基于滑模观测器的永磁容错电机转子位置估计算法研究*
2016-08-04孙军浩朱景伟白洪芬周博文曹科峰
孙军浩, 朱景伟, 白洪芬, 周博文, 曹科峰
(大连海事大学 轮机工程学院,辽宁 大连 116026)
基于滑模观测器的永磁容错电机转子位置估计算法研究*
孙军浩,朱景伟,白洪芬,周博文,曹科峰
(大连海事大学 轮机工程学院,辽宁 大连116026)
摘要:根据三相永磁容错电机的基本结构和数学模型,详细论述了基于滑模观测器的转子位置和转速估计算法。根据电流的观测值与实际值的差值构造滑模面函数,结合模型参考自适应算法确定滑模面的切换增益,按照李雅普诺夫稳定性原则较为准确地估算出电机在无位置传感器情况下的转子位置和转速信息。最后,通过MATLAB/Simulink分别搭建基于SVPWM和电流滞环控制的仿真模型,验证该转子位置估计算法的正确性和可行性,且能保持在要求的误差范围内。
关键词:永磁容错电机; 滑模观测器; 无传感器控制; 空间矢量脉宽调制; 电流滞环控制
0引言
永磁容错电机(Fault-tolerant Permanent Magnet Motor, FTPMM)是开关磁阻电机(Switched Reluctance Motor, SRM)和永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)相结合的产物,具有可靠性高、制造成本低、空间利用率高和容错性能好等优点,因此永磁容错电机在对推进系统可靠性要求较高的航空航天、船舶运输、电动汽车及医学等领域具有十分广阔的应用前景。为了获得转子位置或转速信号实现对电机的控制,传统的电机控制系统一般采用位置传感器直接检测,不仅增加了电机的体积和制造成本,也要求在电机与控制电路间增加额外的电气连接;同时受周边环境的温度、湿度和电磁噪声等的影响,传感器的灵敏度和控制精度会下降。因此,无位置传感器控制技术在电机控制中具有较强的实际意义。
目前,对于传统的FTPMM,已相继出现了直接计算法、反电动势积分法、扩展卡尔曼滤波法(Extended Kalman Filter, EKF)、模型参考自适应法(MARS)、滑模观测器法和高频注入法等多种解决方案进行位置估计,但这些技术并不能直接运用到具有绕组隔离特性的容错电机上。文献提出了适用于FTPMM的直接计算法,但该方法只适用于电机高速运行的场合,且估计结果受电机参数变化的影响较大。文献采用磁链增量法对具有冗余特性的FTPMM的转子位置进行估计,并用锁相环技术补偿估计误差,但该算法没有在电机实际控制中得到验证。文献采用观测器法估计五相BLDC容错电机的转子位置,并考虑一相开路的情况,但在故障情况下位置估计误差较大,且没有考虑其他故障的情况。文献提出通过检测相电流和反电动势过零点的方法检测高速FTPMM的转子位置,但一个周期内只能估计出2个转子位置信息,对电机进行高性能控制的场合不适用。文献利用反电势法估计双余度FTPMM的转子位置信息,但是由于低速时反电动势值很小,所以该方法在低速时误差较大。
跟上述方法相比,滑模观测器(SMO)法降低了电机参数变化及外界扰动对转子位置估算精度的影响,且响应速度快、鲁棒性强。由于在滑模面附近频繁的开关切换动作,滑模观测器存在一定的抖震现象。为减小抖振问题对估计精度的影响,文献采用饱和函数代替控制律中的切换函数解决抖振问题;文献[10]在滑膜观测器中结合参考自适应观测器的算法,改善了抖振并提高了系统的鲁棒性。但这些算法没有在FTPMM中应用。
本文在传统滑模观测器法的基础上,提出了一种适用于FTPMM的改进滑模观测器转子位置估计算法,根据观测的电流与实际电流值之间的差值构造滑模观测器方程,采用连续的Sigmoid函数消除低通滤波器和反正切函数的影响,并采用模型参考自适应法确定滑模面的切换增益,从而较为准确地估算出电机的转子位置和转速信息,并通过MATLAB/Simulink进行仿真验证。
1FTPMM结构及数学模型
三相四极FTPMM的结构如图1所示。电机转子采用表贴式转子磁钢结构,定子绕组采用单层集中绕组、并结合H桥驱动电路实现电机相与相之间的物理隔离、热隔离、磁隔离和电气隔离。为了抑制短路电流,采用深而窄的特殊槽口设计增加定子绕组的电感。

