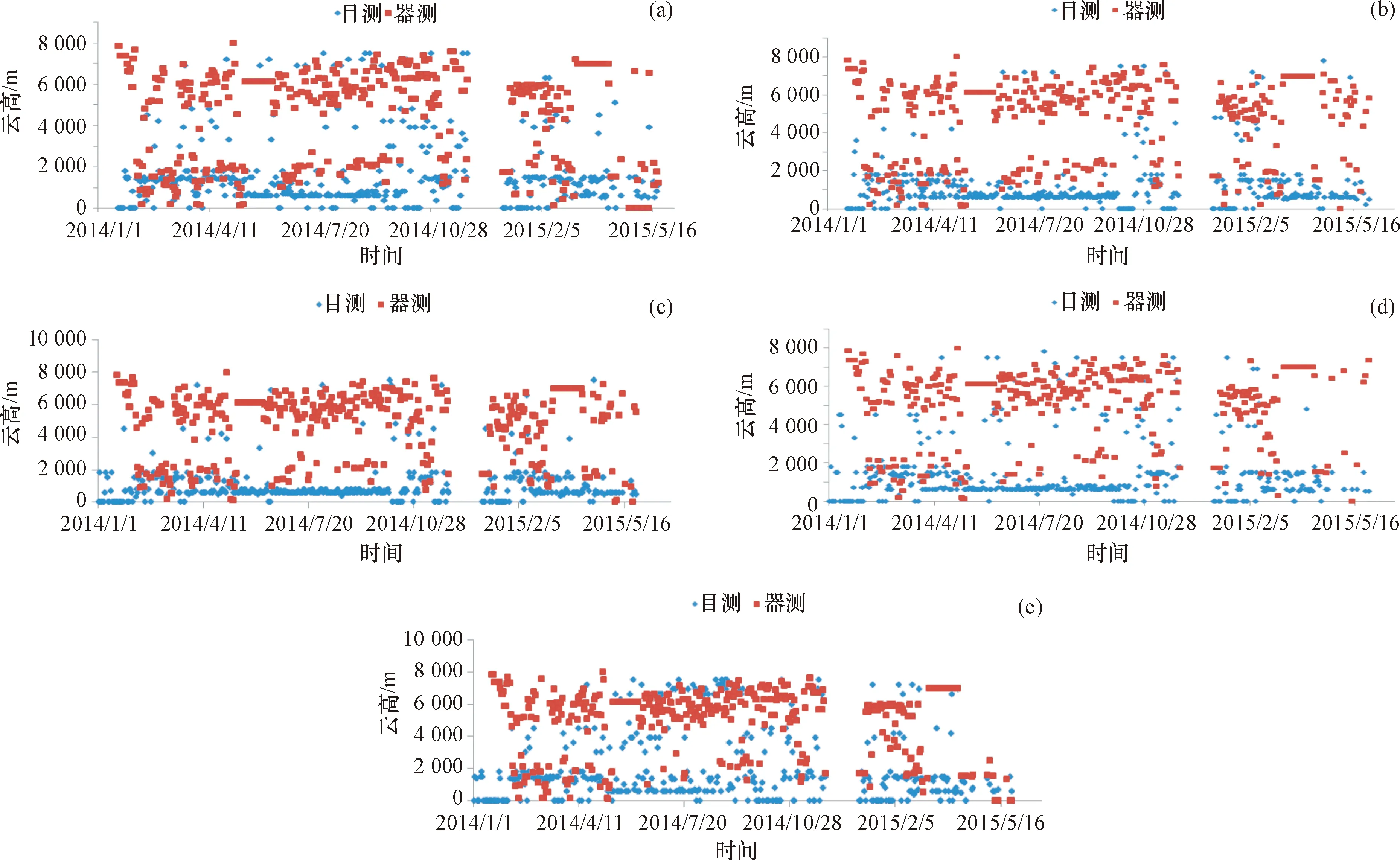
图1 08:00(a)、11:00(b)、14:00(c)、17:00(d)和20:00(e) 8200-CHS云高仪器与人工目测云高的散点图
2.4晴雨天气的比较
将有雨时刻的与晴天的有效观测数据进行对比(图2)。从图2中可见,雨天时(图2a)目测曲线与器测曲线吻合度较小,而晴天(图2b)两曲线吻合点较多。将仪器观测与人工观测的云高相减求绝对值,雨天的差值较小,仪器观测值普遍高于人工观测值,东莞的降水云层主要是低层云降水,所以两者差距不大,致使整个的平均对比值不大。
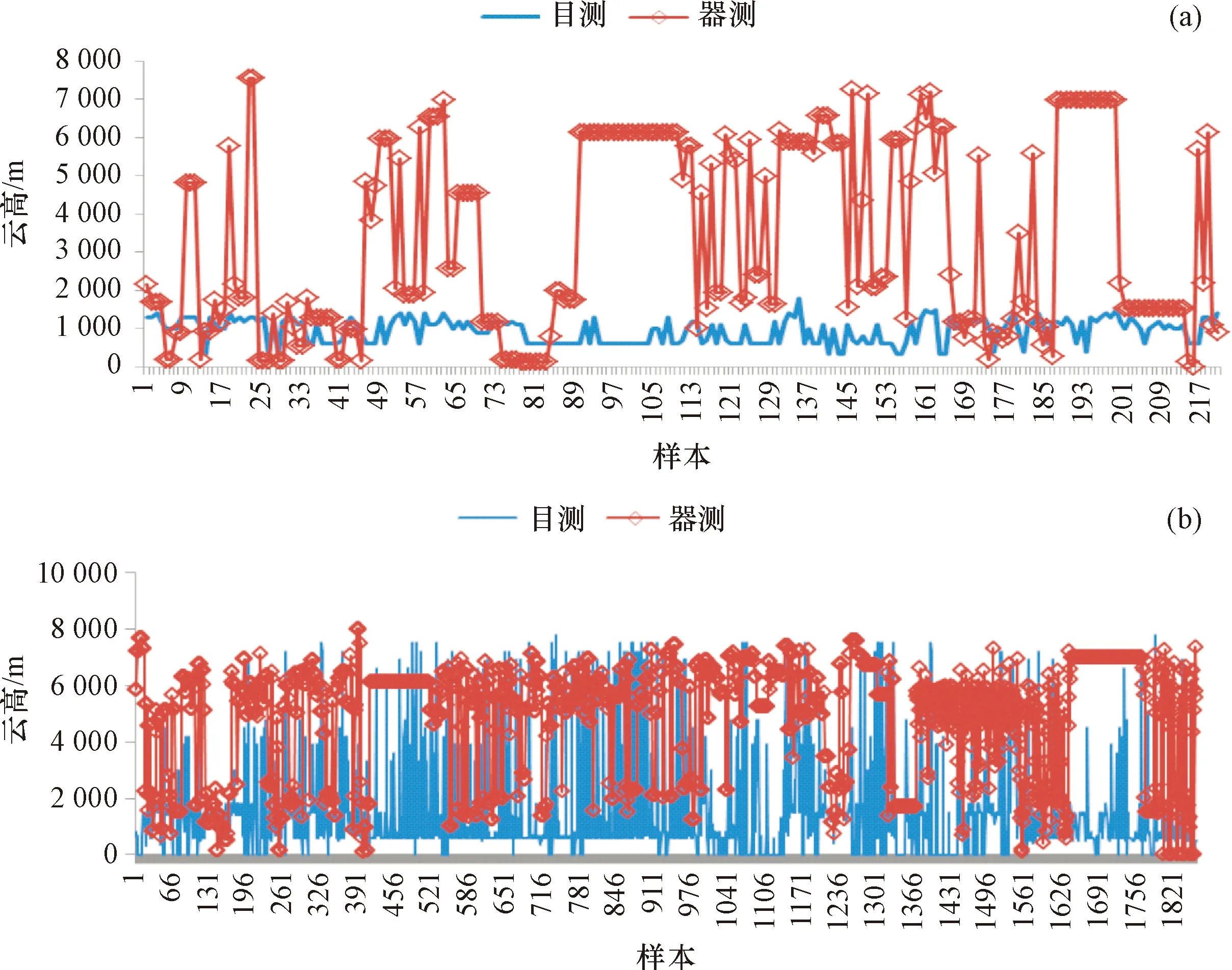
图2 雨天(a)和晴天(b)8200-CHS云高仪与人工目测云高对比曲线
3差异的原因分析
通过对自动观测和人工观测方式的对比,可知二者差异的主要原因是:
1)观测方式不同。人工观测的云量云高通过人眼观测测站整个天空视野,而激光云高仪是通过测量脉冲光测距,所测是激光发射到达的一个点。
