测量机器人隧道变形自动监测系统的研究进展
2016-08-02刘绍堂潘洁晨
刘绍堂,王 果,潘洁晨
(1.河南工程学院 土木工程学院,河南 郑州 451191;2.煤化工资源综合利用与污染治理河南省工程实验室,河南 郑州 451191)
测量机器人隧道变形自动监测系统的研究进展
刘绍堂1,2,王果1,2,潘洁晨1,2
(1.河南工程学院 土木工程学院,河南 郑州 451191;2.煤化工资源综合利用与污染治理河南省工程实验室,河南 郑州 451191)
摘要:在介绍测量机器人隧道变形自动监测系统的原理及结构基础上,采用文献分析和比较分析方法,综合分析测量机器人隧道自动监测系统在隧道结构自动化变形监测中的应用情况。分析表明,测量机器人隧道变形自动监测系统具有精度高、实时、动态、全天候智能远程遥测的优点,在地铁和隧道工程安全监测领域具有一定的应用前景。其局限性是只能逐个单点定期监测,增加工程监测的成本。因此,控制成本、开发多点监测功能并全面实现自动化、智能化和网络化是其发展方向。
关键词:测量机器人;自动全站仪;变形监测;隧道
变形监测关乎施工隧道和运营隧道的安全[1]。传统隧道变形监测多采用经纬仪、水准仪量测等方法,其发展方向[2]是高精度、自动化、实时化和智能化。测量机器人具有自动目标搜索、识别和跟踪等功能[3],它的出现促使隧道工程变形监测的远程自动在线监测系统得到开发和应用。徐进军等[4]从工程测量的观点出发,介绍智能测量机器人的基本构成、原理、特点、精度及应用;刘铁民[5]设计采用徕卡测量机器人检测机器人的监测方案并加以实现,分析远程传输的方法,设计相应的软硬件系统;曹庆磊[6]针对TCA2003测量机器人,利用徕卡公司提供的GEOCOM二次开发工具,在自动监测模块的基础上,完善软件的功能需求;刘林[7]开发一套适用于隧道变形实时监测的软件—TDMS(Tunnel Deformation real-time Monitoring System)。Tang,E.[8]在香港地铁中采用测量机器人系统取得满意效果;Hill,C.D.and Sippel,K.D.[9]把多传感器系统引入隧道变形监测领域;各仪器厂商[10]也顺应时代需求不断改进已有系统并开发功能强大的新系统。已有的研究表明,测量机器人在隧道自动变形监测的应用已经进入实用阶段,但由于成本和功能的局限,其大规模的广泛应用还需进一步研究。
1测量机器人隧道变形自动监测系统的原理及系统结构
测量机器人具有广泛的应用[11],在变形监测领域的应用原理是依靠其伺服马达自动寻标并精密完成斜距、垂直角、高差、坐标等观测量的动态观测[12],在隧道环境下则可以完成隧道收敛、拱顶下沉、地表下沉、三维位移等监测量的连续监测[13]。借助其他软硬件设备可完成数据记录、数据传输、数据处理、图形绘制、变形分析、变形预报等功能[14]。广州市城市复建有限公司张其云[15]采用基于TCA2003测量机器人的全自动动态监测系统,全天候无人值守地在地铁运行间隔内完成地铁隧道变形连续监测,系统无需人工干预,自动实现观测、记录、数据处理、数据存储、报表编制、预警预报等功能,系统的软件和硬件配置包括TCA自动搜标测量机器人、反射棱镜、通讯及供电电缆、计算机与专用软件,其原理和结构如图1、图2所示。