图1 三相四极FTPMM结构图
三相FTPMM在α、β坐标系下的数学模型为:
(1)
式中:uα、uβ——定子绕组在α、β轴上的电压分量;
iα、iβ——定子绕组在α、β轴上的电流分量;
eα、eβ——两套定子绕组在α、β轴上的反电动势分量;
R——绕组电阻;
L——绕组电感且d、q轴电感值相等。
在α、β坐标系下,FTPMM的定子磁链方程为:
(2)
式中:ωm——转子机械角速度;
ψf——永磁体产生的磁链幅值;
θ——转子磁极位置。
结合式(1)和式(2),得反电动势分量可表示为:
(3)
2基于滑模观测器的FTPMM控制系统
FTPMM无位置传感器控制系统结构如图2所示。在该模型中,根据转速和转子位置估计算法获得转子位置和转速信息,从而构成转速闭环控制系统。图2(a)为基于电流滞环控制的矢量控制策略,通过改变定子电流大小可以直接控制电机的输出转矩,从而可以达到控制电机转速的目的,比较简单;图2(b)采用SVPWM矢量控制策略,根据逆变器不同工作模式下产生的实际磁链矢量来追踪基准磁链圆,产生互差120°电角度的三相正弦电压,从而实现对电机的控制。

图2 FTPMM无位置传感器控制系统结构框图
3基于滑模观测器的FTPMM转子位置估计算法
滑模观测器是通过选择适当的滑模面函数来变换工作结构形式并保持该运动状态的非线性控制系统。该控制方法响应速度快、鲁棒性强[11]。
3.1滑模观测器转子位置估计算法
根据滑模变结构控制方法的基本原理可得滑模观测器的数学模型为:
(4)
式中:x∈Rn;A、B∈Rn*m;u、u0∈Rm;s=s(x)为滑模函数,且滑模面函数满足s(x)=0。根据需要,选择电流的观测值与实际测量值的差值为开关面:
(5)
在传统滑模观测器的基础上,为了提高转子位置估算的精确度、增大滑模观测器算法的转速适应范围,一方面可以引入模型参考自适应法不断更新滑模增益系数,另一方面可以增加滑模加权相,保证在电流误差较大时系统可以快速达到滑模面。在此基础上,设计滑模观测器方程为
(6)



ε——滑模加权项系数。
式(1)与式(6)作差,可得电流误差方程为
(7)
为了使滑模变结构渐进稳定,式(7)需要满足稳定性条件,则构造Lyapunov函数为:
(8)

(9)

(10)
从而可得,滑模观测器估计的电机转速和转子位置信息分别为:
(11)

ωc1——低通滤波器截止频率。
此处采用低通滤波器可将输出的反电动势观测值中的不连续开关信号转变为连续信号。
低通滤波器的引入会使估计的电机转子位置信息有相位滞后,增加补偿量对相位进行滞后补偿,为:
(12)
3.2消除系统抖振
由于滑模面开关的离散性,滑模观测器的抖振现象会一直存在,传统滑模观测器控制算法采用开关函数,开关时间和空间滞后使抖振现象严重,因此需要采取一定措施减小抖振[13]。本文采用连续的Sigmoid函数取代传统的开关函数,即:
(13)
式中:τΔ——边界常数,通过调节它既可以保证系统的鲁棒性,也可以达到抑制抖振的最佳效果[14]。
则此时,式(6)可改写为
(14)
图3为FTPMM估计转速与转子位置的滑模观测器的基本原理图。
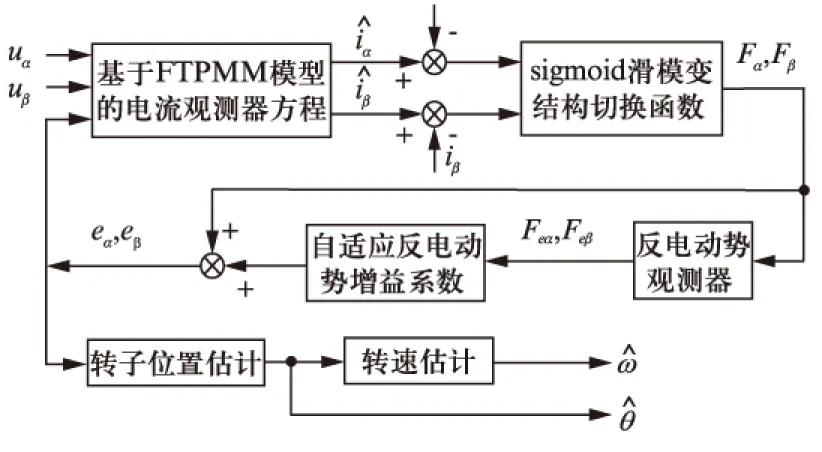
图3 基于滑模观测器的FTPMM转子位置和转速估计算法结构框图
4仿真结果分析
为了验证本文提出的改进型滑模观测器控制方法的可行性及该位置估计算法在SVPWM和电流滞环两种矢量控制中的不同,在MATLAB/Simulink中搭建仿真模型对三相FTPMM的矢量控制系统进行仿真研究。控制过程中分别采用SVPWM和电流滞环控制方法,仿真时间均为0.3s。电机起动时给定负载转矩2.3N·m,初始给定转速为500r/min,0.1s时电机转速突变为1000r/min,0.2s时转矩突变为5N·m。
4.1基于SVPWM的系统仿真结果与分析
图4~图6为基于SVPWM的无位置传感器控制的仿真波形。从图4~图6的波形中可以看出,电机大约经过0.015s达到稳定运行状态,具有良好的启动性能,且转速和转子位置估计值较为精确,误差基本保持在0附近。0.1s时电机转速突增到1000r/min,电流、转矩和转速出现了较大的脉动,此时估计的转速存在较大误差,与实测值差值最大达到55r/min,估计的转子位置也出现了较大波动,大约经过0.01s电机重新恢复到稳定状态。0.2s时转矩增加到5N·m,同样地,电流、转矩和转速均出现较大波动,大约经过0.007s重新恢复到稳定状态。