2)数据采集时间不同。根据《地面气象观测规范》的要求,一般情况下,人工观测的时间为正点前45~60 min,距正点时间约相差十多分钟,而云高仪所测数据一般是采用正点值[16-17]。
3)人工观测受主观影响较大,器测有时测不到所需部位,无法全面反映天空的真实情况,再加上仪器测定受污染物、降水物等的影响很大,也容易产生误差[18]。
4)由于东莞降水主要来自低层云,雨天时器测与人工观测值平均对比差值比晴天小。
4结论
通过安装在东莞市气象局观测场的MTECH 8200-CHS云高仪所观测的云高数据与同一地点的人工观测的云高数据对比分析,得出以下结论:
1)仪器的缺测率较低,仪器可用性较好,但器测云高比目测云底高度要高,其中,1 500 m以内的云,人工目测和器测结果较接近。
2)仪器对于2 500 m以内的低云与人工有较高的吻合度,仪器对于低云的观测能力较好,而对于5 000 m以外的高云,仪器的偏差比较大,仪器对于高云的观测能力较差,器测的云高比人工偏高较多。
3)在夜间仪器的观测和人工目测一致性较好,白天离散度较大。
参考文献:
[1]杨大生.基于星载云廓线雷达观测资料对中国地区云属性参量的时空分布特征分析[D].北京:中国科学院,2009.