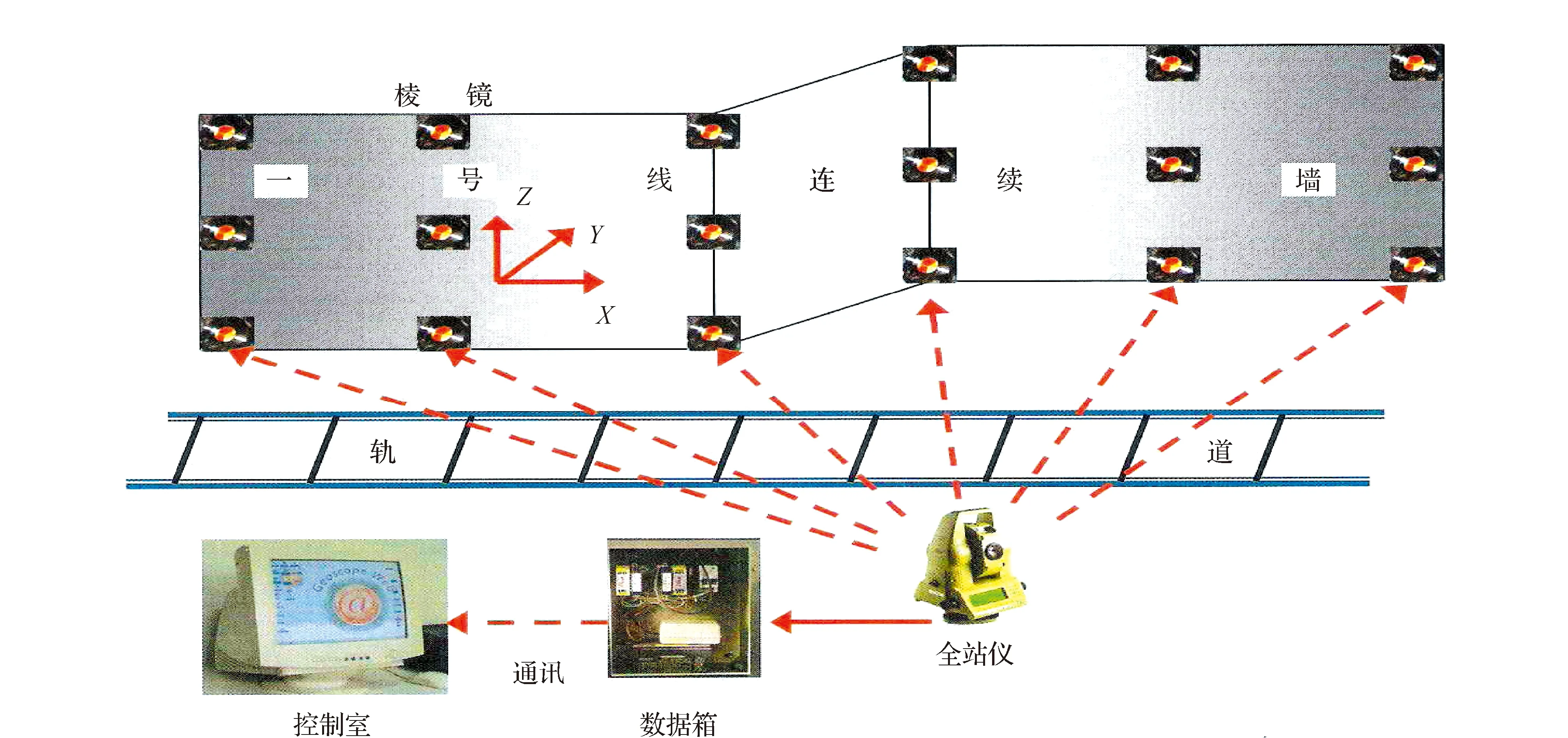
图1 测量机器人自动化监测原理
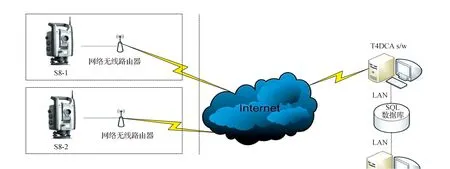
图2 测量机器人自动化监测系统结构
2测量机器人隧道变形自动监测系统的组成
2.1测量机器人(自动全站仪)
测量机器人又称自动全站仪,由于其独有的ATR自动目标识别模式[16],操作人员一旦粗略瞄准棱镜后,测量机器人就可搜寻到目标并自动瞄准,极大提高工作效率[17]。小浪底工程咨询有限公司渠守尚[18]研究认为测量机器人用于变形监测有广泛的应用前景。在国外测量机器人已经被大量使用于隧道和隧道地表的监测中[19],图3(a)是英国Tyne隧道内部的监测系统,在长约300 m的隧道内部,在不同的监测部位的隧道壁设置若干反射镜,用3台联网的测量机器人对其连续观测,每隔几分钟就完成一组自动监测,监测数据通过网络传送到数据中心进行数据处理和分析,及时求出并评估由于毗邻隧道施工导致的现有隧道的变形;图3(b)给出雅典地铁项目中监测隧道地表和建筑物变形的一个应用,一个项目根据其规模的不同,监测系统可以有几台甚至几百台测量机器人同时工作。

图3 隧道变形监测机器人[19]
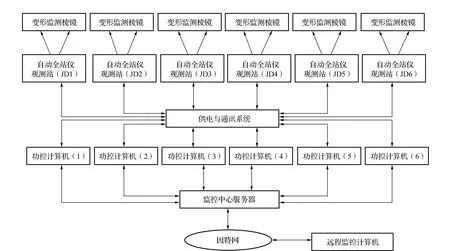
图4 隧道监测机器人的安置
变形监测时,测量机器人要求安置在观测墩上,在控制终端不方便放置在观测墩旁边的情况下,需要在测量机器人与控制终端进行数据通讯,一般在距离比较短的情况,可以采用通讯电缆,或是普通的网络线亦可;在远距离的情况,可采用较为简单的数据传输电台进行通讯,通过电台方式,可以免去电缆铺设的麻烦,设置比较简单,见图4。每一个测站都有持续的电源供应并配有专门的安全锁确保仪器的防盗安全。包欢[20]把自动化测量机器人通过基座固定在仪器墩上,设计监测系统,系统包括观测站、基准点、变形点、中继站、外业计算机和远程监控计算机等,每个监测断面的间距根据相关规范和监测区域的围岩等级来确定,一般在5~50m。设置基准点与变形点的位置特别要利用仪器的小视场功能,使之均匀分布在仪器望远镜的视场内,相互不受干扰[20]。
2.2标准精密测距棱镜
棱镜作为观测标志,利用膨胀螺丝固定在隧道内侧(见图5),其数目可按实际需要设定,该标志能被测量机器人自动跟踪锁定,以实施精密测角和测距[17]。监测棱镜安装在变形区内,通过对监测目标的连续测量分析计算出该变形区的变形量[21]。
2.3计算机和其他设备
