基于特征光源的三维室内定位技术
2016-08-04黄吉羊
黄吉羊,孟 濬,张 燃
(浙江大学 电气工程学院,浙江 杭州 310027)
基于特征光源的三维室内定位技术
黄吉羊,孟濬,张燃
(浙江大学 电气工程学院,浙江 杭州 310027)
摘要:针对当前室内定位技术精度低、局限大、缺乏高度信息和抗干扰性差等问题,以特征光源为固定单元,球形采光装置为移动单元,基于对光信号的角度测定建立模型实现三维室内定位.球面采光模式突破了传统平面采光对光源位置的限制,实现了360°全方位采光,能够获得包含高度在内的三维位置信息;基于光的粒子性的定位方式避免了由于光的波动性引起的伪光源干扰,阵列化布局和优化算法提高了定位精度.Matlab仿真结果、实物实验结果及精度分析证实,利用常规的LED光源、光纤和光传感器,该定位技术能够在3 m高的房间内达到0.03 m左右的定位精度,实现了低成本下的高精度三维室内定位.
关键词:三维室内定位;特征光源;球形采光装置
随着科学技术的进步,人们对实时、准确的位置信息的需求越来越大,定位技术在各行各业中有着越来越重要的应用.目前,对于户外环境,基于卫星导航系统的定位技术已相对成熟,在室外定位领域发挥了巨大的作用.在人们活动最频繁的室内环境中,室内定位技术作为定位技术的末端,发展相对缓慢.
当前的定位技术主要分为以下3种方式:基于卫星的定位、基于射频信号的定位和基于自包含传感器的定位[1].基于卫星的定位利用卫星导航系统这一能够获取高精度导航信息的空间基础设施,如美国GPS系统、俄罗斯GLONASS系统、中国北斗卫星定位系统等,能够在全球范围内实现有效的定位[2].卫星定位系统的精度通常在1m级甚至10m级,且跟踪卫星的信号会因为建筑物的遮挡而使精度大大降低[3],因此这一技术手段难以扩展到室内定位领域.室内环境在建筑物的布局、结构、装饰等方面往往更复杂,也使得室内定位相对室外定位而言面临着更多的技术难题.如今,室内定位技术备受关注,人们希望通过对室内定位技术的探索,实现在人类活动的地上、地下空间和外层空间范围内的无缝覆盖以及各种定位应用间的平滑过渡和无缝连接[4].近年来,国内外许多学者就室内定位开展了研究,也取得了一定的成果,但是当前的室内定位技术存在精度低、局限大、缺乏三维信息以及抗干扰性差这几个问题.
本文在介绍现有室内定位技术的基础上,提出基于特征光源的三维室内定位系统,详述该系统的原理和基于该系统的三维室内定位具体实施方法,并进行误差分析.在Matlab仿真的基础上,通过实物实验予以实现,证明该基于特征光源的三维室内定位系统和方法的可行性和研究前景.
1定位原理综述
定位系统通常由两部分组成:移动单元和固定单元.固定单元的位置是固定且已知的,相当于移动通信中的基站;移动单元通常被所需定位的人携带或安置在所需的物体上,一般具有对某种无线信号的发射和接收功能[5].移动单元通过和固定单元通信来确定它相对于固定单元的相对位置参数,如距离、角度等,从而得到它的实际位置坐标.
1.1位置变量
无论何种定位系统,获取位置信息都要首先获得相关的位置变量,再建立对应的数学物理模型来实现具体位置坐标的计算.在室内定位领域,当前常用的位置变量有以下4个.
1.1.1信号传播时间(timeofflight,ToF)即信号从发送到被接收所经历的时间,结合该信号在介质中的传播速度,可以求出固定单元和移动单元间的距离.1.1.2接收信号强度(receivedsignalstrength,RSS)即接收到的无线信号的强度,该强度通常会随着传播距离的增加而衰减,大量的实验数据得出移动单元接收到的无线信号强度与传播距离之间存在的数学模型.据此可以在一定范围内根据移动单元无线信号的强度较准确地求取其到固定单元的距离[6].
1.1.3信号抵达时间差(timedifferenceofarrival,TDoA)即在具备单一信号接收端、多个时间同步发射端和多种同步信号发射端的系统中,信号接收端对连续抵达的多个信号所记录下的时间差.根据TDoA可以推算出信号接收端各个信号发射端空间位置上的相对关系,从而进一步确定移动端的坐标.
1.1.4信号抵达角度(angleofarrival,AoA)来自固定单元的无线信号到达移动单元时,其轨迹相对于事先确定的某一方向的角度,据此结合几何知识可以实现移动单元相对于固定单元位置的计算.
1.2定位技术
不同的室内定位系统采取不同的无线信号实现对上述位置变量的测定,采用何种无线信号通常由定位系统所要求的定位精度、安全性、设备成本等确定.目前,常见的定位技术有以下几种.
1.2.1红外技术(IR)红外线作为在特定波长范围内的一种电磁波,很早就在工程测距领域被采用,也较早地被引入室内定位领域.红外室内定位系统的精度一般较低,同时由于红外线传输距离短且在传输过程中极易受物体阻拦,系统的功耗和复杂度面临很高的设计要求,因此实用性较低.
1.2.2超声波技术(Ultrasonic)超声波定位目前大多采用反射式测距法,精度可以达到cm级,但是由于要配备多种信号发射、接受设备,系统的成本相对较高.超声波在传输过程中衰减明显,定位范围受到很大的影响.
