用于感应电机设计的分布磁路法快速迭代方法*
2016-08-04管少华程思为吴新振
管少华, 程思为, 王 东, 吴新振
(1. 海军工程大学 舰船综合电力技术国防科技重点实验室,湖北 武汉 430033;2. 青岛大学 电气工程系,山东 青岛 266071)
用于感应电机设计的分布磁路法快速迭代方法*
管少华1,程思为1,王东1,吴新振2
(1. 海军工程大学 舰船综合电力技术国防科技重点实验室,湖北 武汉430033;2. 青岛大学 电气工程系,山东 青岛266071)
摘要:针对非正弦供电十五相感应电机磁路计算的分布磁路法,对气隙磁密进行修正的迭代过程,提出采用牛顿拉夫逊迭代方法。通过MATLAB软件对两种算法的试验结果进行对比分析,可知该方法具有通用性强,收敛、运算速度快,受电机饱和程度影响小等优势,并改善了气隙磁密修正时依赖经验系数的不足。该方法特别适用于多相感应电机的优化设计。
关键词:多相感应电机; 非正弦供电; 分布磁路法; 牛顿拉夫逊法
0引言
综合电力技术是舰船动力平台未来发展的主流趋势[1],非正弦供电的多相感应电机已作为大型舰船电力推进的首选电机,成为国内外研究的重点之一。非正弦供电多相感应电机设计的一个发展趋势是采用基于种群的多目标电机优化设计方法[2-3],因此,需要快速准确的性能计算方法来评估海量的设计。性能计算方法的核心是电机的主磁路计算。现有的主磁路计算方法主要有以下几种。
(1) 解析磁路计算法[4]。该算法是一种传统且应用广泛的感应电机设计方法。在三相感应电机设计中容易计算最大气隙磁密。该方法依赖经验系数去修正磁路饱和度的影响和计算轭部磁密,且修正系数受很多因素的影响,比如齿部饱和程度和轭部尺寸形状。虽然已经提出磁路计算的推广方法,但是这些计算方法都是假设电机为正弦供电情况,故对非正弦供电的多相感应电机设计并不适用。
(2) 有限元法[5]。该算法是一种以变分原理为基础的数值计算方法,将一个复杂连续介质的求解区域分解为有限个简单形状的子区域,作为原区域的等效区域,从而将连续体的场变化量简化为有限个单元点上的场变量值。该方法把空间磁场分布用一个接近真实的磁场分布来代替,在设计的精细验证时应用很广泛。但是有限元分析法的计算时间过长,不适用于电机优化阶段中评估海量设计的需要[6]。
(3) 磁网格法[7]。该方法是一种可以考虑铁心饱和影响的方法,将电机划分为大量的磁势节点网格,在二维的感应电机分析中有一定应用。但是磁网格法的精度取决于磁网格的定义方式,很大程度上依赖于设计者的经验,通用性与一般性较差。
为解决之前提到方法的不足,海军工程大学于2009年提出了非正弦供电十五相感应电机磁路计算的分布磁路法[8]。分布磁路法从基波和3次谐波合成磁势出发,以等间隔周向分块为处理关键,通过对气隙磁密进行迭代计算得到沿圆周各节点气隙磁密。该方法是处理磁路非线性的有效措施,被广泛地应用于非正弦供电的多相感应电机设计,并得到了大量的实际工程验证。但该方法中对气隙磁密进行修正的迭代式是基于物理原理设计的,收敛速度与收敛性与被设计电机的饱和程度有关,迭代初值与迭代步长一定程度上依赖于经验系数。
本文提出用牛顿拉夫逊迭代法对气隙磁密进行修正,从数学角度保证了电机在不同饱和程度时均能可靠收敛,改善了气隙磁密修正时依赖经验系数的不足,且在收敛速度和收敛次数上都得到了提升。
1分布磁路法简要回顾
分布磁路法计算在1/4周期、即半个极距区域内进行。非正弦供电的十五相感应电机电动机磁势实际上可以只考虑基波电流产生基波磁势和3次谐波电流产生3次谐波磁势。基波电流和3次谐波电流磁势都为同步速。在感应电机半个极距模型中,用通过圆心的射线沿周向作等角度均匀分块处理,如图1所示。若沿周向均匀分为N块,则得到第i节点磁势为
(1)