计算机利用电缆和测量机器人连接,并装有专用软件以实现整个监测过程的全自动化,计算机除能控制测量机器人按特定测量程序采集监测点数据,并将测量成果实时进行处理,以便及时发现错误,避免返工,也可以对各个观测周期的监测数据进行存储并生成监测报告[15,17](见图6)。
其它设备包括温度计﹑气压计﹑湿度计、连接电缆、外接电源等;温度计﹑气压计﹑湿度计用于测定空气的温度、压力和湿度。将测定结果输入到计算机中,对观测结果进行修正,以提高观测精度[15,17]。

图5 测量机器人标准精密棱镜

图6 控制中心设备
2.4监测软件
不同品牌的测量机器人大多开发了随机软件,近年来很多人对这些系统进行了二次开发[22]。杨绍战[23]采用VB6.0语言和EXCEL数据库,开发了隧道监控量测数据分析处理软件。软件集数据输入、数据管理、数据应用等功能于一体,实现计算的前台可视化界面与监测信息存储的后台数据库的结合;赵骞[24]研究了矿山测量机器人形变监测数据库整合方法,开发基于WebGIS的远程监测应用软件系统;王苑楠等[25]基于GTS-901A智能型测量机器人,开发了用于自动变形监测系统中的机载变形数据采集软件;毛亚纯等[26]介绍了徕卡仪器公司提供的二次开发平台GEOCOM中各模块的功能及主要模块中有关参数的意义和用法,总结了利用GEOCOM编写测量机器人控制软件的经验。贵慧宏[27]以拓普康公司的GTS901A测量机器人为例,实例化测量机器人通用类,获取GTS901A测量机器人对象,开发了GTS901A变形监测自动化软件(GROMA,GeoRobot Online Automatic Deformation Monitoring software);梅文胜等阐述了测量机器人变形监测自动化系统Geo_Def及其应用情况,同时设计基于测量机器人的变形监测系统和数据库的结构,讨论计算机与测量机器人之间的串行控制,在数据处理中加入距离和高差差分处理技术[28]。
无论采用何种软件,系统均需实现两大基本目标:其一是在定时器的管理下周期性自动采集基准点和变形点的观测数据[29];其二是经过适当的数据处理计算,显示和保存变形点的三维变形信息。
3测量机器人隧道变形自动监测系统的功能
测量机器人隧道变形自动监测系统采用专门用于监测的配套变形测量软件,软件运行环境Windows,数据既可以采用数据库存储,也可以通过网络传送[30];既可按操作者设定的测量程序自动完成选点、跟踪、监测、数据处理等一系列工作,也可以采用数据后处理方式按规定要求输出变形曲线、分析报表。测量系统警报组件,当水平或垂直位移限值超过5 mm时可以发送短信给相关人员,以便采取对策。图7为位移—时间的曲线图[19],图中由不同颜色的曲线表达监测断面不同的点的变形情况,根据同一个点在一段时期内的多次监测数据自动绘制沉降、收敛或位移随时间的变化曲线。测量机器人隧道变形自动监测系统还可以根据工程具体特点分析多源数据的变形特征,结合专家经验知识,实现隧道安全状态评估[31]。
