Design of Double Variable Control System of Fertilization
2016-07-25CHUShizheZHANGLixinLIZhenLIKaiMachineryandElectricityEngineeringCollegeShiheziUniversityShihezi832003China
CHU Shi-zhe,ZHANG Li-xin,LI Zhen,LI Kai(Machinery and Electricity Engineering College,Shihezi University,Shihezi 832003,China)
Design of Double Variable Control System of Fertilization
CHU Shi-zhe,ZHANG Li-xin※,LI Zhen,LI Kai
(Machinery and Electricity Engineering College,Shihezi University,Shihezi 832003,China)
Abstract:Variable rate fertilizer control system isessential for the achievement ofvariable rate fertilization.Combined with the status quo and development trend of domestic and overseas fertilizing machine and corresponding control system,this paper presentsa control system of fertilization based on outer grooved wheel type fertilizer device,by adjusting the speed of the shaft and the fertilizer apparatusopening size to achieve double variable fertilization,to overcome problems of single variable fertilization,such aspoor precision,small scheduling,significant pulsation when low speed. Key words:Variable Fertilization;control system;singlechip;hydraulic system
0 引言
精准农业是现代农业发展的必然趋势,且已在我国取得了较为显著的经济效益与社会效益[1]。变量施肥是精准农业重点研究领域之一。变量施肥技术是以不同空间单元的目标产量与土壤理化性质等为依据进行综合测算分析,结合营养专家系统、作物生长模型进行施肥量决策,指导变量施肥机进行田间按需施肥[2-3,5]。实践证明,实施按需变量施肥可大幅提高肥料的利用率、减少肥料的浪费以及多余肥料对环境的不良影响,其经济、社会和生态效益显著[4-5]。而变量施肥机是变量施肥技术的基础和载体,同时变量施肥机的排肥控制系统又是变量施肥系统的重要组成部分,是实现精准变量施肥的关键。
目前施肥机实现变量施肥主要有两种控制方式:一种是基于传感器的实时控制;另一种是基于施
针对以上问题,结合国内外变量施肥机及相应控制系统现状与发展趋势,本文提出了一种基于外槽轮式排肥器的双变量施肥闭环控制系统,主要包括基于工控机的上位控制系统、基于STC单片机的下位控制系统及电控液压系统,其整体结构框图如图1所示。
1 基于工控机的上位控制系统设计
基于工控机(IPC)的上位控制系统是施肥决策的主控制系统,上位工控机可以提供高效的数据运算和良好的人机交互界面(HMI)。上位控制系统具体工作原理与过程如下:首先通过施肥机排肥标定试验得到不同的标定函数模型,写入到软件控制程序中,在自动模式下,系统通过RS232串口总线将GPS/ DGPS接收机发送的信号读入写到决策系统进行分析处理,同时提取出施肥机具经、纬度位置信息,然后再通过网格识别程序,计算得到机具所在地块网格的行列号,然后查询数据库中对应于该网格的决策施肥量Q。
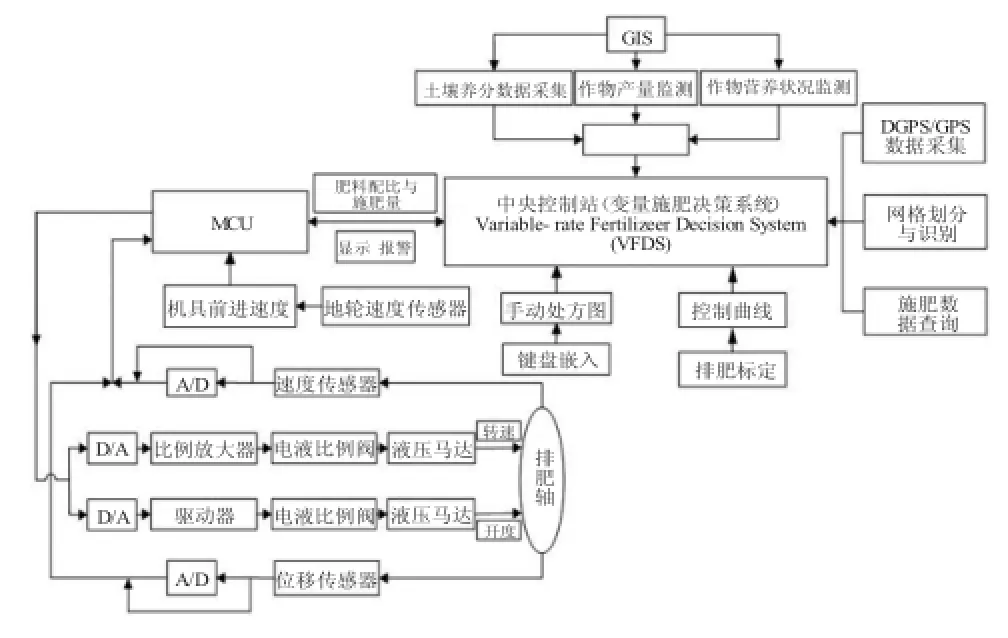
图1 施肥控制系统的整体结构框图
在手动模式下,通过键盘录入整块田地总施肥量,并读取下位控制器对安装于车轮上的霍尔传感器所采集到的脉冲信号计算到的机具前进速度值。施肥机具经纬度位置、速度、行列号和施肥量等信息将显示在人机界面中。通过标定施肥公式计算所需液压马达的转速N和排肥轴的开度,并将该转速转化为驱动器所需的电压(电流)信号驱动转速液压马达转动,调节排肥轴转速和排肥器槽轮的有效工作长度(即排肥器开度),再由霍尔传感器检测当前排肥轴转速反馈给控制器,实现闭环控制。在此过程中,排肥器开度由控制器发出信号驱动开度液压马达转动带动排肥轴轴向位移来实现。控制系统通过对排肥轴转速及排肥器开度的控制实现双变量施肥。
