基于总体最小二乘匹配的机载LiDAR点云航带平差方法
2016-08-02袁豹
袁 豹
(苏州市测绘院有限责任公司,江苏 苏州 215006)
基于总体最小二乘匹配的机载LiDAR点云航带平差方法
袁豹
(苏州市测绘院有限责任公司,江苏 苏州 215006)
摘要:机载LiDAR技术在快速获取空间三维地理信息及其应用方面具有不可估量的前景,然而,机载LiDAR系统获得的相邻航带点云数据在重叠区存在“漂移”问题,需要采用航带平差的方法实现不同航带点云数据之间的“无缝”拼接。针对最小二乘航带平差方法中存在的某些不足,结合总体最小二乘与航带平差方法,将总体最小二乘应用于点云的平面拟合,从而提高了相邻航带匹配的精确性。采用实际飞行数据,设计实验方案对航带平差效果进行比较分析。
关键词:机载LiDAR;航带平差;总体最小二乘;平面拟合;匹配
机载激光探测与测距技术(AirborneLightDetectionAndRanging),简称为机载LiDAR技术,是一种新型的主动式空间对地观测技术,在快速获取空间三维地理信息方面具有前所未有的优势[1]。目前,机载LiDAR系统的扫描幅宽受到扫描角度和飞行高度的限制,使得系统不具备遥感成像技术大面积影像测量的能力,只能对需要作业的区域进行多条航带飞行来获得整个作业区域的点云数据,并且规定相邻航带之间保持10%~20%的重叠度[2]。同一地物目标在不同航带之间存在空间“漂移”的误差,如图1所示,需要对机载LiDAR点云数据进行航带平差处理,用以消除或是尽可能减小相邻航带同名地物之间的偏差,获得整个作业区域不同航带之间的“无缝”拼接产品[3]。
根据同一地物在不同航带之间存在的空间位置偏移,建立相应的数学模型,采用匹配原理将重叠区域的点云数据联系起来,并采用相应的平差模型解算重叠区域之间的参数,从而改正不同航带中的点云数据,即为航带平差技术[4]。机载LiDAR点云数据的特殊性使得航带平差过程中的点云匹配变得尤为复杂。不同学者[5-8]针对点云数据的不同表现特性,依据不同的数学模型,从不同角度建立点云匹配的关系和平差模型,来尽可能优化航带平差的模型。其中,最小二乘点云匹配模型是航带平差过程中常用的方法[9],然而该类方法未曾考虑到最小二乘方法本身存在的些许不足——没有顾及两类观测数据同时含有误差的情况,而只是对观测值中含有的误差进行了最佳改正。航带平差的目的是为了实现相邻航带之间的最佳匹配,仅仅考虑某一条航带的误差并依据最小二乘点云匹配的方法进行航带平差的效果并不能取得整个航带点云数据精度的提高。所以,本文将总体最小二乘方法引入到相邻航带点云匹配的模型建立中,同时考虑两条相邻航带数据的误差,建立总体最小二乘点云匹配模型,克服最小二乘方法的缺点,并依据实测飞行数据进行实验分析和论证。

