基于MRDS的多自由度焊接机器人运动学求解及仿真
2016-08-08周大良
周大良
(中国电子科技集团公司第四十八研究所,湖南长沙410111)
基于MRDS的多自由度焊接机器人运动学求解及仿真
周大良
(中国电子科技集团公司第四十八研究所,湖南长沙410111)
以七自由度焊接机器人为研究对象,采用D-H法建立了数学模型,进行了正运动学和逆运动学算法分析。采用三维软件和MRDS对机器人进行联合建模,并基于MRDS对焊接机器人进行了仿真,利用Robotic Toolbox进行了相同的仿真实验,通过对位移、速度和加速度等仿真结果的对比分析,验证了MRDS下模型的正确性和仿真结果的可靠性。仿真系统能在较真实的环境下观察仿真过程且仿真效果逼真,奠定了机器人研究人员进行离线编程和仿真软件开发的基础。
焊接机器人;运动学算法;仿真
焊接环境与其他加工环境相比,存在热辐射大、烟尘多、劳动条件差和危险性高等不利条件。可利用焊接机器人来代替工人从事焊接工作,提高效率的同时能保证焊接质量,最重要的是减少了工人在这种恶劣环境下的作业时间,降低劳动强度。近些年来,焊接机器人被广泛用于各个领域,包括石油化工、汽车零部件制造、航空航天和造船等。机械手的平稳运行和末端位姿的准确到位是保证焊接机器人高质量完成焊接工作的关键,因此焊接机器人的研发过程中需进行轨迹设计和运动学分析[1]。
