搅拌车行驶稳定性的研究
2016-07-26魏静姿唐山工业职业技术学院河北唐山063299
魏静姿,刘 静(唐山工业职业技术学院,河北 唐山 063299)
搅拌车行驶稳定性的研究
魏静姿,刘 静
(唐山工业职业技术学院,河北 唐山 063299)
摘 要:混凝土搅拌运输车行驶稳定性一直是其亟待解决的问题之一。本文从重心位置变化、转弯速度及拌筒工况三个方面对搅拌车行驶稳定性影响做了较为详细的论述,提出了提高搅拌车行驶稳定性的具体措施,这对于搅拌车安全行驶具有重要意义。
关键词:混凝土搅拌运输车 ;行驶稳定性 ;失稳角
0 引言
混凝土搅拌运输车是一种用于长距离输送混凝土的机械设备。它是在载重汽车或专用运载底盘上安装一种独特的混凝土搅拌装置,兼有运载和搅拌混凝土的双重功能,可以在运送混凝土的同时对其进行搅拌或搅动,以保证混凝土通过长途运输后,扔不致产生离析现象。
混凝土搅拌运输车在建筑行业应用广泛,结构日趋合理,但在使用过程中,扔存在着许多要解决的问题,行驶稳定性就是其中之一。由于混凝土搅拌运输车罐体是以17°倾角布置,如图1所示,因此重心位置较高,且搅拌罐边行驶边搅拌(从车尾看,绝大多数搅拌罐为顺时针转动),罐体内拌合料的流动就会造成重心位置周期性变化,这些就导致搅拌车在行驶稳定性上比其它工程车辆差,特别是在转弯时,必须严格控制其转弯速度,否则很容易造成事故。因此,研究搅拌车行驶的稳定性有重要意义。

图1 混凝土搅拌运输车简图
1 影响搅拌车行驶稳定性因素
1.1 重心位置变化对行驶稳定性的影响
工程车辆一般用失稳角来衡量行驶稳定性。失稳角为车辆产生失稳时的临界坡度角。车辆倾翻一般为横向倾翻,即指车辆绕前后轮触地点连线向左或向右倾翻。为便于分析,将车架简化成如图2所示的机械运动简图。

图2 机械运动简图
设A、B、C、D为四个车轮的触地点,P为整车的重心。将车放在坡角为β的路面上,搅拌车的倾翻边为BC, PBC平面与地面垂直平面之间的夹角用β1表示,如图3-a所示。由于搅拌车边行走边搅拌,重心P点呈周期性变化,从而使β1为一变值,当重心P处于如图3-b所示位置时,β1最小。随着坡角β的逐渐增大,当PBC所构成的平面与水平面垂直时,搅拌车处于临界倾翻状态,PBC平面为临界倾翻平面,有β1=β,此时β1为失稳角,如图3-c所示。

图3 搅拌车失稳角
如以B为圆心, BA为X轴,BC为Y轴,将P点放在空间直角坐标系中,设P点坐标为(a,b,c),如图4所示。
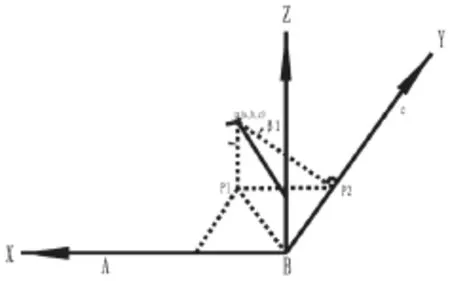
图4 搅拌车失稳角计算
过P作PP1⊥CBA平面且交于P1点,作PP2⊥Y轴且交Y轴于P2点,则<P1PP2=β1为失稳角。显然tgβ1=a/c (1)
(1)式中,a为重心离倾翻边的距离,c为重心高度。
由(1)式可知,失稳角仅取决于重心位置,与重心离倾翻边的距离成正比,与重心高度成反比。
对于每辆搅拌车,其满载时失稳角是一固定值,因此搅拌车应在小于失稳角的坡道上行驶才安全。失稳角越大,稳定性越好。
另外,由于车体重心的左右颤动,或多或少通过操纵系统可传递到方向盘上,使司机难以准确掌握转弯角度和速度,易造成事故。
由(1)式可知,失稳角与重心离倾翻边距离成正比,在转弯时,由于车体向弯道内侧倾斜,使车体绕倾翻边BC转过一个△θ角,从而使重心P相应向BC边移动了一个△a,则此时P点坐标变为P‘(a-△a,b,c+△c),则tgβ1‘= (a-△a)/( c+△c),显然β1‘<β1,因此转弯时,由于重心的改变,使稳定性下降。
投产运行后,随着生产过程控制的复杂化,该公司建设了生产管理控制中心(PMCC),各个联合控制室中的生产数据通过单膜光缆传输到PMCC,用于实现生产调度对生产过程中重要参数的实时监视,统筹全公司的生产管理。控制系统网络由单纯的二层结构变为控制网、管理网和高级应用网3层结构,工业控制系统网络结构如图2所示。该情况下的控制系统从各个独立的控制网络,连接成一个大的工业控制网络,但该控制网络还相对独立,没有连入互联网。
1.2 转弯速度对稳定性影响
车辆在转弯时,可产生瞬时动态离心力,造成倾翻力矩在瞬时大于稳定力矩。设车质量为M,转向前速度为V0,转弯半径为R0,离心力T0,在时间△t内,方向盘由R0变为Rt,由此可求出△t时间后的车速Vt及相应的离心力Tt为:


设车在切线方向受到的阻力为F,则F产生的加速度为a=-F/M (4)
在(2),(3)式中引入时间和变化率的概念,则在△t时间内转弯半径R和车速V的平均变化率为:

将(5)、(6)式代入(2)式,经整理得:

由于一般转弯多为R由大变小,故(△R/△t)<0,代入上式为:

可见,转弯速度增大,转弯半径变化率增大,离心力将急剧增大。由(7)可看出,速度变化率与半径变化率成正比。
因此,转弯速度越大,转弯速度变化率越大,车行驶稳定性越差。

(9)式 中,R为转弯半径,B4为有效稳定幅,B为重车平地静止的稳定幅,e为重心的总偏移值,g为重力加速度, 取g=9.8m.s-2,H为车辆重心离地高度。安全行驶速度V=70% V
1.3 拌筒工况对稳定性的影响
拌筒工况分为转向一致或相反两种情况。所谓转向一致,是指当重心移到最靠近倾翻边一侧的位置m点时的瞬时速度方向向下即右转弯,反之称为转向相反,如图5所示。当拌筒与输送车转向一致时稳定性最差,这是因为拌合料重心在运动过程中的惯性力对倾翻边产生了瞬时动态倾翻力矩,使稳定性大大减弱。同理,当转向相反时拌合料重心在运动过程中的惯性力对倾翻边产生了瞬时动态稳定力矩,因此其稳定性比拌筒固定时还要好。所以车在行驶过程中,左右转弯速度不应相同,即左转弯可适当快一些,右转弯时必须慢速。
现以五十铃汽车底盘搅拌车为例,重车平地静止的稳定幅B=1235mm,转弯半径R取1.5m,车辆重心离地高度H=2200mm[4],搅拌罐顺时针转动(从车尾看)左转弯时e=318mm,则有效稳定幅B4=1235-e=1235-318=917mm=0.917m, 将B4值代入式(9)得:Vf=7.82m.s-1=28.2km.h-1,安全车速V=70% Vf=19.8km.h-1。
右转弯时e=342mm,则有效稳定幅B4=1235-e=1235-342=893mm=0.893m,将B4值代入式(9)得:Vf=7.72m.s-1=27.8km.h-1,安全车速V=70% Vf=19.4km.h-1。
此外,影响车的稳定性还有其他一些因素。如路面质量,车体颠簸造成的振动等[5] [6],这里不作详述。
2 结论
1.对搅拌车用失稳角来表示其行驶稳定性,能确切的刻画其稳定性程度。
2.由于转弯使重心改变,从而使稳定性降低。
由于重心位置随时间变化,由此产生的惯性力或多或少的传递到方向盘上,难以准确掌握转弯角度和速度,从而使稳定性降低。
3.车辆在转弯时能产生离心力,离心力的大小与速度和半径变化率成正比关系,速度越大,半径变化率越大,离心力越大,车行驶稳定性越差。
4.车在转弯时,拌筒的转动方向和速度对其稳定性影响较大,搅拌车在左、右转弯时速度应有所不同。
参考文献
[1]贺劲, 周润伽, 帅国菊.论混凝土搅拌运输车的行驶速度限制[J].建筑机械,2003(07):36-38.
[2]刘凯, 张志军.砼运输车转弯临界侧翻速度研究[J].公路与汽运, 2013(6):20-23.
[3]胡素云, 王窈惠, 宋友发.混凝土搅拌运输车行驶稳定性分析[J].筑路机械与施工机械化, 2010(11): 78-81.
[4]刘丽华, 杨建军.混凝土机械日常使用与维护[M].北京:机械工业出版社, 2010:45-46.
[5]陈志军, 罗永前.一种混凝土运输车横向行驶稳定性研究[J].重庆电子工程职业学院学报,2009(4):98-100.
[6]倪菲菲.混凝土搅拌运输车侧翻预警技术的研究[D].重庆:重庆交通大学,2013(9):82-84.
中图分类号:TU642
文献标识码:B
文章编号:1674-943X(2016)02-0001-02
收稿日期:2016- 05- 10
作者简介:魏静姿(1966- ),女,河北唐山人,学士,教授,主研方向为机电工程。
On the Driving Stability of Mixers
WEI Jingzi, LIU Jing
(Tangshan Polytechnic College, Tangshan 063299, China)
Abstract:The driving stability of concrete mixing truck has been one of the problems need to be solved.In this paper, from the center of gravity position change, turning speed and working condition of mixing tube, three aspects of influence on the driving stability of the mixers made detailed.We put forward some specific measures to improve the driving stability of the mixers, which is of great significance for stirring the car safety.
Key words:concrete mixing truck; traveling stability; buckling angle