图1 两条航带重叠区同名地物的“漂移”现象
1总体最小二乘匹配模型
最小二乘匹配方法的航带平差方法重在目标面点云对应平面的搜索和平面方程的建立、最小二乘匹配准则的建立。对于目标面中每个点对应的点云搜索,采用KD树索引结构组织目标点云数据并搜索得到其最邻近的参考面点云中的点云进行平面方程的拟合。由于参与平面方程拟合的点个数大于3个,此时就需要采用多点平面拟合的方法来进行平面方程的拟合。最小二乘方法平面拟合是将平面方程改写为高程变量的函数方程,建立误差方程求解出平面方程的参数。分析机载LiDAR点云的数据特性,可知LiDAR点云数据的平面坐标分量的精度是低于高程方向坐标精度的,而且可能相差到一个数量级。所以在平面方程拟合的过程中必须同时考虑LiDAR点云数据在平面和高程方向上的误差并赋予不同的权重来计算平面方程的参数,建立总体最小二乘匹配模型(TotalLeastSquareMatchingModel,TLSMM)。
1.1总体最小二乘平面拟合模型
为了直观显示平面方程的参数组成和求解要求,将一般平面方程的形式改写为高程方向的函数表达形式
(1)
式(1)中含有3个平面方程参数a0,a1,a2,需要3个不在一条直线上的三维坐标点数据。这样表示与地理信息空间模型相一致,即高程方向值是与平面二维坐标对应且随着平面二维坐标的变化而变化,符合地形趋势变化的数学描述。
传统方法是依据式(1)列立误差方程,根据最小二乘准则在高程方向残差平方和最小的条件下解算求得平面方程的最小二乘最佳估计参数。而针对机载LiDAR数据来说,其获取系统在平面方向和高程方向所能达到的数据精度是不相同的,而且高程方向(即Z方向)的数据精度是优于平面二维坐标的数据精度的,所以在进行平面方程的拟合过程中不能仅仅依靠高程方向残差平方和最小原则来实现平面方程参数的无偏估计,而是应该在综合考虑二维平面坐标和高程方向坐标的误差,采用总体最小二乘平差方法来进行平面方程参数的最优无偏估计。
将式(1)写为矩阵形式为
(2)
考虑到系数矩阵A和观测值矩阵Z都含有测量偶然误差,建立总体最小二乘平面拟合函数模型如下:
(3)

1.2平面拟合定权分析

1.3点云匹配定权分析