1.2.3射频识别技术(RFID)射频识别技术利用电感和电磁的耦合特性实现对被识别物体的自动识别,因为部署简单、成本低廉且有一定的精度和抗干扰性,被广泛应用于自动控制领域.基于射频识别的室内定位系统通常由电子标签、射频读写器、中间件及计算机数据库组成,所采取的射频(RF)根据波长不同,其范围从低频到微波不一.综合考虑系统性能和成本,通常采用基于2.45GHz微波频段的RFID室内定位系统,如微软所研发的基于RSSI的RADAR室内定位系统和TI/CHIPCON所开发的基于ZigBee技术的室内定位系统等[7],精度很高,但对数据采集的工作量和网络稳定性提出了较高的要求.
此外,有基于超宽带(UWB)、蓝牙(BlueTooth)、计算机视觉(CV)等各种其他无线信号的定位技术,此处不一一赘述.以上各类室内定位技术的性能对比如表1所示.
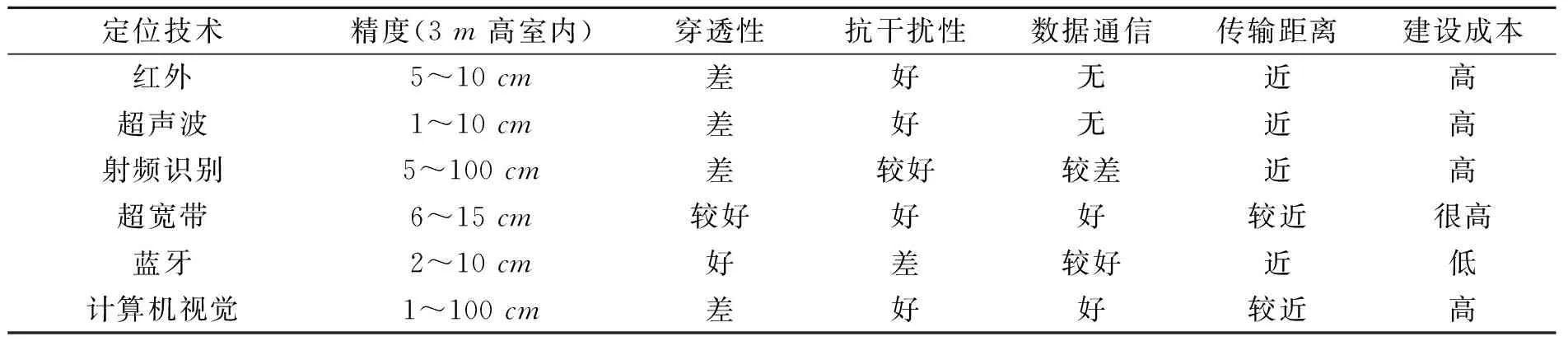
表1 各室内定位技术性能
2基于光信号的室内定位研究
光信号作为一种常见的通讯媒介,近年来被引入室内定位的研究中.Yoshino等[8]使用1 000×1 000像素的图像传感器作为光接收器,设计了一种定位方法,实验的定位误差约为1.5m;Rahman等[9-10]设计基于双图像传感器的VLC定位方法,通过2个600万像素的图像传感器接收至少3个LED发出的光,计算待定位点的三维坐标,在1.8m×1.8m×3.5m的实验空间内,误差可以控制在0.15m内[11].
本文提出基于特征光源的三维室内定位系统,以特征光源作为固定单元,球形采光装置为移动单元,通过对光这一无线信号的AoA测定实现三维室内定位.相对于现有的研究成果,本文提出的定位系统具有以下优点.
1)采用阵列化的曲面采光模式,突破了平面采光板对光源位置的限制,且能够得到目标的高度信息.
2)同时对光的频率和编码进行识别,而不是单一的颜色检测,提高测量精度.
3)基于光的入射角进行位置计算,而非基于图像传感器,在降低成本的同时简化了计算模型.
2.1系统构建
系统框图如图1所示.

图1 基于球形采光系统的三维室内定位系统结构图Fig.1 Schematic diagram of system structure
系统由特征光源、球形采光装置和处理器3个模块组成.其中,特征光源作为固定单元发出具有特征的光;球形采光装置作为移动单元放置在所需定位的位置或被所需定位的人携带,接收特征光源发出的光;处理器对球形采光装置采集到的光数据进行分析处理求取出球形采光装置所处的位置.下面对系统的3个组成部分作详细叙述.
特征光源的特征体现为光的频率和/或编码,以频率为特征的含义是特征光源发出的光的频率互不相同,如可见光的不同颜色;以编码为特征的含义是特征光源发出的光的编码互不相同,如光按照不同明暗间歇闪烁,这样的闪烁频率可能较高,因而人的肉眼无法识别,但是可以被具备光电信号转换和数据处理能力AO处理器所识别.为了保证后续计算,系统需要有至少3个具有不同特征的光源.
球形采光装置由球形支架、多根光纤和数据传输模块组成.多根光纤中的每一根光纤一端以垂直于球形支架表面的角度嵌入球形支架,交点称为采光点,另一端引至数据传输模块;采光点对光的入射角有所限制,用于采集特定角度入射的特征光源发出的光信号并通过光纤传输至数据传输模块,数据传输模块将采集到的光信号特征和采集到该光信号的采光点位置通过有线或无线方式传输给处理器.该处所布置的光纤数量越多,定位的精度越高.相对于现有的平面感光装置,设计的球形采光装置避免了采光的盲区、死角,可以感知各个方向的光源,实现了三维立体感光.
处理器记录各个特征光源的特征和在室内的位置,根据各个特征光源的特征和在室内的位置以及球形采光装置传递的各个采光点采集到的光的特征和采光点在球形采光装置上的位置,计算出球形采光装置所处的位置,从而实现三维室内定位.处理器既可以嵌在球形采光装置内部,也可以和球形采光装置分离并以有线或无线方式和球形采光装置实现数据传输.