[2]Hahn C J,Rossow W B,Warren S G.ISCCP cloud properties associated with standard cloud types identified inindividual surface observations[J].Journal of Climate,2001,14(2001):11-28.
[3]Hartmann D L,Ockert-Bell M E,Michelsen M L.The effect of cloud type on earth’s energy balance:Globalanalysis[J].Journal of Climate,1992,5(10):1157-1171.
[4]Wang Zhien,Sassen K.Cloud type and macrophysical property retrieval using multiple remote sensors[J].Journal of Applied Meteorology,2001,40(10):1665-1683.
[5]章文星,吕达仁.地基热红外云高观测与云雷达及激光云高仪的相互对比[J].大气科学,2012,36(4):657-672.
[6]高太长,刘磊,赵世军,等.全天空测云技术现状及进展[J].应用气象学报,2012,21(1):101-109.
[7]黄兴友,夏俊荣,卜令兵,等.云底高度的激光云高仪、红外测云仪以及云雷达观测比对分析[J].量子电子学报,2013,30(1):73-78.
[8]胡树贞,马舒庆,陶法,等.地基双波段测云系统及其对比试验[J].应用气象学报,2012,23(4),441-450.
[9]Comstock J M,Ackerman T P.Ground-based lidar and radar remote sensing of tropical cirrus clouds at NauruIsland:Cloud statistics and radiative impacts[J].Journal of Geophysical Research Atmospheres,2002,107(D23):AAC 16-1-AAC 16-14.
[10]Devara P C S,Raj P E,Dani K K,et a1.Mobile lidar profiling of tropical aerosols and clouds[J].Journal of Atmospheric and Oceanic Technology,2008,25(8):1288-1295.
[11]吴永华,胡欢陵,胡顺星,等.激光雷达探测平流层中上部大气密度和温度[J].量子电子学报,2000,17(5):426-431.
[12]吴永华,胡欢陵,胡顺星,等.瑞利-拉曼散射激光雷达探测大气温度分布[J].中国激光,2004,31(7):851-856.
[13]张寅超,胡欢陵,邵石生,等.北京市大气S02,NO2和O3的激光雷达监测实验[J].量子电子学报,2006,23(3):346-350.
[14]8200-chs User Guide Installation Handbook Maintenance Handbook Troubleshooting Guide[Z].北京:天诺基业有限公司,2012.
[15]杨成武,刘文清,张玉钧.激光云高测量去噪算法研究[J].光散射学报,2012,24(1):98-103.
[16]李勇增,郑细华.如何应用卫星云图和雷达回波观测夜间云[J].广东气象, 2008,30(2):65-66.
[17]刘小容,罗锡浪.如何提高地面气象测报质量[J].广东气象,2008,30(6):62.
[18]朱补全,梅士龙.能见度自动仪与人工观测资料对比分析[J].浙江气象,2010,31(2):25-28.
收稿日期:2015-10-08
基金项目:广东省气象局科研项目(2012C02)
作者简介:莫伟强(1981年生),男,硕士研究生,工程师,主要从事气象服务、气象探测工作。E-mail:sharkmo@qq.com
中图分类号:P49
文献标识码:A
doi:10.3969/j.issn.1007-6190.2016.01.014
莫伟强, 尹淑娴.激光雷达与人工对云高观测结果的比较[J].广东气象,2016,38(1):57-60.