在基于总体最小二乘方法的航带平差中采用的点云匹配要素依然是目标点云中激光扫描点到参考点云中对应平面的垂直距离,从目标点云与参考点云之间的相对关系出发,采用一种较为快速有效的点云匹配定权方法——距离定权法。目标点云经过一次坐标变换后得到变换后的点云数据,可以计算得到该点云中每个点到其所对应的平面的垂直距离。总体最小二乘点云匹配的原理是两个点云不断相互接近、缩小偏差的过程,所以目标点云中每个激光扫描点到对应所在平面的距离应该是处在一个阈值范围内的数值。根据这一特性,即可按照目标点云在进行下一步坐标变换前计算每个目标点云激光扫描点到其对应平面的距离来对下一次点云匹配数学模型的观测值矩阵作定权处理,并以距离绝对值大小的倒数作为权值的大小,表示为数学形式为
(4)
这种定权方法可以很好地抑制异常点云数据对匹配结果的影响,达到控制粗差、增强程序鲁棒性的效果。
2实验数据处理与分析
2.1数据来源
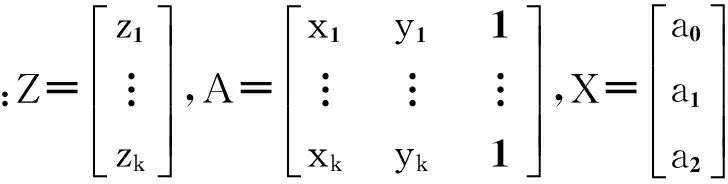
本文实验数据来源于黄河小浪底库区及枢纽管理区机载激光雷达航测及1∶1 000 比例尺DOM、DEM、DSM成果制作项目,航测范围如图2所示。
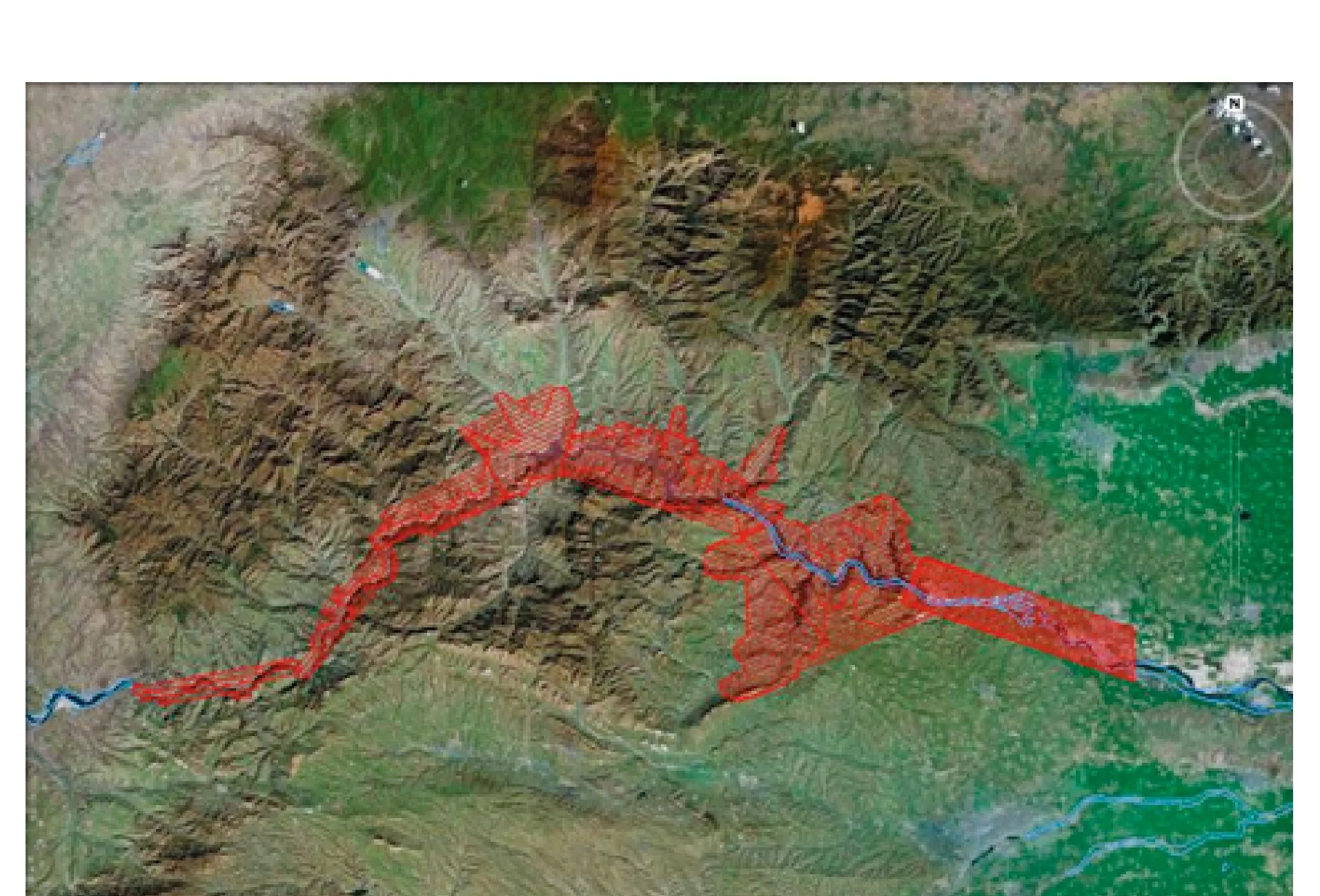
图2 小浪底库区、枢纽管理区航测范围
测区位于黄河主干道,平均海拔350m,最高海拔800m,属于山地地形。测区中分布有居民地、道路、植被树木等。数据采集使用的机载LiDAR系统为加拿大进口的国际上性能最为优越的机载LiDAR航测设备ALTMGemini。
项目外业数据采集时间为2012-07,飞行高度为1 000m(比例尺1∶2 000),得到LAS1.0标准格式数据。鉴于数据保密性的要求,本文截取枢纽管理区部分点云数据进行实验分析,该部分点云包含有较多居民地、道路等地物信息,同时植被等地貌信息也较为丰富。相邻航带重叠率约为20%,平均扫描点密度为2.20点/m2,第一条航带点云个数为1 830 091,数据量为48.8MB,第二条航带点云个数为1 598 130,数据量为42.6MB。实验区域点云高程图如图3所示。
图3 实验数据点云高程图(白色多边形框为重叠区域)
2.2实验方案与结果分析
分别采用本文提出的方法和已有的数据处理方法对航带重叠区域进行匹配处理,选取重叠区域某一处剖视图作为匹配效果对比的采样区域,如图4所示。
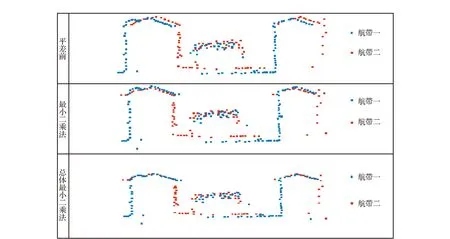
图4 重叠区域中剖面平差前后剖视图