MRDS是一个通用的机器人仿真和控制平台,它包括4个主要组成部分:协调和并发运行库(CCR);可视化编程语言(VPL);分布式软件服务(DSS);可视化仿真环境(VSE)。MRDS系统采用分布式通讯架构,实现多种硬件平台的跨越;具有功能强大的实时物理引擎;编程语言模块化可视化,适用多种应用的广泛开发[2]。本文对七自由度焊接机器人进行了正运动学和逆运动学求解,并基于MRDS建立了仿真系统对机器人进行仿真。
1 焊接机器人运动学分析
机器人的运动学研究有两类问题,分别为运动学正解和运动学逆解问题。所谓运动学正解就是根据预先给定的关节转角角度值求末端执行器的位置与姿态;而运动学逆解就是在末端位置与姿态已知的情况下求对应关节转角的角度值。
1.1正运动学求解
可用一系列相连的连杆来将多自由度机器人的结构简化,每个连杆i的动作均可用连杆长度ai-1、连杆距离di、连杆扭角 αi-1和关节转角θi4个运动学参数来确定。图1所示为七自由度机器人的D-H坐标系,其中a1和a4分别为150 mm和200 mm,d3和d5分别为614 mm和640 mm;表1为各个连杆的参数。
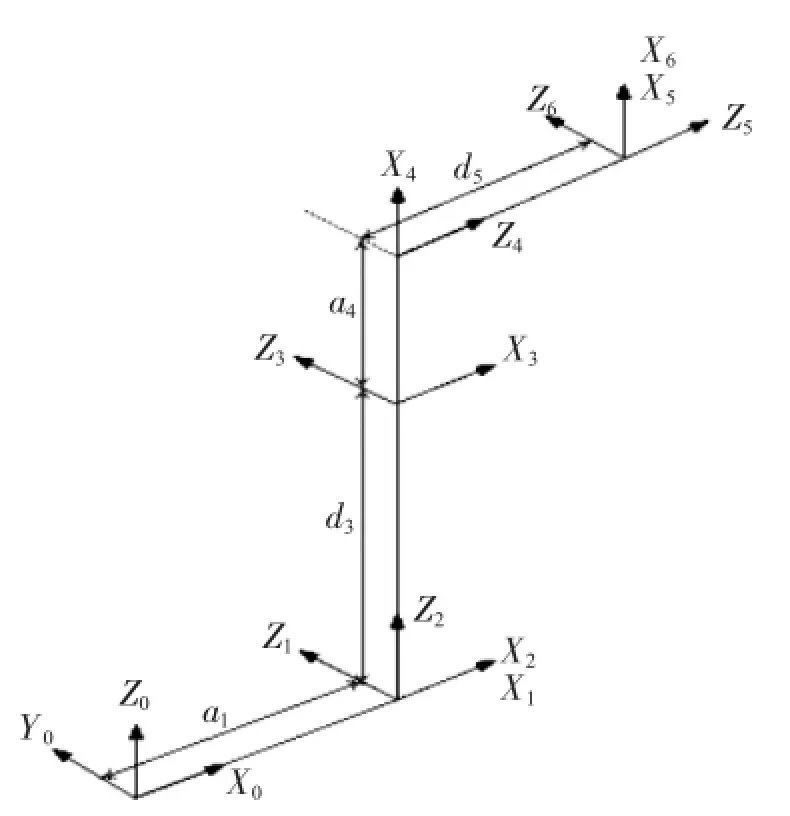
图1焊接机器人D-H坐标系
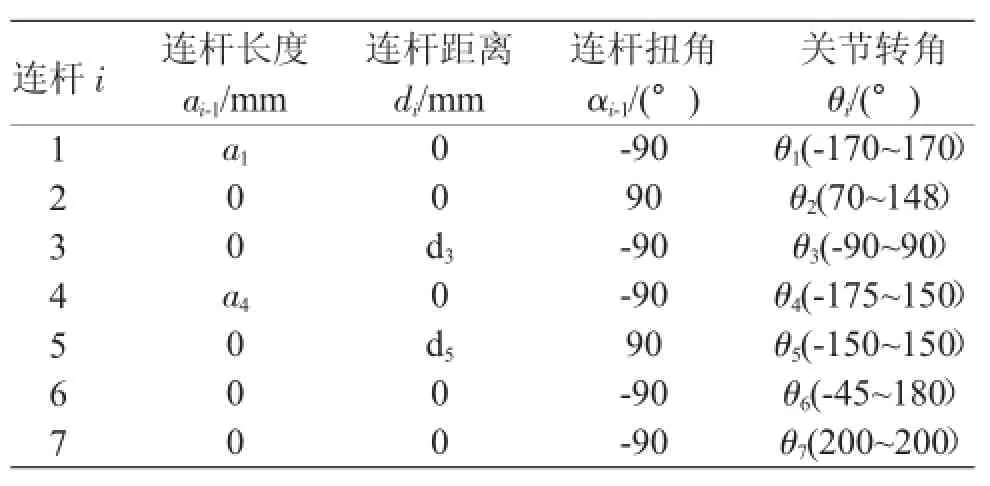
表1焊接机器人连杆参数
建立运动学模型及求解末端位姿是焊接机器人正运动学的研究内容[3]。用i-1iT来表示连杆坐标系{i}与{i-1}的关系,相对于基坐标系连杆i的变化为:

其中,i-1iT为相邻连杆坐标变化通式,可用下式表示:
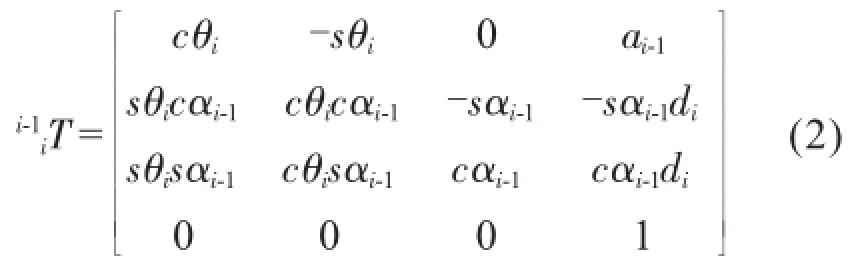