2 基于单片机的下位控制系统设计
下位施肥控制系统以宏晶科技STC12C5A60S系列单片机为核心,利用DA转换将上位机给定的施肥量信息转化为电液比例调速阀和开度电磁阀所需的电压控制信号,其主要任务是实现排肥轴转速和开度的数据采集及传输,控制排肥轴电液比例调速阀的开度阀值(转速控制),控制排肥轴开度电磁阀开闭(开度控制),与基于串口总线的测试系统以及与工控机上位机系统进行通信。排肥轴转速的采集与机具行驶速度的测量采用的是基于PCA转速测控模块。利用PCA脉冲捕获的高速度和高可靠性,实时将排肥轴转速和拖拉机的行驶速度等信息通过串口总线发给基于工控机的上位机主控系统,实现闭环施肥控制。
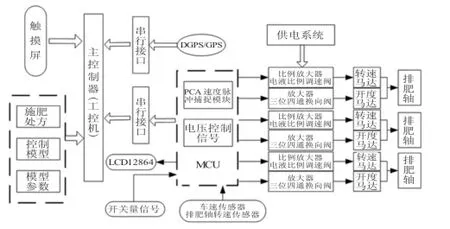
图2 上位控制系统结构框图
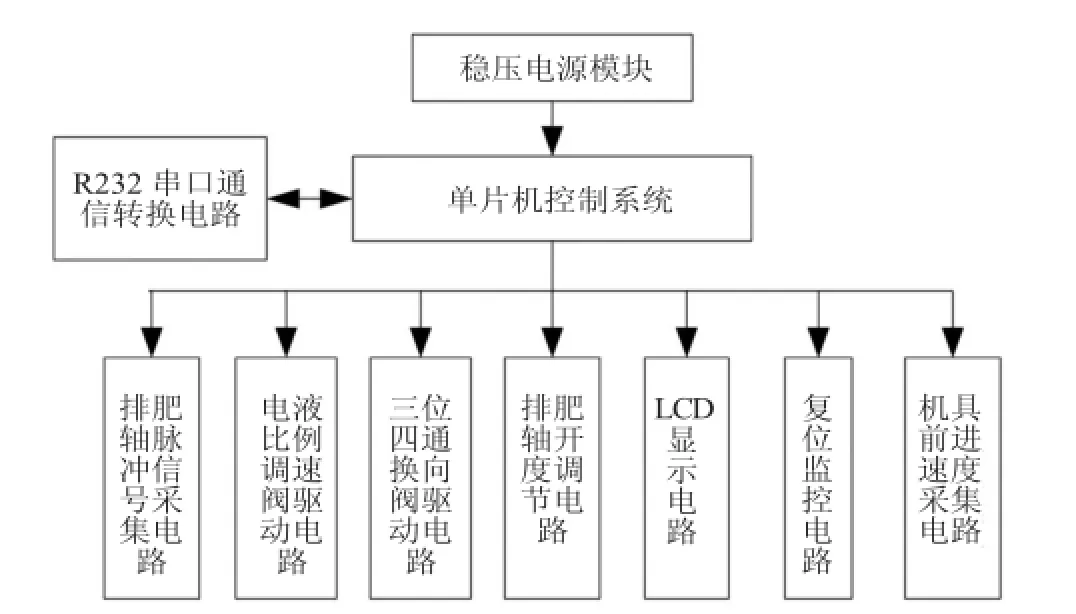
图3 下位闭环控制系统硬件电路组成框图
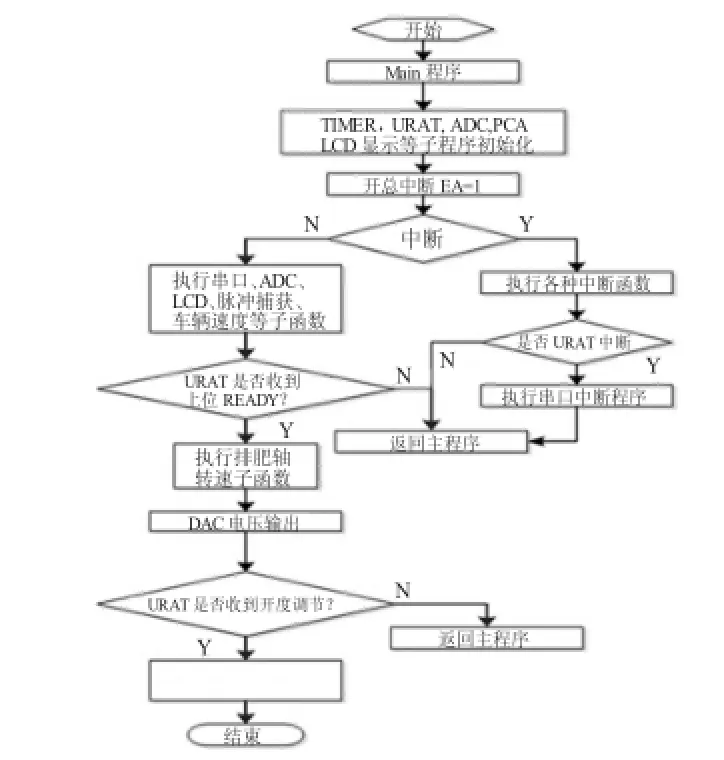
图4 下位控制系统流程图
3 双变量施肥机电控液压系统的设计
根据变量施肥机的排肥方式及其施肥精度要求,施肥电控液压系统通过控制安装在施肥机排肥轴两侧的液压马达分别驱动排肥轴进行转动和轴向位移,以此来实现排肥轴的转速与排肥器开度双调节。排肥转速马达采用电液比例调速阀进行排肥轴转速的无极调速,开度马达采用三位四通电磁换向阀与溢流阀组合进行正反转换向调节实现排肥器开度控制。排肥轴转速控制和排肥器开度控制相互独立,互不干涉。
液压系统油路图如图5所示,主要工作流程如下:拖拉机为整个控制系统提供直流稳压电源和液压油源,首先调整先导式溢流阀的工作压力,压力油在进入电液比例调速阀之前,两位两通电磁阀1号和2号电磁铁通电,得到两个不同的稳定工作压力。下位控制器根据接收到的控制指令,使O型三位四通电磁换向阀4中的两端电磁铁一端得电,在两个不同的稳定工作油压下,开度马达获得不同的转动速度,当其转速保持在8 r/min时实现慢速调整外槽轮排肥器槽轮的有效工作长度,在30 r/min时进行快速高档调速。
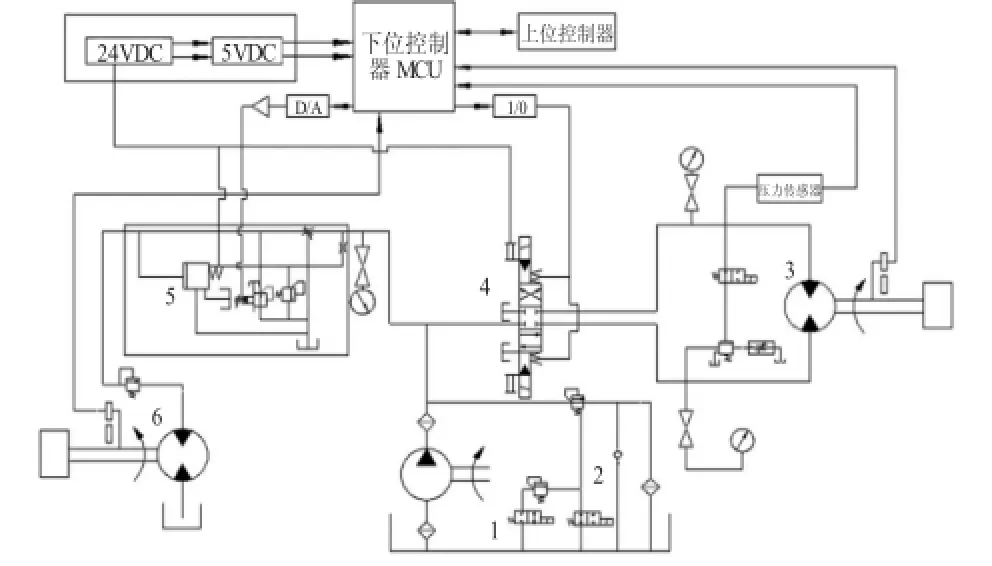
图5 变量施肥电控液压系统图