从点云剖视图可以看出:平差前,两相邻航带由于系统各种误差的存在导致重叠区同名地物在某个方向上存在偏差,在房屋等硬质地物点云出表现十分明显;基于最小二乘匹配和总体最小二乘匹配的两种航带平差方法都可以对同名地物点云之间存在的误差进行很好的改正,改正后的重叠区地物点云融合效果较好,不会出现数据“矛盾”。
在相同实验条件下,给定相同的迭代限差,分别采用基于最小二乘匹配和总体最小二乘匹配两种方法对点云进行航带平差处理,将重叠区域点云分别剔除粗差数据后,航带一参与计算的点云量为354 318个,航带二参与计算的点云量为309 226个,记录两种方法的迭代次数、计算时间和模型精度,从而评价两种方法的优劣,计算结果列于表1。
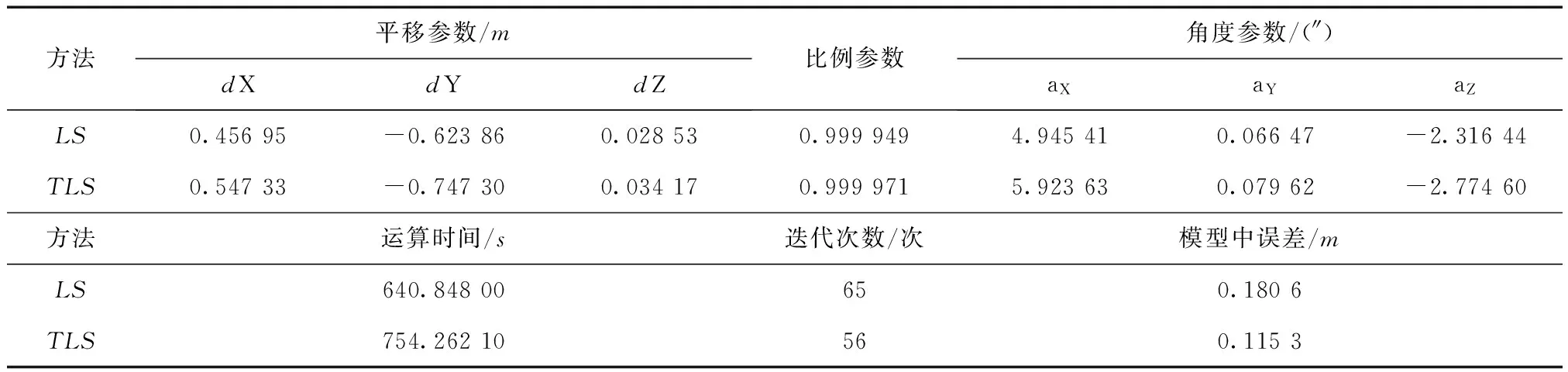
表1 平差结果对比
采用点云之间相对精度作为航带平差效果的精度评价指标。点云之间相对精度评价包括水平精度和高程精度两个方面的指标,相对水平精度评定可以通过对两个航带点云分别拟合同名地物来计算水平偏移量,同名地物可以是直线、曲线或者是平面等,若有多处同名地物拟合得到的偏移,则取重叠区多个拟合所得的偏移量的平均值作为点云相对水平精度的评价指标。本文针对平差前后同一地物特征在水平方向的偏移量的大小不同,采用Terrasolid软件中AccuDraw工具量取偏差值在平差前后的大小,以衡量点云相对水平精度。点云相对高程精度的评定方法采用“平均幅度”这一度量指标,“平均幅度”是商业软件Terrasolid中Terramatch模块的MeasureMatch工具量测得到。
平差前后两相邻航带重叠区点云在相对水平和相对高程方向上的精度改进情况见表2。
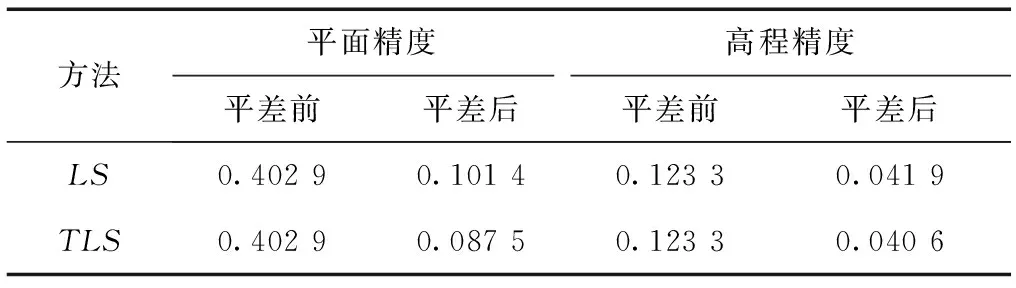
表2 平差效果对比 m
从表1结果分析可知,基于最小二乘匹配和基于总体最小二乘匹配的两种航带平差方法在相同迭代限差条件下迭代终止时计算得出的点云转换参数在数值上较为接近,而从二者计算的模型中误差结果上看,可以发现采用总体最小二乘匹配的航带平差方法的模型中误差较小,具有较高的模型精度。这是因为总体最小二乘匹配的航带平差模型在建立模型时考虑了两个航带点云数据的误差,并对模型参数和观测值量分别采用不同的权分析方法确立权矩阵,在一定程度上抑制了点云数据误差对模型精度的影响。