2.2定位流程
该系统实现三维室内定位的过程如下.在室内需要定位的地点布置好球形采光装置,之后打开特征光源令球形采光装置采光,考虑到光纤对入射光角度的限制,可以认为只有接近径向入射的光才能被对应的光纤所采集到,即实现了对特定光的AoA采集.之后,处理器对球形采光装置上各个采光点接收到的光信号进行分析,基于各个特征光源的光的特征分离识别出该采光点接收到了哪几个特征光源所发出的光.针对每个采光点选取出采集到的最主要的特征光源,再根据这样的对应关系,选取3条不同特征光源所对应的3个不同的采光点,可以建立如图2所示的模型.
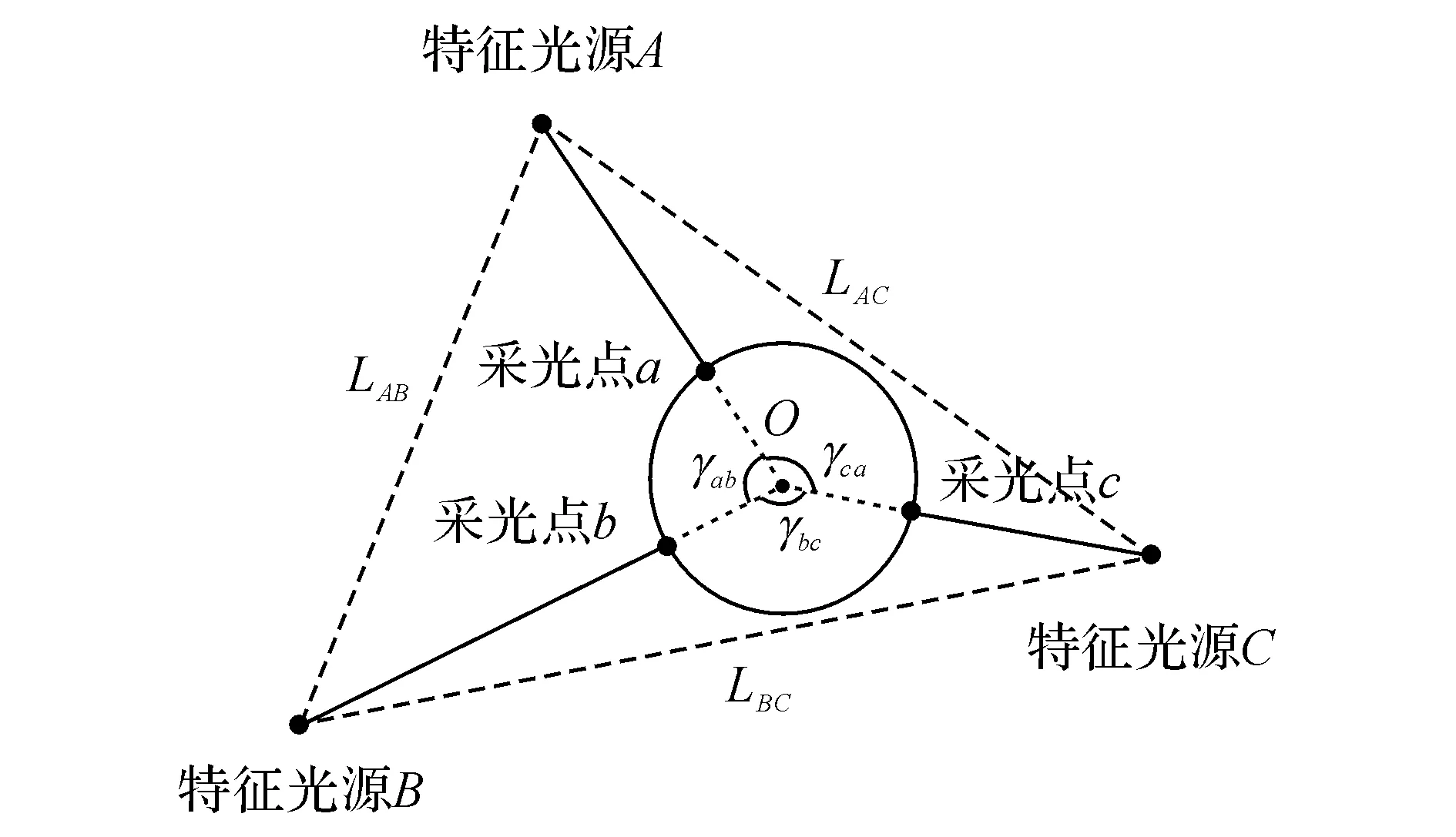
图2 位置计算原理图Fig.2 schematic diagram of position calculation
记3个光源的位置坐标分别为A(xA,yA,zA)、B(xB,yB,zB)、C(xC,yC,zC),球形接收装置根据采光点a、b、c的位置计算这三个点和球形采光装置球心O连线Oa、Ob、Oc间的夹角γab、γbc、γca,即为3个光源入射光之间的夹角,记采光点a、b、c的位置分别为a(r, θa, ψa)、b(r, θb, ψb)、c(r, θc, ψc),可得γab=arccos [cosθacosθbcos (ψb-ψa)+sinθasinθb],
γbc=arccos [cosθbcosθccos(ψc-ψb)+sinθbsinθc],
γca=arccos [cosθccosθacos(ψa-ψc)+sinθcsinθa].
在3个三角形中分别运用余弦定理,可得
AO2+BO2-AB2=2AOBOcosγab,
BO2+CO2-BC2=2BOCOcosγbc,
CO2+AO2-CA2=2COAOcosγca.
式中:



解方程组可以求得AO、BO、CO的数值.由于这是一个三元二次方程组,应解出8组解,显然复数根和非正实数根可以直接排除.剩余的解可能会相等,但更多时候是不同的,为了获取定位的唯一结果,可以运用以下几种方式.
1)另取3个特征光源(只要与这三个不完全一致即可)进行计算,类似地排除复数根和非正实数根.再与本次计算得出的解相匹配,根据数值的接近程度可以轻易筛选出唯一解.
