电液伺服阀和非对称液压缸匹配特性的试验研究
2016-08-08张永兴赵洪伟
张永兴,赵洪伟
(1.中国飞机强度研究所,陕西 西安 710065;2.全尺寸飞机结构静力/疲劳实验室,陕西 西安 710065)
电液伺服阀和非对称液压缸匹配特性的试验研究
张永兴1,2,赵洪伟1,2
(1.中国飞机强度研究所,陕西 西安 710065;2.全尺寸飞机结构静力/疲劳实验室,陕西 西安 710065)
摘要:电液伺服阀和非对称液压缸是大型飞机结构强度试验中主要的加载设备。目前,对二者的匹配性问题未给予充分重视,可能造成其组成的试验加载设备工作能力不足,影响飞机结构试验运行。为此,本文搭建了悬臂框架结构试验平台,对吨位2t、行程1m的液压缸和3种穆格公司的伺服阀进行了匹配性的研究。通过试验研究,确定了控制器比例增益P的边界。在P增益的边界内,P最大时二者匹配性最好。本文研究结果对结构试验加载设备工作性能有较大提升,为大型飞机结构试验的阀控缸系统的选型和设计提供了方法。
关键词:飞机结构;强度试验;电液伺服阀;非对称缸;匹配性;比例增益
1引言
近年来,国家对航空工业越来越重视,新机研制事业的发展越来越快,所以对新机试验的要求也越来越高[1]。电液伺服阀和非对称液压缸作为飞机结构试验中的主要动力元件,其性能越来越受关注。在试验中,电液伺服阀一般使用三位四通的喷嘴挡板阀,作动缸主要使用非对称缸。非对称缸构造简单,制造容易,单边滑动密封的效率及可靠性高,工作空间小,承载能力大[2]。
目前,结构试验前依靠流量估计选取电液伺服阀,通过载荷估算选取液压缸,对阀和缸的匹配性未给予充分关注,可能造成阀控液压缸系统工作能力不足,控制信号跟踪性能较差,载荷产生振荡或者异响,影响结构试验进程,增加试验风险。所以,阀和缸的匹配性对结构试验的影响较大。
贾兴军针对平衡阀加内泄式液控单向阀的双缸控制系统在下放时的抖动问题,提出了将内泄式液控单向阀改为外泄式液控单向阀的控制方法[3],但只是对双缸和单向阀情况进行了研究,并未给出阀和缸匹配性的具体研究方法。李洪人、王栋梁和李春萍等人对非对称缸电液伺服系统的静态特性进行了分析研究[4]。柏艳红、陈聪等人基于AMESim软件,建立了阀控缸系统的动态模型,进行了线性化分析[5]。李昌、叶正茂等人基于阻抗控制对阀控缸系统进行了动态特性的分析[6]。
本文以吨位2t、行程1m的非对称缸和3种穆格公司的电液伺服阀为研究对象,进行了阀和缸的匹配特性的试验研究。
2试验研究
为了研究阀控液压缸系统的匹配特性,本文搭建了悬臂框架结构试验,如图1所示。试验控制系统是MTS多点协调控制系统,选择其中一个通道。试验件是长2m、宽1m、厚0.1m的钢性框架,安装在承重墙上。液压缸选择吨位2t、行程1m的非对称缸。伺服阀选择穆格公司生产的3001B型、3002B型、3003B型伺服阀。液压油为46号抗磨液压油,工作压力为21MPa。

图1 外场悬臂框架试验装置
试验中,控制器给定信号为正弦信号,振幅为1kN,频率为0.1Hz。将非对称缸分别和3种型号伺服阀组装,顺序为3001B、3002B、3003B。结构试验采用经典PID控制,通过调节控制参数对二者匹配性进行研究。由于微分增益D对阀控缸系统影响较大,试验中一般设置为0,主要调节的是比例增益P,而积分增益I次要调节,本文基于此原则进行试验研究。
2.1穆格3002B型伺服阀和非对称缸组装情况
试验中可实时在线调节增益P,所以不用将每个P对应的曲线全部给出,只在一条力反馈曲线上即可得出力反馈随P的变化情况。由于积分增益主要影响稳态误差,所以试验中一般保持积分增益I=1或1.5不变,本文取I=1.5,D=0。为了不失重复性,此种情况共进行4次试验。
第1次试验中,取P=5、10、20、25、30,在每个载荷波峰处改变一次P增益,得到如图2所示的命令和力反馈的曲线。由图可知,随着P增大,载荷跟踪性能越来越好。当P=30时,试验持续了一段时间后发生剧烈振荡,然后试验保护,直接卸载。此时载荷误差约为1.2%,而在P=30之前未发生振荡现象。