迭代时间和迭代次数上来看,总体最小二乘匹配方法并不显得具有很大优势,这是因为在总体最小二乘航带平差的方法中,对目标点云中每个点搜索的到最邻近的K个点之后需要进行总体最小二乘平面拟合并考虑点云数据精度不同的影响,此外在计算点与所属平面的法向距离时也特意考虑了该项观测值的权矩阵,这样就无形中加大了模型的运算量和内存负荷,所以两种方法在所需时间上相近,甚至需要比最小二乘迭代算法更多的计算时间,并因此带入更多难以有效去除的误差。然而这一结果的出现并非就此得出点云匹配的区域越大,所得到的匹配效果就越不好的结论。在保证匹配点云或是匹配要素选取精度的条件下,适量增加匹配要素是可以达到较好的匹配效果的,因为这是符合数据处理理论的提高模型精度的有效手段。
针对实际点云地物属性及分布情况,选取重叠区一“人字形”房屋尖顶面作为平差效果的比较,使用AccuDraw量测工具量取同名地物(屋脊线)在X,Y,Z方向上距离差值的具体变化情况,比较平差前后距离差值dx,dy,dz的变化来评价航带平差的效果。重叠区域同名的尖顶房屋位置及距离偏差量取如图5所示,其中圆圈代表屋顶所在区域,箭头表示剖面方向。
表3列出了实验方案在平差前后对同名地物之间存在的偏差进行改正的具体结果。
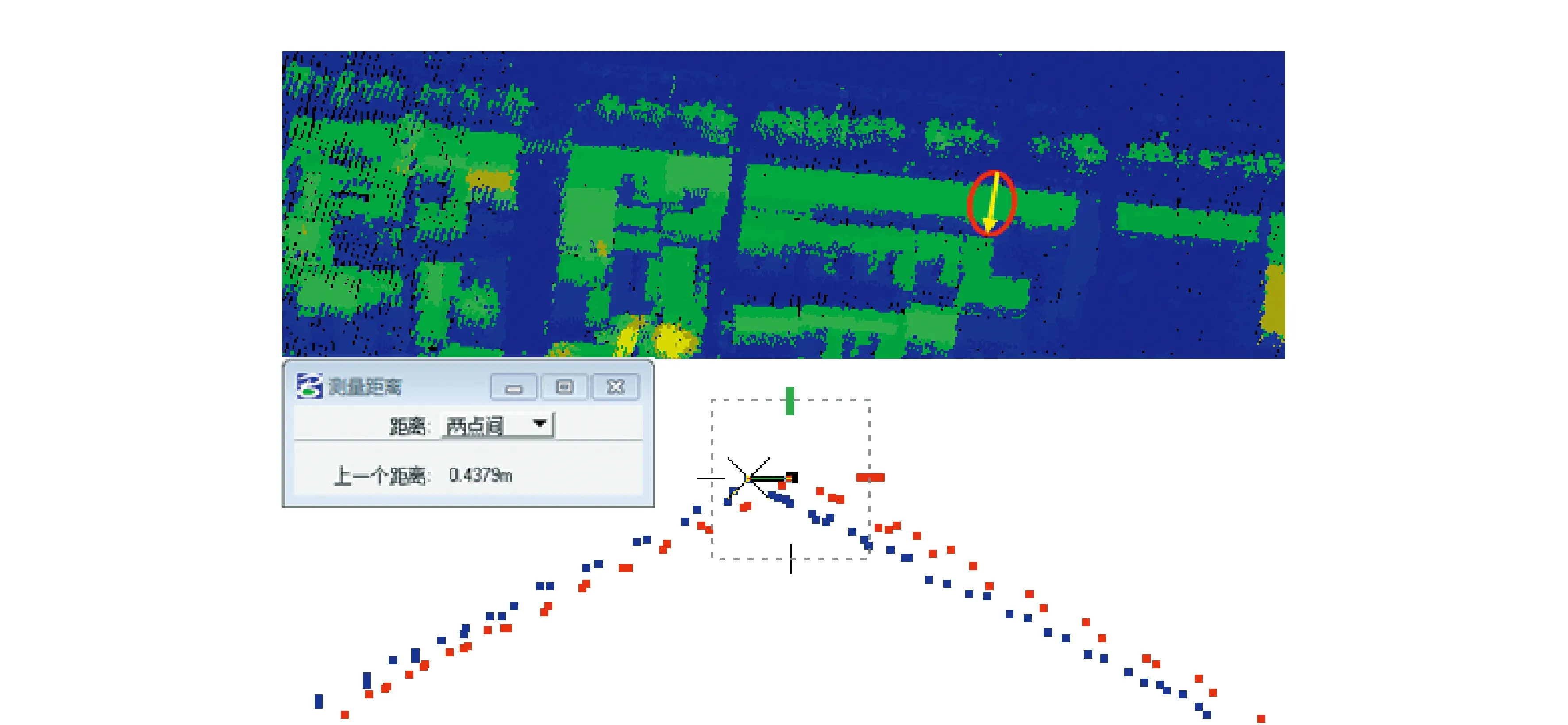
图5 同名地物位置及偏差量取示意图

m
2.3实验结论
从以上图、表结果及相关分析,可以得到以下实验结论:
1)由于机载LiDAR系统获得点云数据在高程方向上的精度要高于水平方向,所以采用一定的航带平差方法对重叠区同名地物之间存在的数据“漂移”在高程方向和水平方向进行改正的效果不同,平差处理后点云之间相对高程精度可以很好地提升,而相对水平精度的改进还不是十分明显。
2)总体最小二乘方法是一种顾及观测数据各个方面存在的偶然误差的平差方法,在采用基于总体最小二乘匹配方法的航带平差对重叠区点云进行平差处理后,可以有效地抑制点云数据水平方向上的低精度性对匹配结果的影响,实验结果证明采用基于总体最小二乘点云匹配方法的航带平差效果要优于最小二乘点云匹配方法,并且在平差后点云同名地物之间的偏差改正方面有着较好的效果。但是基于总体最小二乘匹配的航带平差方法因为增加了算法的复杂性和模型的计算量,在处理大数据量点云匹配问题时需要很好的硬件条件和一定的时间要求。
3)进行航带平差处理时,要慎重选取参与航带平差处理的重叠区点云数据,尽量优选具有良好面状特性且便于拟合地物方程进行匹配的点云,因为重叠区点云数据范围和点云数据类别及属性的不同对航带平差的效果有着重要的影响。
3结论