监测系统长期连续运行,大大增加监测频度,提高监测数据的可靠性,对于处于危险区域的监测可以实现无人值守,提高监测工作的安全性。
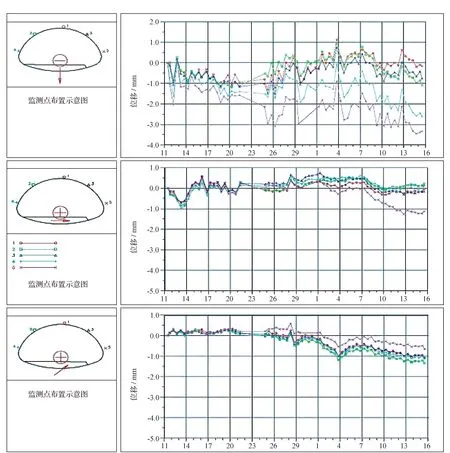
图7 位移-时间的曲线图
4测量机器人隧道变形自动监测系统的监测精度
谯生有[32]通过对对边测量高差和水平基线收敛精度的分析,应用测距固定误差为1 mm的测量机器人量测时,拱顶下沉和水平收敛的精度可达1 mm;应用测距固定误差为2 mm的测量机器人,拱顶下沉量测精度可以达到1.5 mm,当控制视线水平夹角小于60°的情况下,水平收敛量测精度可以达到2 mm,若增加观测次数,取两次测量的平均值时,拱顶下沉精度有望达到1 mm,水平收敛精度有望达到1.5 mm。刘春[33]通过标准基线场的观测实验,对人工测量与GeoMoS自动测量的数据精度进行比较分析,认为GeoMoS系统是可靠的;王凯[34]以实际项目为背景,运用实验与对比的方法,分析TCA2003自动测量机器人照准棱镜的观测精度,绘制各实验点位坐标较差图,结果表明,圆棱镜配合TCA2003自动测量机器人的测量误差在亚毫米级内,可以适用于变形监测,且能满足一般工程应用要求。袁恒等[35]推导测量机器人三维自由设站点和监测点的坐标计算、收敛值计算及精度评定的数学模型,在此基础上进行观测实验并对实验数据进行分析比较。研究和实验结果表明,该方法能够在隧道施工环境下实施,监测精度满足规范的要求,具有一次测量完成多个监测项目的优势,适合在隧道监控量测中应用[36]。曹占虎[37]在分析盾构隧道施工地表建(构)筑物沉降监测、建(构)筑物倾斜监测、裂缝监测、隧道管片隆沉监测、隧道管片水平收敛监测等监测内容、监测方法、监测频率及控制标准的基础上,结合某地铁区间盾构法施工监测工程实践,横向地表沉降、隧道管片沉降或隆起、净空水平收敛监测的结果满足精度需要,得到相应横向地表沉降、纵向地表沉降和沉降过程的规律,以及隧道管片沉降或隆起、净空水平收敛监测变形规律。
5结束语
国内外的研究表明,由测量机器人组成的自动监测系统,在隧道工程中具有精度高、实时、动态、全天候、智能远程遥测的优点,可实现真正意义上的无人值守连续运行的高精度自动形变监测,应用前景广阔;其应用的局限性是只能逐个单点定期监测,在一定程度上增加了成本,降低了工程监测的效率。因此,控制成本,开发多点监测功能并全面实现自动化、智能化和网络化是其发展方向。
参考文献:
[1]ROBINSON B,WEHRLI J M.East Side Access-Queens bored tunnels case study [C].Proc.21st Rapid Excavation and Tunneling Conference,Washington,D.C.,23-26 June,2013:1014-1041.