式其中:cθi=cos θ;sθi=sin θi;sαi=sin αi;cdi= cosdi。由通式得:
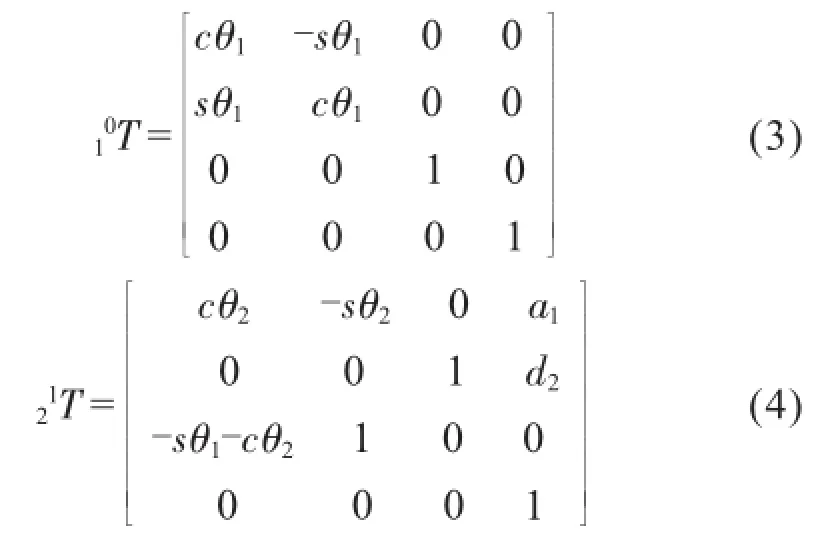
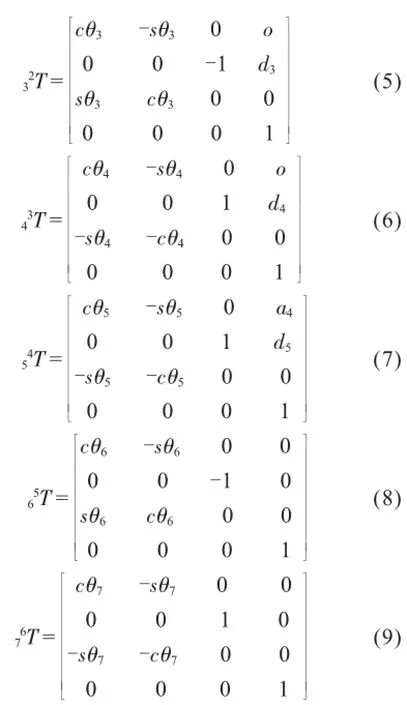
正运动学方程可表示为:
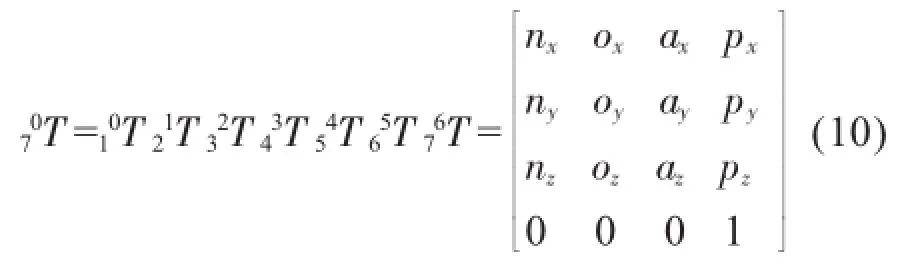
其中,相对于基坐标系机器人末端中心x、y和z方向的位移分别为px、py和pz,前三列为x、y和z轴的方向余弦。因为在运动学的求解涉及到大量的矩阵计算,所以采用MATLAB进行编程求解。
1.2逆运动学求解
机器人逆运动学关系到离线编程、运动分析和轨迹规划,它是将机器人末端位姿转化成关节量。本文对机器人的逆运动学求解采用臂腕分离法,根据末端执行器的位置矢量和姿态转换矩阵,对前4个和后3个关节变量进行分开求解。
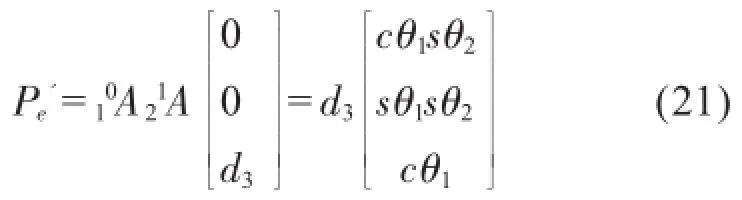
首先将关节变量θ3做虚化处理,设为零,这样七自由度焊接机器人转换为六自由度求解,当θ3=0时,用θ1'、θ2'、θ3'来表示求出的前3个关节变量。图2和图3所示分别为七自由度焊接机器人的结构示意图和六自由度机器人前3个关节结果简图,由图2可得:
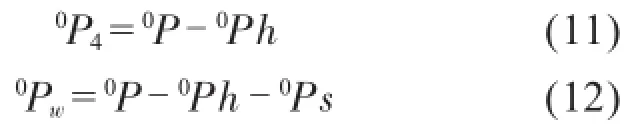
式中0P和0Ph分别为基础坐标系下末端执行器端部中心点和末端执行器中心点的矢量。
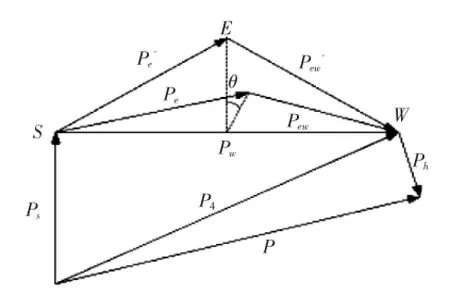