本文针对最小二乘点云匹配方法在机载LiDAR点云航带平差时表现出的某些不足,将总体最小二乘方法引入到平面拟合中,讨论了总体最小二乘点云匹配方法在机载LiDAR点云航带平差过程中的各个细节问题,采用实际飞行数据作为实验数据对新方法进行了实验分析,得到结论:基于总体最小二乘匹配的机载LiDAR点云航带平差方法具有一定的可靠性和实用性,如何将其更好地应用在点云匹配与航带平差中仍是值得探讨的课题。
参考文献:
[1]张召才.地形起伏对推扫式遥感立体成像影响的关键理论和技术研究[D].天津:天津大学,2012.
[2]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007.
[3]王丽英,宋伟东.机载LiDAR点云航带平差方法研究[J].武汉大学学报(信息科学版),2012,37(7):814-818.
[4]SHANJ,TOTHCK.Topographiclaserrangingandscanning:principlesandprocessing[M].CRCPress,2008.
[5]尚大帅,马东洋,高振峰,等.机载LiDAR点云数据与影像数据融合[J].测绘工程,2012,21(1):18-20.
[6]CROMBAGHSM,MINED,BRUEGELMANNR.Ontheadjustmentofoverlappingstripsoflaseraltimeterheightdata[J].InternationalArchivesofPhotogrammetryandRemoteSensing,2000(33):230-237.
[7]张熠斌.机载LiDAR点云数据处理理论及技术研究[D].西安:长安大学,2010.
[8]赵大伟,裴海龙,丁洁,等.无人机机载激光雷达系统航带拼接方法研究[J].中国激光,2015,42(1):1-6.
[9]王丽英,宋伟东,孙贵博.机载LiDAR数据航带平差研究进展[J].遥感信息:综述,2012(2):120-129.
[10] 袁豹,岳东杰.加权总体最小二乘法及其在GPS高程拟合中的应用[J].勘察科学技术,2013 (2):43-45.
[责任编辑:刘文霞]
DOI:10.19349/j.cnki.issn1006-7949.2016.10.011
收稿日期:2015-05-12
作者简介:袁豹(1988-),男,助理工程师,工学硕士.
中图分类号:P237
文献标识码:A
文章编号:1006-7949(2016)10-0053-06
A method of airborne LiDAR point cloud strip adjustment based on total least squares registration
YUAN Bao
(SuzhouSurveyingInstituteCo.,Ltd.,Suzhou215006,China)
Abstract:Airborne LiDAR technology has an incalculable prospect in quick access to spatial three-dimensional geographic information and concerning applications.However,there has been a problem of data drifting in overlap region from two adjacent air-strips,and strip adjustment methods are required to splice the point cloud data from different strips seamlessly.Due to some deficiencies existing in the strip adjustment method based on least squares,a method of strip adjustment based on total least squares is combined in this paper,which applies total least squares to the plane fitting of point cloud,thereby improving the registration accuracy of adjacent strips.The actual flight data are used to design the experiment to compare and analyze the effects of two different methods in strip adjustment.
Key words:airborne LiDAR;strip adjustment;total-least squares;plane fitting;registration