2)将球形采光装置进行小幅度的位移,根据这3个特征光源进行计算,类似地排除复数根和非正实数根.与本次计算得出的解相匹配,结合本次位移量即可轻易筛选出唯一解.
3)将球形采光装置和陀螺仪或其他能够获取重垂线方向或水平面方向的装置相结合,引入一个额外的方向参数,在计算中即可排除另一组解.
在求出了AO、BO、CO的数值后,若O位于△ABC平面内,则解显然是唯一的,可得O点的坐标值;若O不位于△ABC平面内,则存在处于镜像位置的两组解,但是其中一组可以通过光线入射方向轻易排除,即可以得到O点的坐标值.于是,得到了球形采光装置所处的位置,实现了三维室内定位.
在实际应用中,可以通过多次选取不同的3条特征光源重复上述计算过程,对计算结果进行聚类以提高定位的精度.
3实验论证及优化分析
采用Matlab软件建立模型,仿真所提出的室内定位技术;设计实物实验,现实模拟定位情景;根据实验结果进行误差讨论和优化分析.
3.1Matlab仿真
采用MatlabR2012a软件进行编程仿真,仿真程序的流程如图3所示.

图3 Matlab仿真流程图Fig.3 Flow chart of Matlab simulation
初始化包括了球形采光装置位置和大小的设置、球面采光点密度的设置以及特征光源数量和位置的设置.为了计算方便起见,球形采光装置的球心位置设定在原点(0,0,0).球面采光点密度通过设置各个采光点到球心连线的最小夹角来实现,该角度为2π的正整数分之一,越小则球面采光点密度越高.光源数量≥4,位置在球面外随机生成.
在程序中,获取最优采光点的方式如下:在选取了3个特征光源之后,连接3个特征光源和球心,这3条连线和球面产生3个交点,再分别选取和这3个交点最接近的采光点作为计算使用的采光点,相关代码如下.
a=[sym(atan((y(1)/x(1))))sym(atan((y(2)/
x(2))))sym(atan((y(3)/x(3))))];
b=[sym(asin((y(1)/r(1))))sym(asin((y(2)/
x(2))))sym(asin((y(3)/x(3))))];
%计算理想采光点位置
a(isnan(a))=0;
b(isnan(b))=0;
%避免Z轴点影响
a=round(a./p).*p:
b=round(b./p).*p:
%获取实际采光点位置
式中:p为采光点到球心连线的最小夹角.仿真程序中各个参数、方程计算的方法参照2.2节的公式,此处不一一赘述.
在固定一组光源之后,在仿真实验中调整p的大小,可以看到球面采光点的分布密度对定位精度的影响,以图4所示的这组数据为例.
3个光源的位置分别为(8,0,6)、(5,12,0)、(4,6,8),球心位置为原点(0,0,0),定位结果随着p的变化如表2所示.
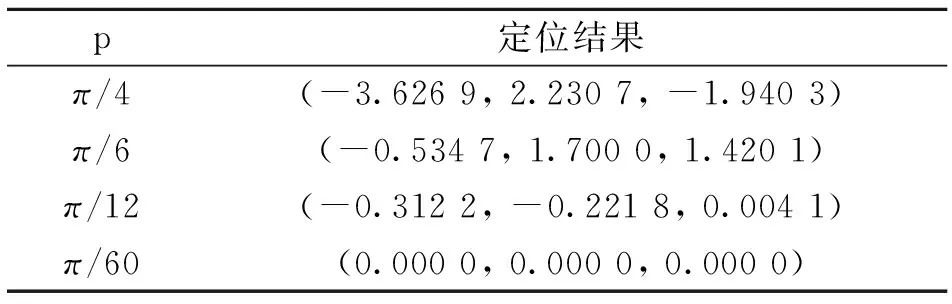
表2 采光点密度对定位效果的影响
实际的定位效果如图4所示.图中,A、B、C为3个光源的位置,O1~O4为不同p下的4个定位结果.
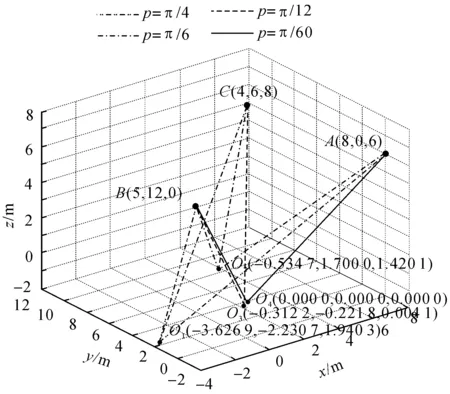
图4 不同采光点密度定位示意图Fig.4 Schematic diagram of different lighting point density
例如选取一个直径为10cm的球形采光装置,当p取15°时,球面的采光点间距约为2.62cm,这在制作工艺上不难实现.从仿真结果可以看出,这样的装置可以在10m级的空间范围内得到0.1m级的定位精度,这样的定位效果是非常优秀的.
3.2实物实验
由于时间、精力及实验条件的限制,实物实验仅在仿真得到理想结果的基础上进行原理性验证.
在实验器材的选取方面,LED光源具有廉价、绿色环保、高效率等优点,被广泛应用于各类照明系统中.目前,国外有许多基于LED光源和图像传感器的室内定位研究成果[12-13].在该实验中,以3个可编码的LED灯特征光源,通过设置频率控制发光编码.
为了简便起见,用半球采光装置取代球形采光装置,在光源均处于一个方向的时候效果是等同的.采用的半球采光装置由3D打印技术制成,分为半球和底座两个部分.这两个部分各自的3D绘制图如图5所示,3D打印实物图如图6所示.