图2七自由度焊接机器人结构示意图
由图3可知,在平面X0Y0内关节2、3变量的变化投影不变,由P4可求得θ1',设r=P4x2+P4y2,sθ1'=P4x/r,cθ1'=P4y/r。求得:

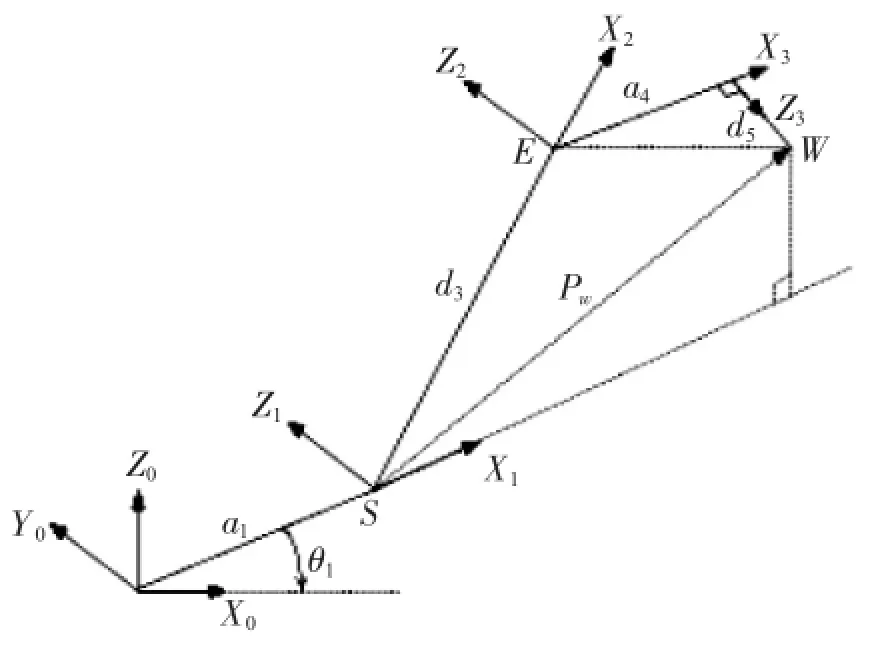
图3六自由度机器人前3个关节结构简图
图4所示为X1Y1平面内关节2、3的投影,由余弦定理和正切:
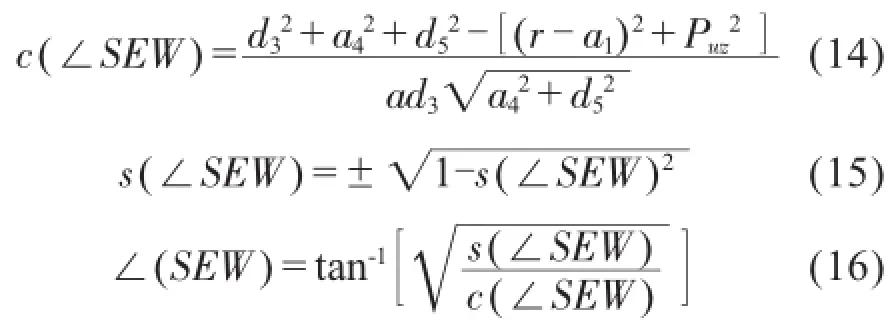

由式(16)和式(17)可得:

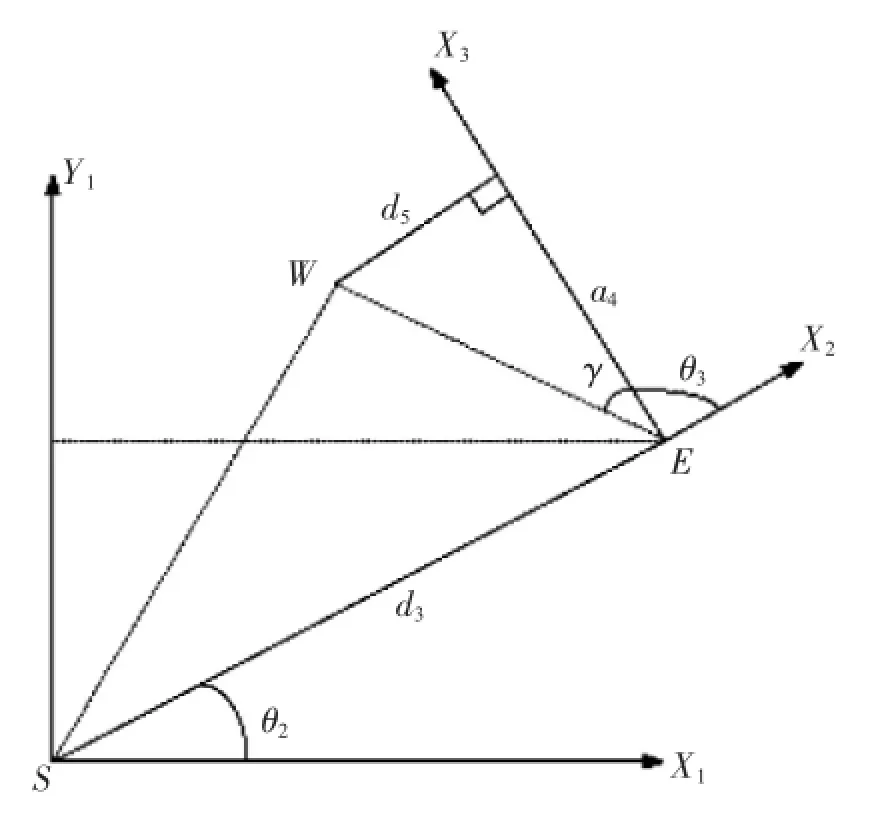
图4关节 2、3在参考坐标系{1}表示
参考图3,可由1Pw求出θ2':
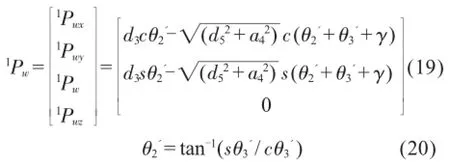
由图3分析,θ1虚化后求得的θ1'=θ1,θ3'=θ4,其中θ1和θ4为1、4关节变量。由图2可知,当θ=0时:

由图3求得:

可以腕部和肘部的矢量来表示小臂的矢量公式,因为关节变量θ1、θ2和θ4已经确定。
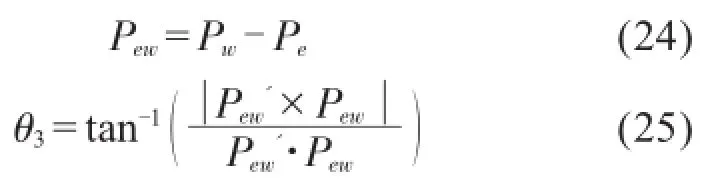
相对于前臂,腕部的位姿矩阵为:
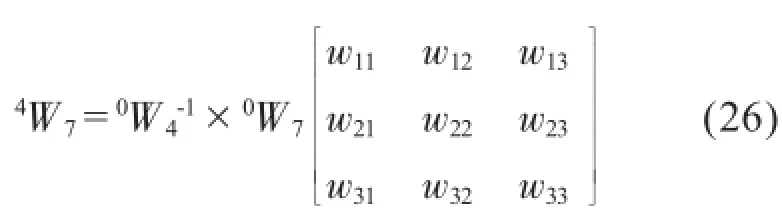
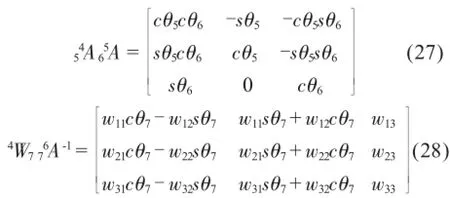

同理求出:
至此,已求出七自由度焊接机器人的全部关节变量。