图1 求解模型的周向分块
上述第i节点磁势实际为图1中粗实线所示闭合回路的磁势。
在各节点磁势已知的情况下,开始时可认为气隙中各节点磁密波形与磁势波形相似。由此得到i节点处气隙磁密Bg(i)为
(2)
式中:μ0——空气磁导率;
ge——考虑齿槽效应后的等效气隙长度;
kst——预取饱和系数,为经验系数,一般取1与1.5之间某一常数。
根据磁通连续性原理,第i节点处定、转子齿部磁密Bt1(i)、Bt2(i)分别为
(3)
(4)
式中:l——电机磁路轴向有效长度;
τt1、τt2——气隙中心处的定、转子齿距;
lfe1、lfe2——考虑叠压系数及径向通风沟后定、转子铁心轴向长度;
bt1、bt2——所计算处的定、转子齿宽。
同样根据磁通连续性原理可知,第1节点与第i节点间气隙中心面上的径向磁通等于第i节点处轭部截面上的周向磁通。用梯形公式的第i节点处定、转子轭部磁密分别为
(5)
(6)
式中:lfe1、lfe2——气隙中心处的电机极距;
hc1、hc2——定、转子轭高。
图1中粗实线所示的闭合回路认为是经过第i节点处的磁回路。因此经过第i节点的闭合回路总磁压降算式为
F∑(i)=Fg(i)+Ft1(i)+Ft2(i)+
Fc1(i)+Fc2(i)
(7)
式中5部分磁压降表达式分别为
(8)
Ft1(i)=Ht1(i)ht1
(9)
Ft2(i)=Ht2(i)ht2
(10)
(11)
(12)
式中:Fg(i)——第i节点处气隙磁压降;
Ft1(i)——第i节点处定子齿部磁压降;
ht1、ht2——定、转子齿高;
Ft2(i)——第i节点处转子齿部磁压降;为Fc1(i)第i至N+1节点间定子轭部磁压降;为Fc2(i)第i至N+1节点间转子轭部磁压降;
lc1、lc2——定、转子一个极下轭部长度。
对气隙磁密修正时采用的方法,是气隙磁密不满足给定精度的情况下,重新给出各节点气隙磁密,其中第i(i≠N+1)节点新气隙磁密为
(13)
式中:kB——经验系数,可在0.05~0.5间取值,饱和程度低时取大值,饱和程度高时取小值。
由上述可知,在分布磁路法中对气隙磁密初值确定时引入了预取饱和系数kst,此系数对计算的收敛性和收敛速度均有一定影响,其取值具有一定的经验性。
式(13)是从物理层面上设计的气隙磁密的修正式,难以推导其准确的数学收敛边界。对于不同的电机饱和情况,磁密迭代式中同样有一个经验系数kB对收敛性和收敛速度有一定影响,且其取值也带有一定的经验性。
本文提出的牛顿拉夫逊迭代法的几何意义是用曲线上一系列的切线与轴的交点来逐步逼近曲线与轴交点,经验证该法较好地解决了上述问题。
2牛顿拉夫逊迭代法
牛顿拉夫逊法是求解非线性方程组常用的方法,解非线性方程的牛顿拉夫逊法是一种将非线性函数线性化的方法。其标准模式如下:
设有非线性方程组
(14)
其近似解为x1(0),x2(0)…,xn(0)。设近似解与精确解相差Δx1,Δx2,…,Δxn。则下列关系式成立
(15)
式(15)中任何一式都可按照泰勒级数展开。略去高次方可得
(16)

由此可改写为如下的矩阵方程
(17)