图5 球形采光装置3D绘制图Fig.5 Three-dimensional sketch of spherical lighting device
图6 球形采光装置实物图Fig.6 Real photos of spherical lighting device
如图6(a)~(c)分别为半球的立体图、侧视图和俯视图,半球表面孔的直径与光纤直径相当,孔的方向为球的径向方向;如图6 (d)、(e)所示为底座图,底座的3个圆孔用于引出光纤末端.在实验中,布置了一组(3根)光纤,根据系统原理可知,3根光纤可以对应到空间的一个点.为了测量的方便,实验中的装置仅在二维平面内移动,即仅测量了水平面的误差.在3个互成60°夹角的径向孔径上插入了3根光纤,光纤头端从半球表面伸出,尾端从底座穿出.此处采用外径为2.2mm、内径为1.0mm的FT-310光纤.实验中使用的塑料盒尺寸为60cm×57cm,3个LED光源距离底部的高度为30cm.采用智能手机作为处理器,将球形采光装置尾端引出的光纤粘贴到手机摄像头上,通过手机摄像头来检测光纤接收到的光的情况,如图6(d)、(e)所示.
所搭建的整个实验装置系统如图7所示.
图7 基于特征光源的三维室内定位实物实验整体系统搭建图Fig.7 Real photos of whole system of the three-dimensional indoor positioning experiment based on characteristic light source
在完成实验装置的搭建之后,调整好接收装置的位置和角度,3个LED光源发出的光分别射入接收装置表面的光纤头端,光经过光纤传导被手机摄像头感知,形成一个亮斑,手机摄像头通过检测亮斑的闪动频率能够得知接收到的光由哪个光源发出,同时手机摄像头检测光斑中心点的光强变化;从前述的理论推导中可知,每组入射角度(即3根光纤之间的夹角)会对应空间的一个位置,所以当3个手机摄像头的光斑中心强度均达到最大值时,此时接收装置对应的位置是在该实验条件(光源位置和光纤在球体上的角度分布)下的精确位置;移动接收装置,若某个手机摄像头检测的光强低于阈值,则认为接收装置的位置已经离开了精确位置的有效范围(在球面光纤足够多的情况下,此时会有另一根光纤接收到光斑达到有效值,即已进入另一精确位置的有效范围).对所有采集到的数据进行归类处理,可得室内定位的结果.
实验结果如图8所示.图中,圆圈位置为精确位置,三角形区域为有效区域.从测量的数据可以看出,有效区域中最远的点离精确位置的距离大约为5.5cm,即这种情况下的最大误差.
球形采光装置较好地实现了对特征光源发出的光的筛选和传输,智能手机能够根据光的编码区分出光的来源,以此建模计算出的位置信息比较准确.可以推出,若将该方法运用于3m高的房间,定位精度将达到50cm左右,在如此低廉的装置成本下,这样的定位精度是相当可观的.

图8 基于特征光源的三维室内定位效果示意图Fig.8 Positioning results of three-dimensional indoor positioning experiment based on characteristic light source
3.3误差讨论和优化分析
该方法所引入的系统误差主要来自以下两方面.
1)光纤的AoA筛选效果限制.光纤对入射光纤的要求并非是完全径向的,光纤利用光的全反射原理来实现信号传输,要求入射光的入射角大于全反射临界角,而该临界角取决于光纤自身材料的光折射率[14].当前常见的多模光纤的全反射临界角不会达到90°,并且该数值越低,引入的系统误差越大.考虑到光纤的直径和光源到光纤口的距离,该误差会在很大程度上影响定位的精度.在构建系统时,必须详细考察所选用光纤的材料特征.
2)球形采光装置表面布置光纤数的限制.理论上,当球形采光装置发生移动时,如图9所示,由于每一组入射角度可以唯一确定一个球形采光装置球心的位置点,只要球形采光装置的光纤分布足够密集,轻微的移动即会生成一组新的入射角度,由此推论该三维室内定位方法是可以达到任意精度的.在球形采光装置的制作方面,应在成本和制作工艺允许的情况下尽可能密集地布置光纤,以提高定位精度.
图9 不同位置处的采光示意图Fig.9 Schematic diagram of lighting in different position
在仿真实验中,随着p的降低,定位的精度可以大幅度提高.在实际运用中,由于成本和制作工艺上的限制,布置过多较高精度的光纤布置不现实.针对上述两点系统误差,可以考虑在算法上进行优化,以选取出最适合进行定位计算的采光点和特征光源.与硬件上的改进相比,算法上的优化虽然一定程度上增加了处理器的运算量,但是大大降低了材料和制作方面的成本.
实际在制造球形采光装置时,考虑到采光的效率和范围,表面的光纤必然采用均匀分布的方式.在该情况下,为了保证球面上各个相邻的采光点间距离相同,只能将任意三个相邻的采光点布置为曲面正三角形,如图10所示.

图10 均匀布置光纤时的球面采光点示意图Fig.10 Schematic diagram of lighting points on sphere
在定位过程中,当球形采光装置有光纤采集到了来自某一个特征光源的光信号,则可知该特征光源发出的光在球形采光装置球面上的理论入射位置必然处于某3个相邻采光点所构成的曲面正三角形之间(含该三角形的边和角).考察这三个采光点所采集到来自该特征光源的光信号强度,可得该特征光源入射球面的准确位置,不必在球面这三个采光点间额外布置光纤.下面详述具体计算过程,为了方便起见,在计算过程中将曲面正三角形近似为平面正三角形.
1)针对某一个特征光源,选取球形采光装置表面上采集到来自该特征光源光信号的所有采光点,对这些采光点按照采集到的来自该特征光源的光信号强度从高到低排序.
2)根据排序结果分析该特征光源入射球面的准确位置和这些采光点位置间的关系,如图11所示.基于分析结果计算该准确位置,以供后续定位.