图2 命令和力反馈的试验曲线(第1次试验-3002B)
第2次试验中,取P=5、10、15、20、25、26、27,得到如图3所示的命令和力反馈的试验曲线。整体来看,趋势和第1次试验大致相同。此次试验也是在载荷峰值时改变P增益。由图可知,在P=27时,试验维持了一段时间,剧烈振荡,然后试验保护,直接卸载。此时载荷误差约为1.4%,而在P=30之前未发生振荡现象。

图3 命令和力反馈的试验曲线(第2次试验-3002B)
第3次试验中,取P=5、10、15、20、25、26,得到如图4所示的命令和力反馈的试验曲线。此次试验是在载荷过零时改变P增益。整体来看,随着P增益增大,载荷误差越来越小,在P=26时,试验维持了一段时间,剧烈振荡,然后试验保护,直接卸载。此时载荷误差约为1.43%,而在P=26之前未发生振荡现象。

图4 命令和力反馈的试验曲线(第3次试验-3002B)
第4次试验中,取P=5、10、15、20、25、26、26.5,得到如图5所示的命令和力反馈的试验曲线。此次试验也是在载荷过零时改变P增益。曲线的整体趋势和图4大体一致。在P=26.5时,试验维持了一段时间,剧烈振荡,然后试验保护,直接卸载。此时载荷误差约为1.38%,而在P=26.5之前未发生振荡现象。

图5 命令和力反馈的试验曲线(第4次试验-3002B)
通过上述4次试验可以说明,对穆格3002B型伺服阀和非对称缸组装而成的阀控液压缸系统,P增益的边界为26,在边界内P保持最大时,阀和缸的匹配特性最好。
2.2穆格3001B型伺服阀和非对称缸组装情况
为了不失重复性,此种情况同样进行4次试验。
第1次试验中,取P=5、10、15、20、26、30、35、40、45、50,在每个波峰改变一次P增益,得到如图6所示的命令和力反馈的试验曲线。整体来看,试验中随着增益P的增大,载荷控制的精度越来越高,但是逐渐开始起振,然后是剧烈振荡,最后试验保护,直接卸载。图6中,P=26时,误差约为0.97%,P=50时,误差已达到0.5%。但是,当P=35时,力反馈开始起振,P=40和45时振荡非常严重,但是未发生直接卸载。P=50时,试验保护,直接卸载。

图6 命令和力反馈的试验曲线(第1次试验-3001B)
第2次试验中,取P=5、10、15、20、25、30、35、40、45、50,也是在每个波峰改变一次P增益,得到如图7所示的命令和力反馈的试验曲线。趋势和图6大体一致。图中,P=25时,误差约为1%,P=50时已达到0.55%,但是当P=30时力反馈开始起振,P=45时振荡非常严重,但是未发生直接卸载,P=50时,试验保护,直接卸载。
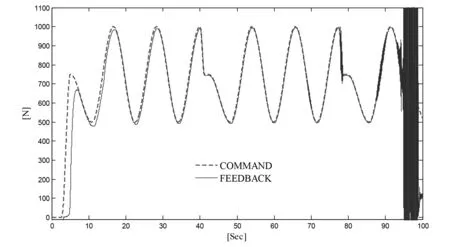
图7 命令和力反馈的试验曲线(第2次试验-3001B)
第3次试验中,取P=5、10、15、20、26、31、35、40、45,本次试验是在每个载荷过零时改变一次P增益,得到如图8所示的命令和力反馈的试验曲线。图中,P=26时,误差约为0.95%,P=45时已达到0.65%,但是当P=30时力反馈开始起振,P=45时,试验保护,直接卸载。