[2]吴忠杰,罗根传,刘新喜.隧道监测系统研究现状及其发展趋势[J].吉首大学学报(自然科学版),2012(6):70-76.
[3]www.epoch-suite.com-Epoch Suite Tutorial and Manual,2015,06,20.
[4]徐进军,张民伟,何长虹.几种动态测量传感器综述[J].测绘信息与工程,2005(2):44-46.
[5]刘铁民.地铁既有线变形远程自动监测系统研制[D].西安:西安工业大学,2010.
[6]曹庆磊.基于智能全站仪的自动变形监测系统开发及其在隧道监测中的应用[D].青岛:山东科技大学,2011.
[7]刘林.隧道变形实时监测系统的研究[D].成都:西南交通大学,2012.
[8]TANG E.Application of automatic deformation monitoring system for Hong Kong KSL railway.Monitoring Strategic Integration of Surveying Services.Proceedings of FIG Working Week,2007:299-302.
[9]HILL C D,Sippel K D.Modern Deformation Monitoring:A Multi Sensor Approach[M]. FIG XXII International Congress,Washington DC,USA.2002.
[10] Leica Geosystems,Automated High Performance Total Station TCA2003,http://www.leica-geosystems.com.2015.06.20.
[11] LIU S,LIU X,YANG F.Control surveying and structural health monitoring applied in large bridge[J].2013.Advanced Materials Research,2013,63(1):243-246.
[12] LIU Chenglong,YANG Xuefeng,ZHANG Yuechuan.New method of second-order height control surveying based on georobot[J].Journal of Southwest Jiaotong University.2013,48(1):69-74.
[13] PAPASTAMOS G,STIROS S,SALTOGIANNI V,et al.3-D strong tilting observed in tall,isolated brick chimneys during the excavation of the Athens Metro Applied Geomatics [J].2015 (2):115-121.
[14] SONI A,ROBSON S,GLEESON B.Structural monitoring for the rail industry using conventional survey,laser scanning and photogrammetry Applied Geomatics [J].2015 (2):123-138.
[15] 张其云,郑宜枫.运营中地铁隧道变形的动态监测方法[J].城市道桥与防洪,2005(4):87-89.
[16] XIAO Guofeng,YANG Junbo,CHEN Congxin.A new method of laser convergence monitoring and its precision assessment[J].Rock and Soil Mechanics.2014(3):896-900.
[17] 刘绍堂,王志武.隧道围岩收敛监测方法及其特点[J].铁道建筑,2008(7):44-46.
[18] 范本.测量机器人地铁隧道建设自动变形监测研究[J].测绘与空间地理信息,2015,38(1):189-191.
[19] CHMELINA K.Improvement of the safety and profitability of tunnel drives through the use of automated measurement and alarm systems-examples in practice.Geomechanics and Tunnelling[J].2010,3(2):215-218.
[20] 包欢,徐忠阳,张良琚.自动变形监测系统在地铁结构变形监测中的应用[J].测绘学院学报,2003(2):103-105.
