基于SINS/GPS的无人机组合导航系统建模与仿真
2016-08-02史丰丰寇凯洋
王 磊,史丰丰,寇凯洋,张 钊
(北京卫星导航中心,北京 100094)
基于SINS/GPS的无人机组合导航系统建模与仿真
王磊,史丰丰,寇凯洋,张钊
(北京卫星导航中心,北京 100094)
摘要:根据无人机的飞行特点以及SINS(捷联惯导)和GPS(全球定位系统)的优缺点,利用轨迹发生器设计无人机的飞行轨迹,建立基于SINS/GPS的无人机组合导航系统,依据卡尔曼滤波的相关原理对系统进行数学建模和计算仿真,验证无人机SINS/GPS组合导航系统的可靠性。
关键词:无人机;飞行轨迹;SINS/GPS组合导航;卡尔曼滤波
无人机是一种现代高技术含量的航空飞行器,随着科学技术的不断发展,无人机在全球各国的经济、社会、军事等领域有着越来越广泛的应用[1-3]。无人机的技术特点决定其经常要在地形险要、气候恶劣的环境中执行任务,因此对其飞行的各项数据,如位置、速度、姿态等参数的精度均提出很高的要求,作为关键子系统之一的导航系统,在无人机的飞行过程中起着极其重要的作用。目前的无人机导航系统主要有SINS(捷联惯导系统)、无线电导航系统、GPS、大气数据系统、地磁导航系统等[4]。各类导航系统各有不同的特点,将各传感器的导航数据进行融合,根据不同环境和任务的需求合理利用信息源是无人机导航系统设计的问题核心。
SINS(捷联惯导系统)是一种通过以自身惯性原件来敏感载体相对惯性空间的角速度和加速度信息来确定载体位置、速度、姿态的全自主式导航系统,能提供载体实时连续的完整导航参数,具有很高的抗干扰能力和保密性能,但其自身存在导航误差随时间累积而发散的缺陷。
卫星导航系统是一种天基无线电导航系统,GPS是其中的杰出代表,具备全天时、全天候的实时导航能力,具有数据输出稳定、精度较高、使用成本低等优势,但也存在数据输出率低,信号易失锁而无法提供连续的导航信息等缺点。
综合考虑无人机的特性以及SINS与GPS两种导航系统各自的优缺点,将二者有机结合,构成SINS/GPS组合导航系统,能有效地吸取两者的优势并弥补彼此的不足,大大提高系统的导航精度、数据更新率和抗干扰能力,可作为一种无人机导航系统的可靠技术方案[5-6]。
1SINS/GPS组合导航系统的数学模型
1.1无人机飞行轨迹设计
要对无人机飞行过程中的导航信息进行数学验证,首先要进行无人机的飞行轨迹设计。飞行轨迹的设计思想是根据无人机飞行中的运动数学特性和规划好的轨迹信息,利用SINS的导航信息源实时积分解算以得到地理坐标系下的位置、速度、姿态等参数,来获取飞机的飞行航迹信息,不同的飞行阶段,可通过不同的控制方式模拟运动轨迹。
本文设计的无人机飞行状态为:加速-爬升-匀速-爬升-匀速-右转弯-匀速-左转弯-匀速-俯冲-匀速-俯冲-匀速-减速,飞行时间为3 000s。根据SINS算法中加速度、速度、位置、姿态角的变化规律及耦合关系所设计的飞行轨迹仿真如图1所示。
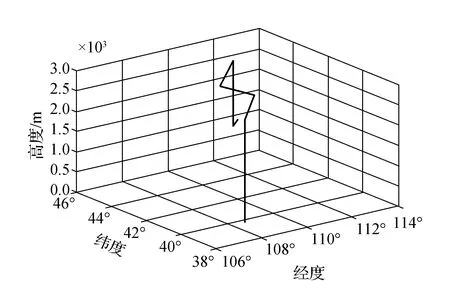
图1 无人机飞行轨迹仿真
1.2SINS/GPS组合导航系统的建模
SINS/GPS组合导航系统可采用经典的卡尔曼滤波算法,在其数学模型中包含系统的状态方程与量测方程。
将SINS的误差作为状态量,则状态方程表示为

(1)

其中,φE,φN,φU是东北天当地水平坐标系下三轴的平台失准角误差;δvE,δvN,δvU是东北天3个方向的速度误差;δL,δλ,δh为地球坐标系下的纬度、经度和高程误差;εx,εy,εz为载体坐标系下三轴的陀螺常值漂移;x,y,z为载体坐标系3个方向的加速度计常值偏置。
W(t)为系统噪声,包含陀螺仪和加速度计的过程白噪声。F(t),G(t)分别为状态转移矩阵和系统噪声驱动矩阵。
本文的组合导航系统设计采取位置、速度组合的松组合方式,将SINS与GPS解算的位置、速度的差值作为量测量,则量测方程为