图8 命令和力反馈的试验曲线(第3次试验-3001B)
第4次试验中,取P=5、10、15、20、26、30、35、40、45,本次试验同第3次试验,在每个载荷过零时改变一次P增益,得到如图9所示的命令和力反馈的试验曲线。图中,P=26时,误差约为0.92%,P=45时已达到0.65%,但是当P=30时力反馈开始起振,P=45时,试验保护,直接卸载。

图9 命令和力反馈的试验曲线(第4次试验-3001B)
通过上述4次试验可以说明,对穆格3001B型伺服阀和非对称缸组装而成的阀控液压缸系统而言,P增益的边界为40,但是在P=26之前无振动现象发生,在P=26到40之间频繁发生振动,但是试验能够正常运行,没有卸载,这说明由3001B型伺服阀组成的阀控液压缸系统对振动有很大的抗性,从这一点出发就优于3002B型阀情况。可见,3001B型阀和3002B型阀相比,3001B型阀更适合2t、行程1m的非对称缸。
2.3穆格3003B型伺服阀和非对称缸组装情况
试验中,取P=0.5时,试验才能够加上压力,但是刚刚运行载荷谱,试验即发生卸载,如图10所示。这是因为3003B属于大流量阀,难以有效控制其阀口开度。这说明此种情况下P增益的调试范围较小,该型阀无法工作,3003B型阀和非对称缸的匹配性较差。
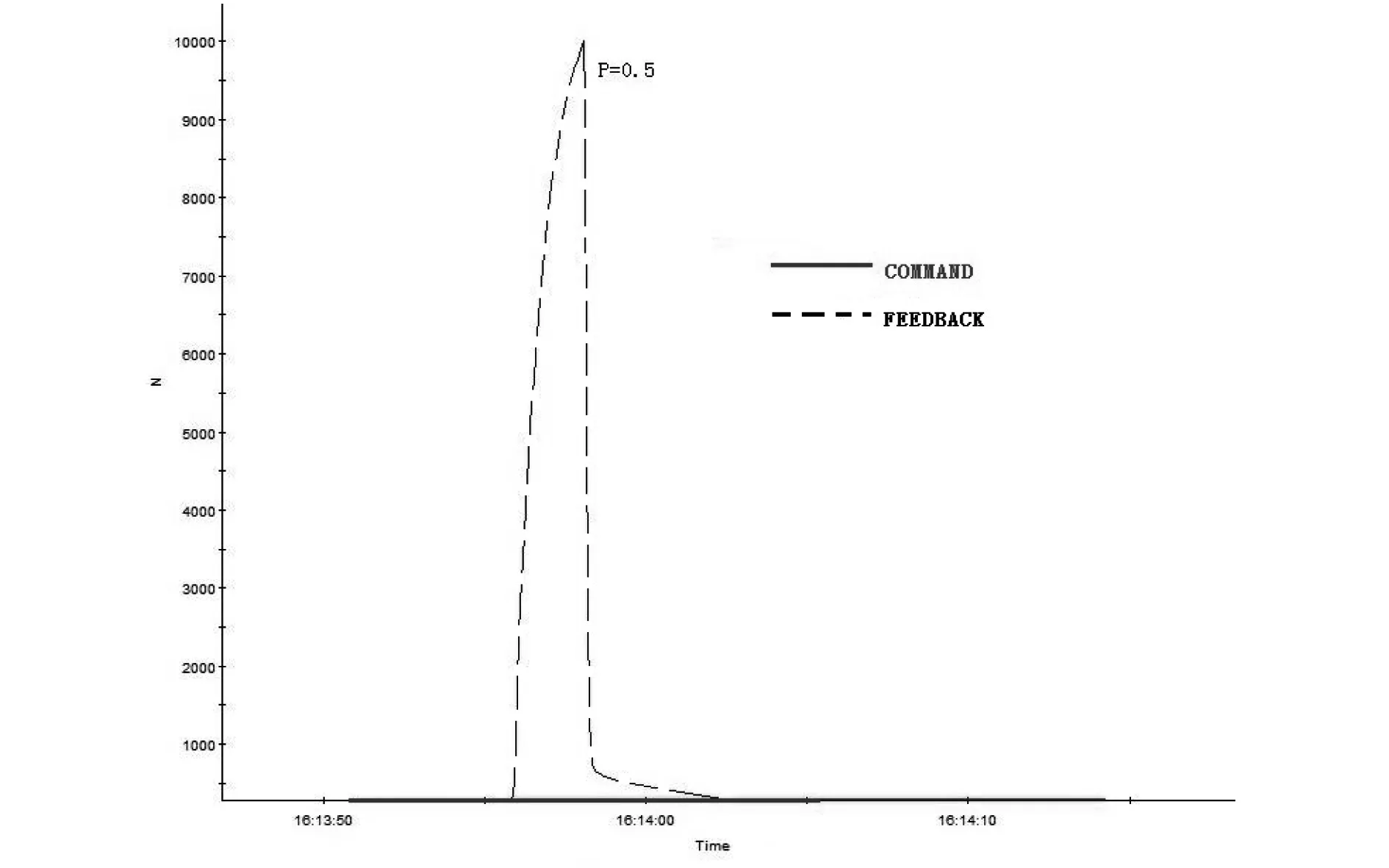
图10 命令和力反馈的试验曲线(3003B)
综上,根据载荷信号的跟踪性能以及振荡情况,可判断和2t、行程1m的非对称缸匹配性较好的是3001B型阀。
3结论
(1)增益P是阀控缸系统匹配性的量度;
(2)增益P和载荷跟踪性成正比,但是较大P会引起载荷振荡;
(3)在P增益的边界内,P保持最大而系统不振荡,此时阀控缸的匹配性最好;
(4)本文方法为大型非结构试验中使用的阀控缸系统的选型和设计提供了一种可行方法;
(5)本文方法为后续阀控缸系统匹配性数据库的建立提供了理论参考。
参考文献
[1]刘金甫.飞机结构疲劳试验系统的研制及其发展动向[J].测控技术,1992,(4):8-9.
[2]张平格.液压传动[M].武汉:华中科技大学出版社,2013.
[3]贾兴军.平衡阀加液控单向阀的双缸控制策略的匹配性研究[J].液压与气动,2003,(7):54-57.
[4]李洪人,王栋梁,李春萍.非对称缸电液伺服系统的静态特性分析[J].机械工程学报,2014,39(2):18-22.
[5]柏艳红,陈聪,孙志毅,等.基于AMESim的电液阀控缸系统线性化分析[J].系统仿真学报,2014,26(7):1430-1434.
[6]李昌,叶正茂,黄其涛.基于阻抗控制的阀控缸系统动态特性分析[J].机械设计与制造,2012,(4):201-203.
[收稿日期]2016-03-21
[作者简介]张永兴(1987-),男,陕西西安人,助理工程师,主要从事飞机结构强度试验测控技术研究工作。
[基金项目]中航工业创新基金项目(2012A62322R)。
中图分类号:TH137.52
文献标识码:B
doi:10.3969/j.issn.1674-3407.2016.02.004
Experimental Study on Matching Property between Electro-hydraulic Servo Valve and Asymmetrical Cylinder
Zhang Yongxing1,2, Zhao Hongwei1,2
(1.Aircraft Strength Research Institute of China, Xi′an 710065, Shaanxi, China;2.Full Scale Aircraft Structural Static/Fatigue Laboratory of China, Xi′an 710065, Shaanxi, China)
Abstract:In aircraft structure strength test, servo valve (SV) and hydraulic actuator (HA) are the key loading equipments. Currently, the matching property between SV and HA isn't considered fully, so the working capacity of loading devices is lack to affect the structural strength test. The structure testing platform of cantilever beam is presented to study the matching property between HA and SV. The test results show that the proportional gain measured is matched to valve controlled cylinder. The study provides a method to choose and design SV and HA.
Keywords:aircraft structure; strength test; electro-hydraulic servo valve; asymmetrical cylinder; matching property; proportional gain