2 焊接机器人仿真
2.1基于MRDS的焊接机器人仿真
本文采用三维软件和MRDS联合建模的方式,将焊接机器人分解为底座、大臂、小臂、立柱、手腕等8个子项分别进行几何建模,图5为机器人在MRDS中显示的初始状态下3D模型。在MRDS下对模型进行仿真来验证的运动学求解和轨迹规划过程,关节变量和末端执行器的位姿也可通过仿真来求解及分析。机器人的运动可通过在控制界面设定7个关节角度来控制,机器人末端位置和姿态也能够实时计算得出。图6所示为对初始关节进行运动角度设置后的状态,由(0,0,0,0,0,0,0)到(-45,20,10,30,25,-20,-10),计算出机器人的末端位置和姿态变量分别为(0.2183,0.6766,0.2286)和(58.57,25.58,147.68)。
2.2基于MATLAB的焊接机器人仿真
Robotic Toolbox工具箱提供了机器人动力学和运动学的正解和逆解,能有效的进行仿真和分析多自由度焊接机器人的运动。将机器人数学模型中关节的运动参数(如速度、加速度和位移)转换成时间函数,采用数值分析方法求出离散时间点对应的运动参数值。图7至图9所示为所测的第2、3关节的位移、速度以及加速度随时间变化的曲线,图10所示为机器人末端的位移随时间的变化曲线,设置运时间间隔为20 ms,总时间为2 s。由图可知,这两个关节以及末端的各个运动参数均没有出现突变
图5机器人初始状态
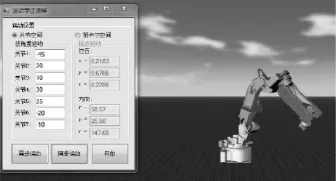
图6机器人设置后的状态