可简写为
Δf=JΔx
(18)
式中:Δf——不平衡量的列向量;
J——函数的雅克比矩阵;
Δx——由Δxi组成的列向量。
将xi(0)代入,可得Δf、J中的各元素。运用解线性代数方程的方法,可求得Δxi(0),从而求得经第1次迭代后xi的新值xi(1)=xi(0)+Δxi(0)。再将求得的xi(1)代入,又可求得Δf、J中各元素的新值,从而解得Δxi(1)以及xi(2)=xi(1)+Δxi(1)。如此循环,最后可获得足够精确的解。
3迭代公式推导
对分布磁路法中应用牛顿拉夫逊法对气隙磁密进行修正,由安培环路定律可知,闭合磁路中总磁压降等于磁势,即式(1)与式(7)相等。若每个节点对应一个闭合回路,对所有的闭合磁路而言,总磁压降均要等于磁势。因此通过上两式对气隙磁密迭代过程构造方程组:
F(i)-F∑(i)=JΔBg
(19)
磁势F(i)与总磁压降F∑(i)之差相当于式(18)中的不平衡量Δf。式(7)中总磁压降F∑(i)由5部分组成,各磁压降为第i节点磁场强度的函数,而第i节点磁场强度是第i节点磁密通过查铁心磁化曲线相应得到的。因此式(19)中ΔBg为各节点气隙磁密ΔBg(i)组成的列向量,雅克比矩阵J可由总磁压降按式(17)中方法对各节点气隙磁密求导得到。
因为第i节点处气隙磁势、定子齿部磁势以及转子齿部磁势只与第i节点处气隙磁密有关,所以此3部分对气隙磁密求导得
(20)

(21)

(22)
式中: l——电机磁路轴向有效长度;
τt1、τt2——气隙中心处的定、转子齿距;
lfe1、lfe2——考虑叠压系数及径向通风沟后定、转子铁心轴向长度;
bt1、bt2——所计算处的定、转子齿宽;
ht1、ht2——定、转子齿高。
因为第i节点处定子轭部和转子轭部磁势与第i节点至第N+1节点有关,所以此两部分对气隙磁密求导得
(23)
式(23)为定子轭部磁势对气隙磁密求导结果,转子轭部磁势表达式与定子轭部相同。
将5部分磁压降对气隙磁密求导结果相加即构成雅克比矩阵J。
将Bg(i)(0)代入,运用解线性代数的方法,可求得ΔBg(i)(0),从而求得第1次迭代之后Bg(i)的新值Bg(i)(1)=Bg(i)(0)+ΔBg(i)(0)。再将求得的Bg(i)(1)代入,可求得Δf、J中元素的新值,从而求得ΔBg(i)(1)以及Bg(i)(2)=Bg(i)(1)+ΔBg(i)(1)。如此循环,最后可得到足够精确的气隙磁密Bg(i)。
4两种算法试验结果比较
提高电机端电压即为使电机的饱和程度增加。图2选取了3个不同电压等级下对应的定子齿部饱和程度,来比较不同饱和度情况下两种算法的收敛速度,分为A、B、C三种情况。

图2 不同饱和程度对比点
表1和表2给出了两种算法在图2的A点坐标下,不同精度和不同节点数下评估一千个设计的性能所需时间对比。可看出,电机在饱和程度较轻时,牛顿拉夫逊法与原先算法的收敛性和收敛速度都较好。

表1 A点: 牛拉法评估一千个设计的程序运行时间 s

表2 A点: 原算法评估一千个设计的程序运行时间 s
表3和表4给出了提高电机饱和程度至B点后,两种算法在不同精度和不同节点数下的程序运行时间对比。提高电机饱和程度之后原先算法程序运行时间明显增多,特别是在精度要求较高时,原先程序运行时间增多更加明显;而牛顿拉夫逊迭代法的运行时间受饱和程度的影响较小,主要是因为牛拉法本身就是一种变步长方法。
总体而言饱和程度高时两种方法虽然都收敛,但牛顿拉夫逊法收敛速度较快。