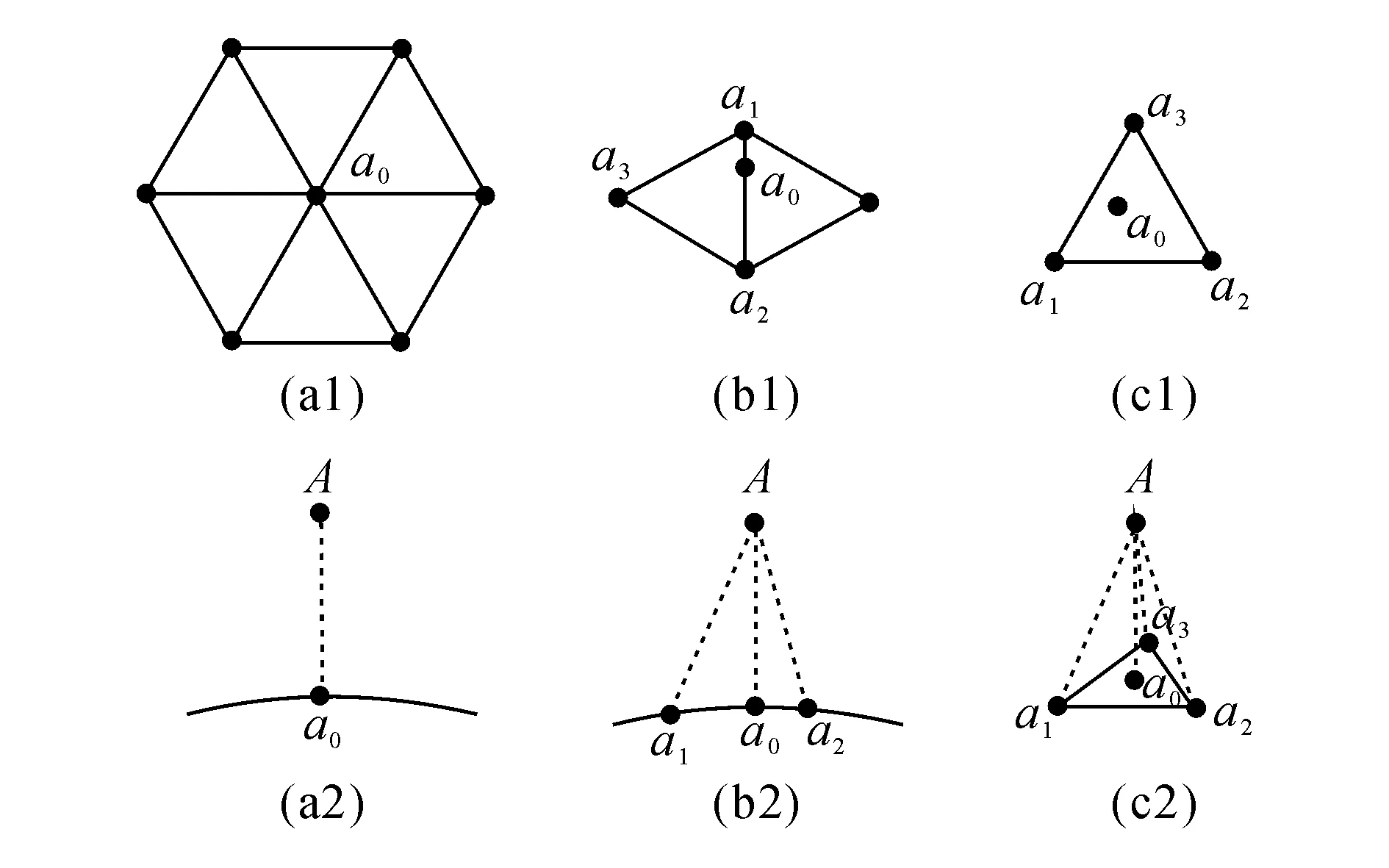
图11 特征光源入射位置和采光点位置的关系示意图Fig.11 Schematic diagram of positional relationship between incident light and lighting point
从最简单的情况开始考虑特征光源入射球面的准确位置和这些采光点位置间的关系,可以得到以下2条显而易见的定理.
定理1当且仅当特征光源入射球面的准确位置落在某个采光点上时,排序后强度从高到低的采光点呈现第2~7这6个采光点的光信号强度几乎相同,且明显比第一个采光点光信号强度弱的现象,如图9(a1)、(a2)所示.
定理2当且仅当特征光源入射球面的准确位置落在某两个相邻采光点连成的曲面线段上时,排序后强度从高到低的采光点呈现第三和第四这2个采光点的光信号强度几乎相同,且比第一和第二这两个采光点小很多的现象,如图9(b1)、(b2)所示.
若排序后强度从高到低的采光点强度呈现出其他现象,则说明特征光源入射球面的准确位置既不落在某个采光点上,也不落在某两个相邻采光点连成的线段上,即必然落在排序后强度最高的3个采光点构成的正三角形内,如图9(c1)、(c2)所示.记特征光源为点A,准确的入射点为a0,排序第1~3的采光点分别为a1、a2、a3,这三个点采集到的光信号强度分别为I1~I3.此时可以建立这样的模型,在一个自身重量忽略不计的正三角形平板的三个角上分别施加方向垂直向下、大小分别为I1~I3的力,在这样的条件下寻求让平板保持平衡的支点,即平板的重心.回归到原问题可知,采用该模型计算出的重心位置是特征光源入射球面的准确位置.可得定理3如下.
定理3当特征光源入射球面的准确位置落在某3个相邻采光点构成的曲面正三角形内时,具体的入射位置可以由曲面正三角形三个角在球面的位置和这3个采光点所采集到的光信号强度建立重心模型计算获得.
由物理知识可知,针对该重心模型求取重心位置的方法如下.在三角形的三条边上分别找出能使两个角上的力平衡的杠杆模型支点,这3个支点和所在边的对角连线交于一点,即为重心.如图12所示,建立直角坐标系求取重心位置并进行误差分析.