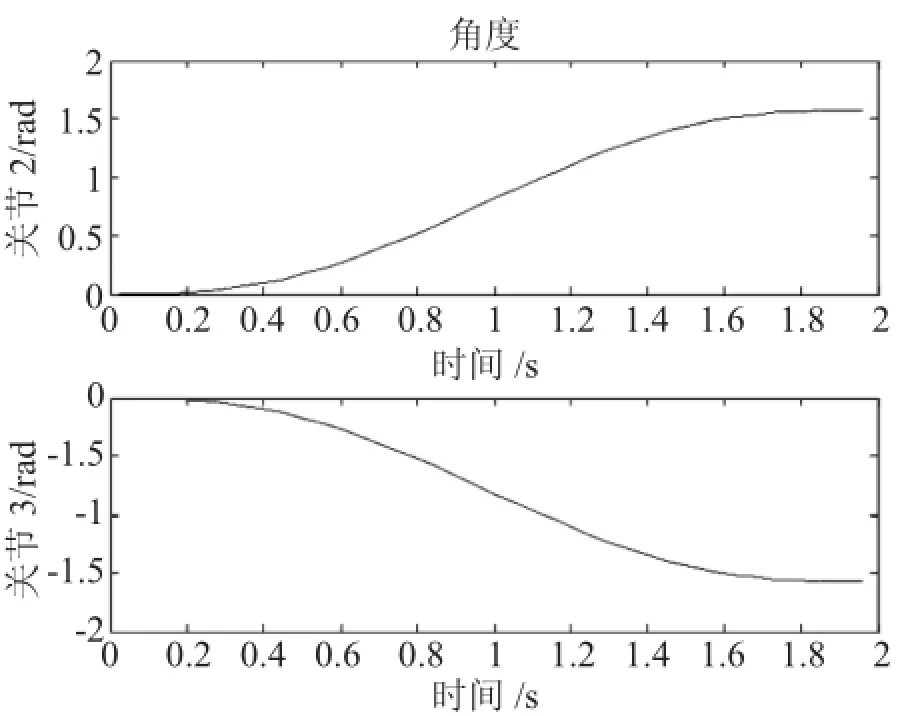
图7关节2、3位移曲线
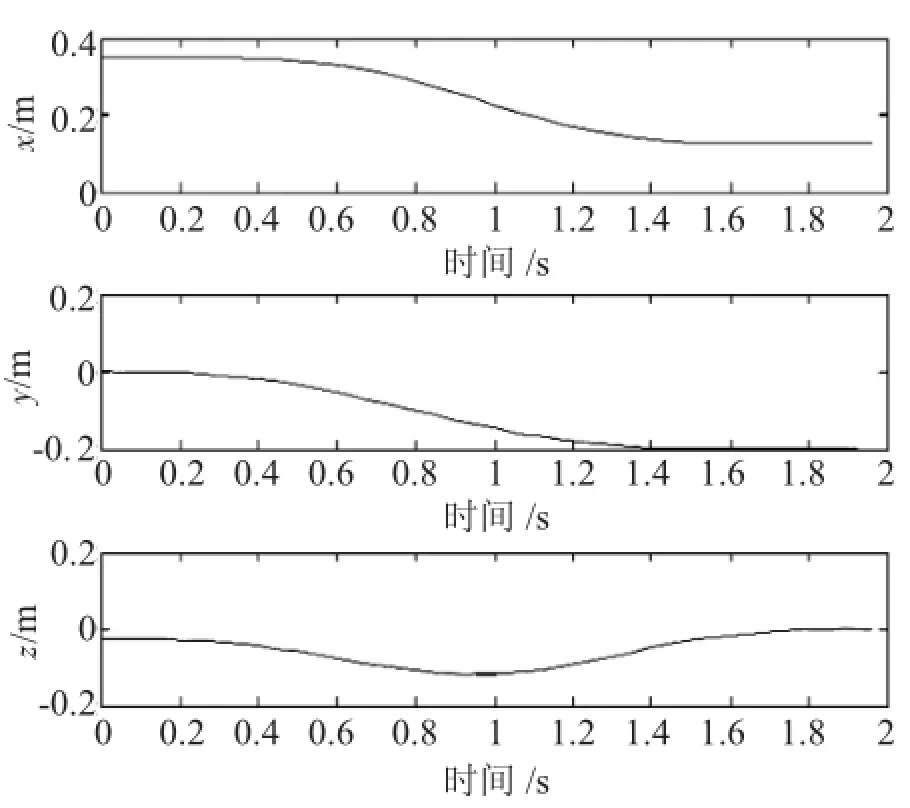
图8机器人末端位移曲线
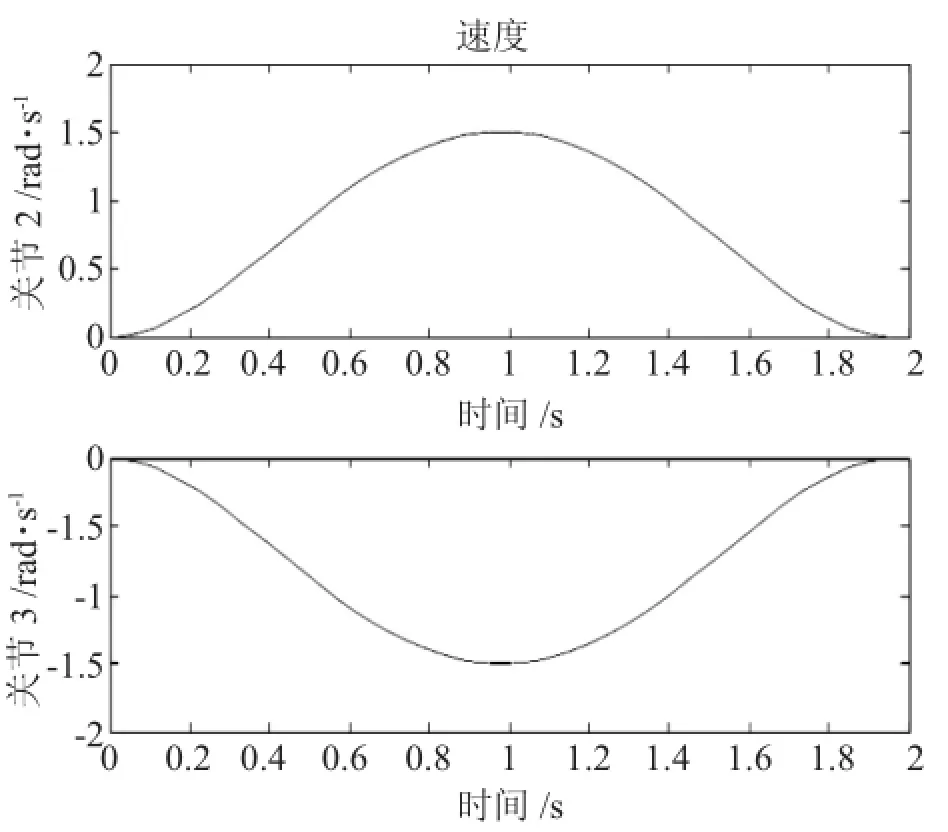
图9关节2、3速度曲线
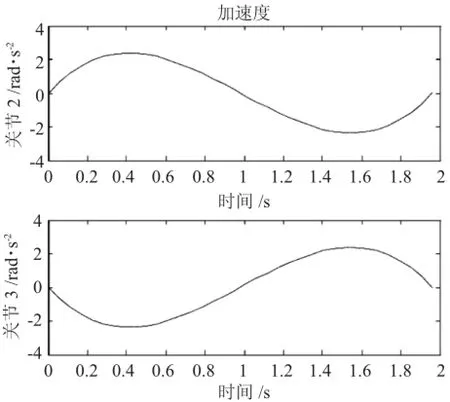
图10关节2、3加速度曲线
现象,变化曲线复合一般运动学规律。
2.3轨迹规划仿真
首先设置轨迹规划参数,设定所需轨迹点,然后选择规划方式进行仿真,仿真结束后用户可根据系统自动弹出的运动参数曲线图直观的观察仿真结果,进一步分析机器人的运动。图11所示为机器人末端在不同轨迹规划方式(关节空间、笛卡尔空间)下的位移变化曲线,可以看出,在笛卡尔空间下,末端的位移曲线存在突变;而在关节空间下,没有突变,呈连续缓和的变化趋势。这是因为笛卡尔空间下,运动逆问题的求解会产生很多问题。
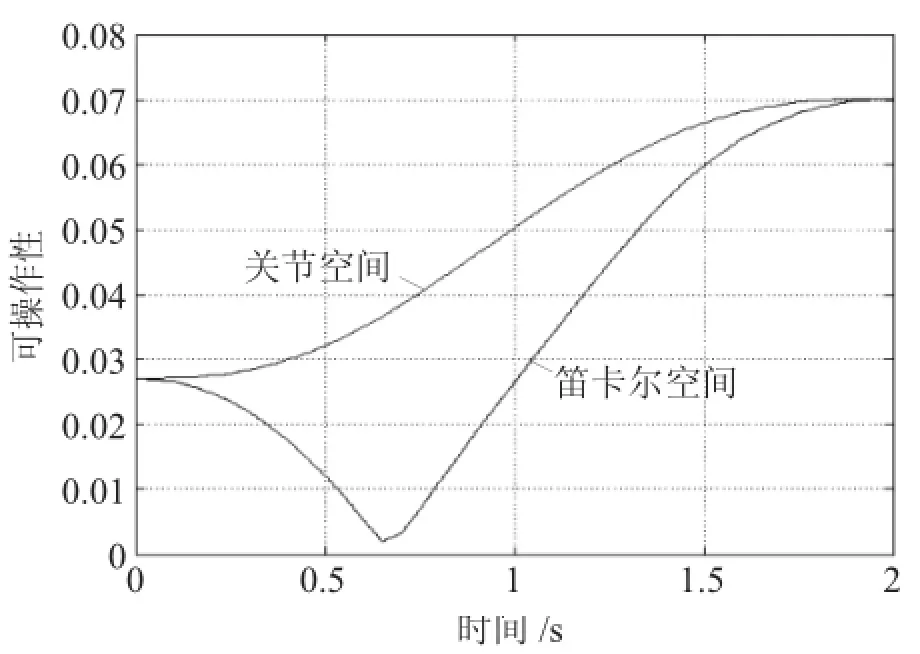
图11不同轨迹规划方式下的机器人运动路径
3结论
本文以多自由度焊接机器人为例,进行了正运动学和逆运动学分析;基于MRDS对焊接机器人进行了仿真,并利用Robotic Toolbox进行了相同的仿真实验,通过仿真结果的对比分析,验证了MRDS下模型的正确性和仿真结果的可靠性。仿真系统能在较真实的环境下观察仿真过程,仿真效果逼真,奠定了离线编程软件开发的基础。奠定了机器人研究人员进行离线编程和仿真软件开发的基础。