图4 基于SVPWM的仿真波形

图5 基于SVPWM的转速波形

图6 基于SVPWM的转子位置波形
通过上述仿真波形可知,改进型滑模观测器的转速和转子位置估计算法,在三相永磁容错电机中是适用的,在出现转速、转矩突变后,电机能够快速恢复到稳定状态,且转速和转子位置估计值较准确。
4.2基于电流滞环(CHBPWM)控制的系统仿真结果与分析
图7~图9为基于电流滞环控制的无位置传感器控制的仿真波形。从图7~图9的波形中可以看出,电机采用电流滞环控制时,大约经过0.012s达到稳定运行状态,稳定运行时转速和转子位置估计值较为精确,误差基本保持在0附近。0.1s时电机转速突增到1000r/min,电流、转矩、转速和转子位置均出现较大的脉动,此时估计的转速与实测值的差值最大达到80r/min,估计的转子位置也出现了较大波动,与实测值相差0.1rad左右,大约经过0.008s电机重新恢复到稳定状态。0.2s时转矩增加到5N·m,电流、转矩、转速和转子位置出现较大波动,大约经过0.005s重新恢复到稳定状态。

图7 基于CHBPWM的仿真波形
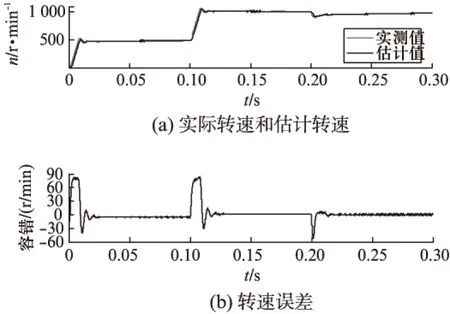
图8 基于CHBPWM的转速波形

图9 基于CHBPWM的转子位置波形
由上述波形可知,基于电流滞环控制的改进型滑模观测器转子位置估计算法是可行的。在出现转速、转矩突变时,电机能够快速恢复到稳定状态,且转速和转子位置估计值较准确。
通过图4~图9的波形可以看出,SVPWM控制策略的转矩和转速脉动较小,但控制相对较复杂,而电流滞环控制降低了计算的复杂程度,转速相应速度较快。在对响应速度和控制精度要求不同的场合选用合适的矢量控制策略。
5结语
本文在分析三相FTPMM结构和数学模型的基础上,讨论了适用于容错电机的改进型滑模观测器无传感器控制策略,并分别采用电流滞环和SVPWM两种矢量控制策略,通过改进开关面函数和增加自适应增益,减小系统抖振,增加转速适应范围。最后通过仿真波形验证基于两种不同矢量控制策略的滑模无位置传感器控制的正确性和适用范围,在对响应速度要求较高的场合应该优先考虑CHBPWM,而对于转矩和转速精度要求较高的场合则需要考虑采用SVPWM控制。
在FTPMM控制系统中采用无位置传感器控制技术,可以降低系统的复杂程度和成本。此外,在安装转子位置传感器的FTPMM控制系统中,估计的转子位置信息可以作为传感器测量的位置信息的冗余,当位置传感器发生故障时,切换到无位置传感器控制策略中,这样可以进一步提高整个系统的可靠性。
【参 考 文 献】
[1]REN J J, LIU Y C, WANG N, et al. Sensorless control of ship propulsion interior permanent magnet synchronous motor based on a new sliding mode observer.ISA Transactions,2014,7(2): 15-26.
[2]GREEN S, ATKINSON D J, JACK A G, et al. Sensorless operation of a fault tolerant PM drive. IEE Proceedings on Electric Power Applications,2003,150(2): 117-125.
[3]AN J S, ERTUGRUL N, SOONG W L, et al. An indirect rotor position estimation technique for a fault-tolerant brushless PM motor drive//Power Electronics Specialists Conference, Rhodes, Greece,2008: 1553-1558.
[4]O CARLO. A fault-adaptive and observer-based sensorless strategy for a fault-tolerant five-phase BLDC motor//Proceedings of 2013 IEEE International Symposium on Sensorless Control for Electrical Drives and Predictive Control of Electrical Drives and Power Electronics, Germany,2013: 10.
[5]WOLMARANS J J, POLINDER H, FERRERIA J A, et al. Modular sensorless control of high speed fault tolerant machines//Proceedings of 2010 International Power Electronics Conference ECCE Asia, Japan,2010: 2533-2539.
[6]曹科峰,朱景伟,岳路.永磁容错电机转子位置估计算法研究.微电机,2015,48(1): 54-58.