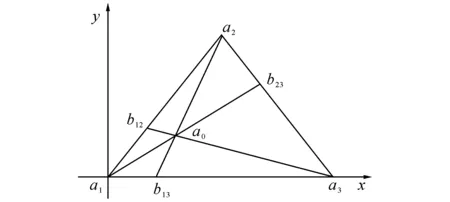
图12 重心模型计算示意图Fig.12 Schematic diagram of gravity model
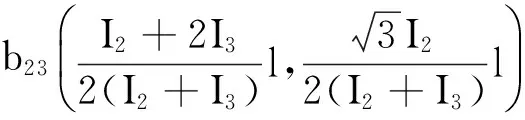
以a1为原点,射线a1a2方向为x轴正方向建立平面直角坐标系,三角形边长为l时,3个角的坐标为
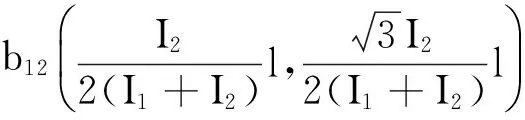
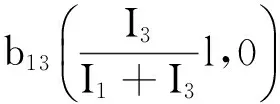
根据I1~I3,3条边上平衡点的坐标为
据此可以得到3条平衡点和所在边对应顶点的连线方程:
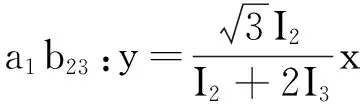


得到交点坐标:

可得特征光源入射球面的准确位置.
特别地,当该点恰好落在正三角形重心上时,有下述推论.
定理3推论当且仅当特征光源入射球面的准确位置落在某3个相邻采光点构成的正三角形重心上时,排序后强度从高到低的采光点呈现前3个采光点的光信号强度几乎相同,且明显比其他采光点的光信号强度大很多的现象.
在Matlab仿真程序中,运用重心模型进行优化,结果如表3所示.可知,在不同的p下,重心模型优化后的定位精度有了不同程度的提升.尤其是当p较大时,该方案的优化效果极其明显.
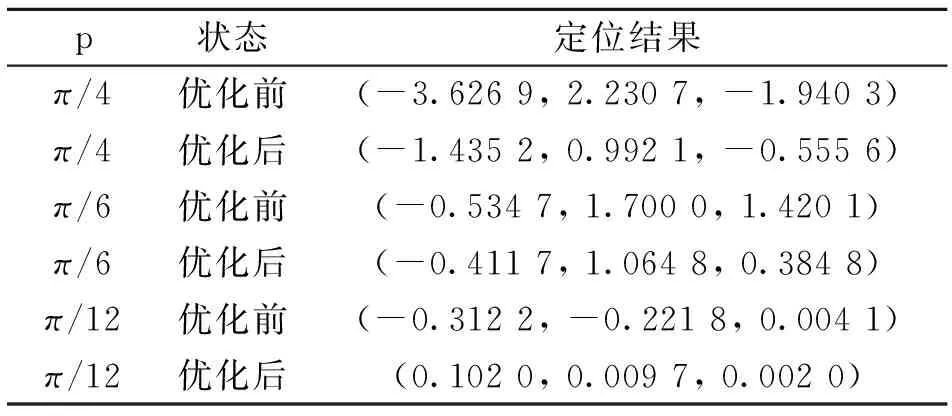
表3 重心模型优化对定位效果的影响
下面从理论上对优化后的定位算法进行误差分析.根据误差传递公式和表达式的对称性,可得
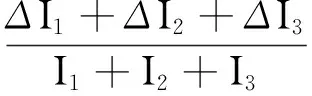
当前室内LED光源光强约为700~2 000cd/m2,而现在常规的亮度计都可以达到0.1~1.0cd/m2的检测精度,即利用该方法所得到的坐标相对误差可以被控制在1‰以内.由于定位的精度很大程度上取决于球面采光点布置的密度,而当制作工艺限制了球面采光点间的最小距离时,该密度由球体大小来决定.当采用直径为d的球形采光装置,在高度为h的室内进行定位时,球形采光装置表面采光点产生的距离误差Δl 所产生的系统误差为Δlh/d.考虑该实验中采用的装置,球体直径约为10cm,球面上采光点布置间距约为1cm.若采用该优化算法,则可以得到误差在0.001cm内的球面准确位置,在高3m的房间内,将会达到3cm左右的定位精度.可以发现,利用重心模型优化后产生的误差和在Matlab仿真中p很小时产生的误差是几乎一致的,这说明了重心模型优化的本质在于在已定装置p的前提下,通过算法优化使得运算中的p进一步降低,从而提升定位精度.
4结论
(1)球面采光模式突破了传统平面采光模式对光源位置的限制,允许光源摆放在室内的任意位置,对硬件部署的要求很低.
(2)基于光信号AoA的定位方式本身具备简易、精确的优势,此外由于运用到了光的粒子性特征,避免了因为光的波动性特征引起的伪光源干扰.
(3)三维空间定位可以获得定位目标的高度信息,而阵列化布局和基于该布局的优化算法进一步提高了定位精度,使得定位结果具有极高的价值.
参考文献(References):
[1] 庄春华, 赵治华, 张益青, 等. 卫星导航定位技术综述[J]. 导航定位学报, 2014, 2(1): 34-40.
ZHUANGChun-hua,ZHAOZhi-hua,ZHANGYi-qing,etal.Overviewonseamlesspositioningtechnologiesofsatellitenavigation[J].JournalofNavigationandPositioning, 2014, 2(1): 34-40.
[2] 陈忠贵, 帅平, 曲广吉. 现代卫星导航系统技术特点与发展趋势分析[J]. 中国科学(E), 2009, 39(4): 686-695.