[21] BERBERAN A.Multiple Outlier Detection,A Real Case Study[J].Survey Review,2005,33 (255):41-49.
[22] BERBERAN A,MACHADO M,BATISTA S.AUTOMATIC MULTI TOTAL STATION MONITORING OF A TUNNEL[J].Survey Review,2007,39(305):203-211.
[23] 杨绍战.隧道施工监控量测数据分析处理软件的开发及应用[D].西安:长安大学,2009.
[24] 赵骞.矿山测量机器人监测数据整合和远程监测应用软件开发[D].太原:太原理工大学,2011.
[25] 苑楠,井发明,刘冠兰.基于GTS901A全站仪的自动变形监测软件设计与实现[J].城市勘测,2009(6):106-109.
[26] 毛亚纯,王恩德,陈永生,等.利用GEOCOM开发测量机器人自动变形监测软件的有关问题及解决方法[J].金属矿山,2010(3):94-96.
[27] 贵慧宏,张锦,陈永剑.基于GTS901A的测量机器人变形监测自动化软件的开发[J].测绘科学,2010(4):166-168.
[28] 梅文胜,张正禄,郭际明,等.测量机器人变形监测系统软件研究[J].武汉大学学报(信息科学版),2002(2):165-171.
[29] BRY' H.The problem of horizontal refraction in setting out tunnel control networks[J].Geomatics,Landmanagement and Landscape.2014(4):25-35.
[30] BARONTI P,PILLAI P,CHOOK V W C,et al.,Wireless Sensor Networks):A Survey on the State of the Art and the 802.15.4 ZigBee Standards[J].Computer Communications,2007,30(7):1655-1695.
[31] 黄惠峰,张献州,张拯,等.基于BP神经网络与变形监测成果的隧道安全状态评估[J].测绘工程,2015,24(3):53-58.
[32] 谯生有.全站仪在软弱围岩初期支护变形量测中的应用[C]//中国铁道学会.铁路长大隧道设计施工技术研讨会论文集,北京:知网空间:会议论文库,2004,4.
[33] 刘春,倪涵.GeoMoS自动监测系统与观测数据精度分析[J].水电自动化与大坝监测,2006(2):41-44.
[34] 王凯,余代俊.TCA2003照准棱镜精度分析[J].地理空间信息,2012(2):76-78.
[35] 袁恒,刘成龙,卢杰,等.全站仪三维自由设站隧道非接触监控量测原理及精度分析[J].工程勘察,2012(8):63-67.
[36] Tacs GmbH.Summary of the acs guidance system.On-line:www.tacsgmbh.de,Accessed:2015/06/03.
[37] 曹占虎.某地铁区间盾构法施工监测分析[J].测绘工程,2014,23(9):70-73.
[责任编辑:张德福]
DOI:10.19349/j.cnki.issn1006-7949.2016.10.009
收稿日期:2015-07-12
基金项目:河南省重点科技攻关计划(122102210421);河南省教育厅科技攻关计划(2010A420001)
作者简介:刘绍堂(1965-),男,教授,博士.
中图分类号:U451+.2
文献标识码:A
文章编号:1006-7949(2016)10-0042-07
Development of georobot tunnel deformation monitoring system
LIU Shaotang1,2,WANG Guo1,2,PAN Jiechen1,2
(1.School of Civil Engineering,Henan Institute of Engineering,Zhengzhou 451191,China;2.Henan Province Engineering Laboratory of Comprehensive Utilization of Coal Resources and Pollution Control,Zhengzhou 451191,China)
Abstract:In order to assess the value of the georobot tunnel deformation monitoring system,this paper presents the principle and structure of georobot tunnel deformation monitoring system,then analyzes the application based on the literature and comparative analysis.The analysis shows that the automatic monitoring system has high precision,real-time,dynamic,intelligent and remote telemetry advantages in the field of safety monitoring of the subway and tunnel engineering.And it also has a broad applicative prospects.But its limitation is targetted at its single point monitoring which greatly increases the cost of the monitoring.Therefore,its development direction lies on the lower costs and comprehensive multi-point monitoring system.
Key words:georobot;automatic total station;deformation monitoring;subway tunnel