表3 B点: 牛拉法评估一千个设计的程序运行时间 s

表4 B点: 原算法评估一千个设计程序运行时间 s
在提高电机饱和程度至C点时,程序运行时间如表5和表6所示。原先的方法出现不收敛的现象,而牛顿拉夫逊法依然收敛。
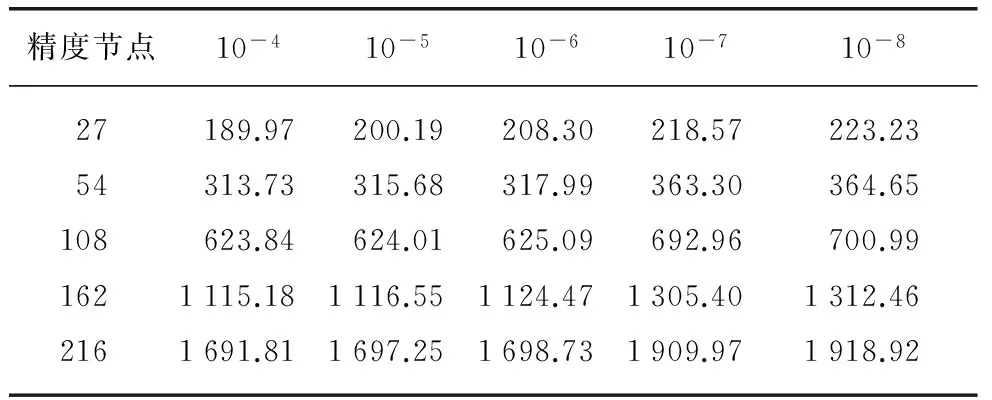
表5 C点: 牛拉法评估一千个设计的程序运行时间 s

表6 C点: 原算法评估一千个设计的程序运行时间
注: 其中∞代表不收敛。
电机在不同饱和程度下,当节点个数和精度要求相同时,由表5、表3以及表1对比可知,牛顿拉夫逊法程序运行时间增加并不明显,算法依然收敛。由表6、表4以及表2对比可知,原先程序运行时间增加比较明显,且出现了不收敛的情况。总体而言,牛顿拉夫逊法受饱和程度影响小,运算速度更快,收敛性更好。
原算法迭代公式需要提前确定迭代初值与迭代步长等系数。这些系数的确定带有一定的经验性且需要一定的试算,确定系数本身就需要一定的时间。因此,在使用的方便性和算法的自动化程度方面牛顿拉夫逊法有一定的优势。
下面给出电机在B点饱和程度下,两种方法在不同节点个数和精度要求时达到收敛程序时迭代次数。由表7和表8明显可看出,牛顿拉夫逊法迭代次数比原先方法迭代次数少,相同节点数下,在精度要求提高时,牛顿拉夫逊法迭代次数变化不明显,而原先算法迭代次数增多比较明显,而节点数的变化对迭代次数影响并不明显。
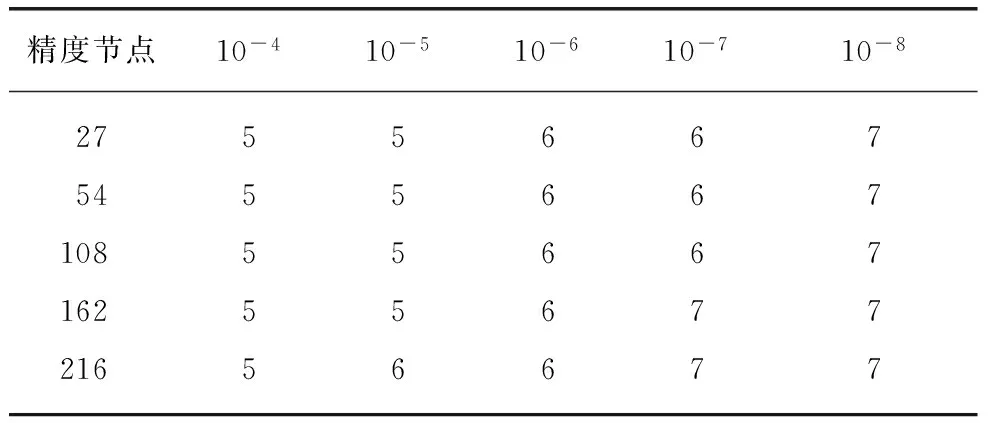
表7 B点: 牛拉法程序迭代次数