[1] 王玉,王旗华,赵建光,等.焊接机器人虚拟样机轨迹模拟和运动仿真分析[J].焊接学报,2012,33(4):110-112.
[2] 王宏,张东来,李兵.基于MRDS的工业机器人仿真研究[J].机械设计与制造,2010,(8):152-154.
[3] 余晓流,刘进福,王丽芳,等.基于ADAMS的六自由度焊接机器人运动学分析及仿真[J].安徽工业大学学报,2012,29(1):49-53.
[4] Phlip J Schneider,David H Eberly.计算机图形几何工具算法详解[M].北京:电子工业出版社,2005.
The Solution of Kinematics and Simulation of Multi DOF Welding Robot Based on MRDS
ZHOU Daliang
(The 48thResearch Institute of CETC,Changsha 410111,China)
Seven DOF welding robot was taken as the object of study in this paper,mathematics model was established by using the method of D-H,the forward kinematics algorithm and the inverse kinematics algorithm was analyzed.The robot model was established by using 3D software and MRDS,simulation of welding robot based on MRDS was carried out,and the same simulation experiment was carried out by using Robotic Toolbox.The correctness of model and the reliability of the simulation results was verified by the comparison of experiment results such as displacement,velocity and acceleration.The simulation system is able to observe the simulation process in a real environment and simulation effect is lifelike,it is a base for robotics researchers to develop offline programming and simulation software.
Welding robot;Kinematics algorithm;Simulation
TP242
A
1004-4507(2016)06-0007-06
2016-05-04