[7]HAN Y S, CHOI J S, KIM Y S, Sensorless PMSM drive with a sliding mode control based adaptive speed and stator resistance estimator. IEEE Transactions on Magnetics,2000,36(5): 3588-3591.
[8]白洪芬,朱景伟,秦俊峰.改进滑模观测器在船舶电力推进PMSM无位置控制中的应用.中国航海,2015,38(4): 22-25.
[9]KIM H, SON J, LEE J. A high speed sliding mode observer for the sensorless speed control of a PMSM.IEEE Transactions on Industrial Electronics,2011,58(9): 4069-4077.
[10]滕青芳,柏建勇,朱建国,等.基于滑模模型参考自适应观测器的无速度传感器三相永磁同步电机模型预测转矩控制.控制理论与应用,2015,32(2): 150-161.
[11]崔晨,雷晓犇.基于滑模变结构的容错电机磁势补偿控制.微计算机信息,2010(22): 207-208.
[12]FURUHASHI T. A position-and-velocity sensorless control for brushless DC motors using an adaptive sliding mode observer. IEEE Transactions on Industrial Electronics.1992,39(2): 89-95.
[13]樊英,张丽,程明.基于宽速滑模观测器的新型自减速永磁轮毂电机无传感器直接转矩控制.电工技术学报,2014,29(5): 141-149.
[14]方一鸣,于晓,牛犇,等.永磁同步电机的自适应模糊终端滑模速度控制.中南大学学报(自然科学版),2013,44(12): 4855-4860.
*基金项目:国家自然科学基金项目(51077007);辽宁省科学技术计划项目(2011224004)
作者简介:孙军浩(1990—),男,硕士研究生,研究方向为永磁电机无速度传感器矢量控制。 朱景伟(1963—),男,教授,博士生导师,研究方向为永磁容错电机及控制、新能源变换技术。
中图分类号:TM 351
文献标志码:A
文章编号:1673-6540(2016)06- 0001- 06
收稿日期:2015-11-23
Estimation Algorithm Study of Rotor Position for a Fault-Tolerant Permanent Magnet Motor Drive Based on Sliding Mode Observer*
SUNJunhao,ZHUJingwei,BAIHongfen,ZHOUBowen,CAOKefeng
(Marine Engineering College, Dalian Maritime University, Dalian 116026, China)
Abstract:On the base of analyzing the structure and mathematical model of FTPMM,the basic equation of a new sliding mode observer(SMO) was constructed according to the differences between the observed current values and the actual current values. Combined with the model reference adaptive method to confirm the switch gain of the sliding surface, the rotor position and rotor speed are estimated correctly. Finally, the correctness of the proposed sliding mode observer algorithm both based on space vector pulse width modulation(SVPWM) and current hysteresis band pulse width Modulation(CHBPWM) control was verified in MATLAB/Simulink.
Key words:fault-tolerant permanent magnet motor (FTPMM); sliding mode observer (SMO); sensorless control; Space vector pulse width modulation(SVPWM); hysteretic current control