表8 B点: 原算法程序迭代次数
最后选取精度要求为10-5,节点个数为27时,在不同饱和度下,两种算法运行时间如图3所示。由图3可看出,牛顿拉夫逊算法运行时间短,受饱和程度影响小,原先算法在最大磁密为1.739T临界点之后出现了不收敛现象,牛顿拉夫逊方法依然收敛,运行时间也比原先算法短。
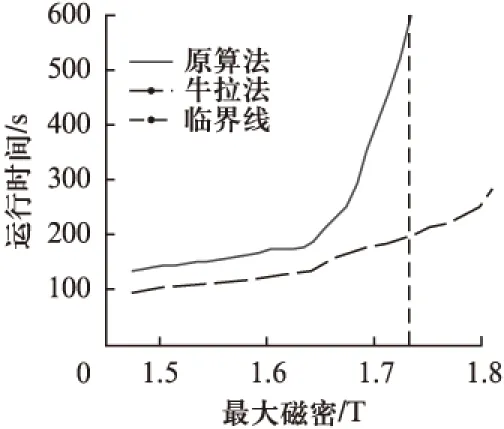
图3 两种算法不同饱和程度下运行时间
5结语
本文针对多相感应电机磁路计算的分布磁路法,提出了一种基于牛顿拉夫逊法的气隙磁密迭代方法。基于牛拉法设计的迭代式不依赖任何经验参数,具有通用性强,保证收敛、运算速度快,受电机饱和程度影响小等优势,特别适用于多相感应电机的优化设计。
【参 考 文 献】
[1]王东,吴新振,程思为,等.非正弦供电多相感应电机稳态性能分析[J].中国科学(技术科学),2015,45(3): 322-329.
[2]张羽.粒子群算法在电机优化设计中的应用[D].哈尔滨: 哈尔滨理工大学,2012.
[3]程福秀,林金铭.现代电机设计[M].北京: 机械工业出版社,1993.
[4]PYRHÖNEN J, JOKINEN T, HRABOVCOVV. Design of rotating electrical machines [M]. Hoboken, NJ, USA: Wiley, 2008.
[5]YAO W, JIN JM, KREIN P T. A highly efficient domain decomposition method applied to 3-D finite-element analysis of electromechanical and electric machine problems [J]. IEEE Trans Energy Convers, 2012,27(4): 1078-1086.
[6]WANG D, WU XZ, CHEN JQ, et al. A distributed magnetic circuit a distributed magnetic circuit approach to analysis of multiphase induction machines with non-sinusoidal supply[J]. IEEE Transactions on Energy Conversion, 2015,30(2): 522-532.
[7]QIN R, RAHMAN M A. Magnetic equivalent circuit of PM hysteresis synchronous motor [J]. IEEE Trans Magn, 2003,39(5): 2998-3000.
[8]王东,吴新振,马伟明,等.非正弦供电十五相感应电机磁路计算方法[J].中国电机工程学报,2009,29(12): 58-64.
*基金项目:国家自然科学基金资助项目(51507181)
作者简介:管少华(1991—),男,硕士,研究方向为永磁电机设计。 程思为(1985—),男,博士,助理研究员,研究方向为新型电机系统的设计、控制和状态监测。
中图分类号:TM 346
文献标志码:A
文章编号:1673-6540(2016)06- 0017- 06
收稿日期:2015-11-13
A Fast Iterative Method of Distributed Magnetic Circuit Approach of Induction Machine Design*
GUANShaohua1,CHENGSiwei1,WANGDong1,WUXinzhen2
(1. National Key Laboratory of Science and Technology on Vessel Integrated Power System,Naval University. of Engineering, Wuhan 430033, China; 2. Electrical Eng. Department,Qingdao University, Qingdao 266071, China)
Abstract:For the distributed magnetic circuit approach to fifteen-phase induction machine with non-sinusoidal supply, in the process of air-gap magnetic flux iterative calculation, the Newton-Raphson method was presented. It had the advantages of good and fast convergence, lesser affected by saturation degree et al. The human factors was eliminated by used this method and this method could satisfy the designing requirement.
Key words:fifteen-phase induction machine; voltage supply with non-sinusoidal; distributed magnetic circuit approach; newton-raphson method