(2)
式中:V(t)为GPS的量测白噪声;H(t)为量测矩阵。状态方程和量测方程中各参数的具体表达式可见相关文献。
根据计算需要,将系统方程进行离散化,可得离散化方程
(3)
根据式(3),离散型卡尔曼滤波表达式为
(4)

将系统的采样周期取为ΔT,利用求解矩阵指数的方法,Φk,k-1,Γk-1各取到第三阶后的离散化形式为
(5)
(6)
2仿真分析
本文利用MATLAB软件进行程序设计,对SINS和SINS/GPS组合导航系统的各项误差进行仿真比较,仿真的初始条件设置为:
SINS解算的3个初始平台角误差分别为1′、1′、1′,3个方向的速度解算误差为0.2m/s、0.2m/s、0.1m/s,3个方向的位置解算误差为5m、5m、3m,陀螺常值漂移分别为0.01°/h、0.01°/h、0.01°/h,加速度计常值偏置分别为1×10-4g、1×10-4g、1×10-4g,SINS的解算周期、Φk|k-1和Γk-1的离散化周期均为0.01s,GPS解算的初始位置量测噪声方差分别为2m、2m、1m,初始速度量测噪声方差分别为0.05m/s、0.05m/s、0.05m/s,GPS解算周期和组合导航滤波周期均为1s,采用本文设计的飞行轨迹,仿真结果如图2~图5所示。

图2 SINS解算的位置误差
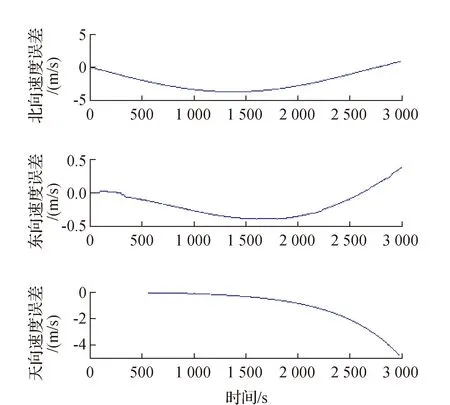
图3 SINS解算的速度误差

图4 SINS/GPS组合导航的位置误差

图5 SINS/GPS组合导航的速度误差
从以上仿真结果能看出,SINS解算的误差明显随时间的累积而发散,这是由于加速度计本身的常偏经过对时间的积分后不断增大,使得位置和速度的解算误差越来越大。同时由于姿态与位置速度的耦合关系,平台角误差和陀螺的常值漂移也会对位置和速度的解算产生影响,因此SINS不能作为无人机独立的导航系统。而经过卡尔曼滤波处理后的SINS/GPS组合导航系统,位置和速度误差明显收敛,3个方向的位置误差可达到1m以内,速度误差可达到0.05m/s以内,导航精度得到明显提高,达到导航参数最优估计的理想效果。
3结束语
导航系统的性能对无人机能否高质量完成任务起到至关重要的决定性作用。将SINS与GPS有机结合,构成一种优势互补的SINS/GPS组合导航系统,可根据无人机的飞行环境及特性,通过卡尔曼滤波的算法,有效地估计并修正无人机飞行过程中的位置和速度误差,明显提高导航精度和可靠性,可作为一种比较理想的无人机导航系统。
参考文献:
[1]秦博,王蕾.无人机发展综述[J].飞航导弹,2002,8(4):21-24.
[2]强岁红.我国无人机发展之思考[J].航空科学技术,2005,8(12):3-5.
[3]甄云卉,路平.无人机相关技术及发展趋势[J].兵工自动化,2009,28(1):14-16.
[4]白宏阳,陈帅,薛晓中.飞机SINS/多普勒/气压高度表组合导航性能分析[J].南京理工大学学报(自然科学版),2009,33(5):581-585.
[5]董绪荣,张守信,华仲春.GPS/INS组合导航定位及其应用[M].长沙:国防科技大学出版社,1998.
[6]江晓林.GPS/SINS组合导航工程实现及应用研究[D].南京:南京航空航天大学,2000.
[责任编辑:张德福]
DOI:10.19349/j.cnki.issn1006-7949.2016.10.004
收稿日期:2015-06-12
作者简介:王磊(1983-),男,助理工程师.
中图分类号:F291.1
文献标识码:A
文章编号:1006-7949(2016)10-0017-03
Modelling and simulation of SINS/GPS intergrated navigation system for UAV
WANG Lei,SHI Fengfeng,KOU Kaiyang,ZHANG Zhao
(BeijingSatelliteNavigationCenter,Beijing100094,China)
Abstract:According to the flight characteristic of UAV and the advantages and disadvantages of SINS and GPS,the trajectory generator is used to design the flight trajectory of UAV,and a UAV navigation system based on the SINS/GPS integrated navigation is set up.The theory of Kalman filter is adopted in the relative calculation and simulation of the system.The result of simulation can verify the reliability of SINS/GPS integrated navigation for UAV.
Key words:UAV;flight trajectory;SINS/GPS integrated navigation;Kalman filter