CHENZhong-gui,SHUAIPing,QUGuang-ji.Analysisoftechnicalcharacteristicsanddevelopmenttrendofmodernsatellitenavigationsystems[J].ScienceinChina(SeriesE) , 2009, 39(4): 686-695.
[3] 姜西瑞. 基于GPS和GSM/GPRS的定位系统的设计与实现[D]. 北京: 中国科学院计算技术研究所, 2006: 8-12.
JIANGXi-rui.ThedesignandimplementationofpositioningsystembasedonGSM/GPRSandGPS[D].Beijing:InstituteofComputingTechnology,ChineseAcademyofScience, 2006: 8-12.
[4] 陈璋鑫.LOS/NLOS无线定位方法研究[D]. 成都: 电子科技大学, 2009: 1-19.
CHENZhang-xin.StudyofLOS/NLOSwirelesspositioningmethod[D].Chengdu:UniversityofElectronicScienceandTechnologyofChina, 2009: 1-19.
[5] 张立立, 钟耳顺. 无线室内定位技术[C]∥中国地理信息系统协会第八届年会论文集. 北京: 中国地理信息系统协会出版社, 2004: 966-973.
ZHANGLi-li,ZHONGEr-shun.Wirelessindoorpositionlocationtechnology[C]∥8thAnnualConferenceProceedingsofCAGIS.Beijing:CAGISPress, 2004: 966-973.
[6] 方震, 赵湛, 郭鹏, 等. 基于RSSI测距分析[J]. 传感技术学报, 2007, 20(11): 2526-2530.
FANGZhen,ZHAOZhan,GUOPeng,etal.AnalysisofdistancemeasurementbasedonRSSI[J].ChineseJournalofSensorsandActuators, 2007, 20(11): 2526-2530.
[7] 汪苑, 林锦国. 几种常用三维室内定位技术的探讨[J]. 中国仪器仪表, 2011, 2(2): 54-57.
WANGYuan,LINJin-guo.IndoorlocationtechniquebasedonRFID[J].ChinaInstrumentation, 2011, 2(2): 54-57.
[8]YOSHINOM,HARUYAMAS,NAKAGAWAM.High-accuracypositioningsystemusingvisibleLEDlightsandimagesensor[J].RadioandWirelessSymposium, 2008,12(1): 439-442.
[9]RAHMANMS,HAQUEMM,KIMKD.IndoorpositioningbyLEDvisiblelightcommunicationandimagesensors[J].InternationalJournalofElectricalandComputerEngineering(IJECE), 2011, 1(2): 161-170.
[10]RAHMANMS,HAQUEMM,KIMKD.HighprecisionhighprecisionindoorpositioningusinglightingLEDandimagesensor[C]∥InternationalConferenceonComputerandInformationTechnology(ICCIT).Dhaka:DhakaPress, 2011: 22-24.
[11] 沈芮, 张剑. 基于可见光通信的室内定位方法[J]. 信息工程大学学报, 2014, 15(1): 41-45.
SHENRui,ZHANGJian.Indoorlocationmethodbasedonvisiblelightcommunication[J].JournalofInformationEngineeringUniversity, 2014, 15(1): 41-45.
[12]ZHANGW,KAVEHRADMV.A2-DindoorlocalizationsystembasedonvisiblelightLED[C]∥PhotonicsSocietySummerTopicalMeetingSeries.Mexico:PlayadelCarmenPress, 2012: 80-81.
[13]CHEOKAD,LIY.Anovellight-sensor-basedinformationtransmissionsystemforindoorpositioningandnavigation[J].IEEETransactionsonInstrumentationandMeasurement, 2011, 60(1): 290-299.
[14] 杜志泉, 倪锋, 肖发新. 光纤传感技术的发展与应用[J]. 光电技术应用, 2014(6): 7-12.
DUZhi-quan,NIFeng,XIAOFa-xin.Developmentandapplicationofopticalfibersensingtechnology[J].Electro-OpticTechnologyApplication, 2014(6): 7-12.
收稿日期:2015-08-18.浙江大学学报(工学版)网址: www.journals.zju.edu.cn/eng
基金项目:浙江省科技厅科技计划公益技术研究基金资助项目(20011C23097);浙江省自然科学基金资助项目(LY12F03023).
作者简介:黄吉羊(1991-),男,硕士生,从事移动医疗、智能家居的研究.ORCID:0000-0002-2822-6613. E-mail:21310164@zju.edu.cn 通信联系人:孟濬,男,副教授.ORCID:0000-0002-7633-3624. E-mail:junmeng@zju.edu.cn
DOI:10.3785/j.issn.1008-973X.2016.07.024
中图分类号:TP 391
文献标志码:A
文章编号:1008-973X(2016)07-1393-09
Three-dimensionalindoorpositioningtechnologybasedoncharacteristiclightsource
HUANGJi-yang,MENGJun,ZHANGRan
(College of Electrical Engineering, Zhejiang University, Hangzhou 310027, China)
Abstract:A three-dimensional indoor positioning technology based on characteristic light source and spherical lighting device was proposed in order to solve the following problems: low accuracy, lots of limitations, lack of height information and poor anti-jamming capability in indoor position system (IPS). The technology measures the angle of optical signal. Spherical lighting device can receive light in all direction and get height information compared with the flat mode. Pseudo-source interference caused by the wave nature will not be introduced with the use of the particle nature of light. Array layout and optimization algorithm can further improve the positioning accuracy. Both simulation experiment in Matlab and physical experiments were conducted. The experimental results and the analysis of accuracy confirmed that the positioning accuracy can be controlled within 0.03 m in a 3 m high room with conventional LED light source, optical fiber and optical sensor. The three-dimensional indoor positioning technology can achieve high accuracy at low cost.
Key words:three-dimensional indoor positioning; characteristic light source; spherical lighting device