下位控制器控制电液比例调速组合阀3中驱动器端电磁铁的工作电压,对排肥转速马达进行转速调节。在整个调速系统中关键油路部位安装压力表,时刻监测工作油路油压的稳定性,以避免因油路不稳定造成施肥精度下降,造成施肥误差的积累。安装于每个排肥轴的霍尔传感器将采集到的排肥轴马达转速和槽轮工作位移实时信号传输给下位控制器,同时下位控制器将施肥机排肥轴的转速信息发送给上位机进行数据处理分析,然后进入下次施肥调节。
4 系统设计结果
该控制系统设计较好地实现了双变量施肥系统的运动控制、检测控制及施肥机具工作状态的监控,基本实现了系统设计所期待的成果。目前,该系统正处于样机的评价和改进阶段,相关的图片如图6。
5 总结
本文在综合考虑国内外变量施肥机具以及施肥控制系统现状与发展趋势的基础上,设计了一个基于上位工控机下位单片机的电控液压传动双变量施肥机闭环施肥控制系统。通过对双变量施肥机施肥控制系统设计的讨论,为同类型的变量施肥机控制系统设计提供了一种设计思路,具有一定的参考价值。
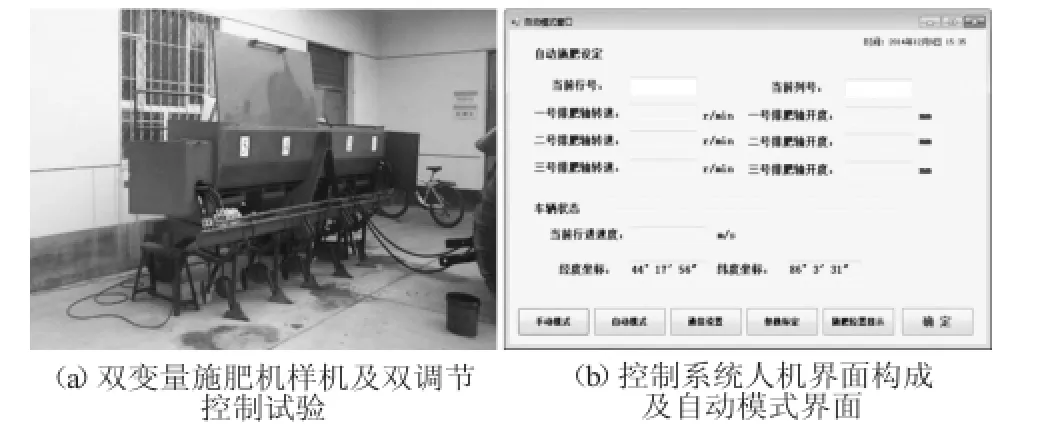
图6 系统设计结果
参考文献:
[1]刘爱民,封志明,徐丽明.现代精准农业及我国精准农业的发展方向[J].中国农业大学学报,2000(02):20~25.
[2]张辉,李树君,张小超,王志,王伟平.变量施肥电液比例控制系统的设计与实现[J].农业工程学报,2010,S2:218~222.
[3]刘阳春,张小超,伟利国,李福超,李卓立.一种变量施肥技术的实现及其台架试验[J].农业机械学报,2010(09):159~162.
[4]伟利国,张小超,苑严伟,刘阳春,李卓立.2F-6-BP1型变量配肥施肥机的研制与试验[J].农业工程学报,2012(07):14~18.
[5]张春凤.液态变量施肥机关键部件的设计与分析[A].中国农业机械学会.2012中国农业机械学会国际学术年会论文集[C].中国农业机械学会,2012:4.
[6]马旭,马成林,桑国旗,庄俭.变量施肥机具的设计[J].农业机械学报,2005(01):50~53.
[7]段洁利,李君,卢玉华.变量施肥机械研究现状与发展对策[J].农机化研究,2011(05):245~248.
[8]赵登峰,张立新,范子胜.变量施肥装备的研究现状及展望[J].新疆农机化,2011(04):29~33.
[9]吴金林,张立新,喻俊志,王卫兵,张家华.双变量施肥液压调速系统的设计及仿真[J].机床与液压,2014(05):80~84+107.
[10]古玉雪,苑进,刘成良.基于模糊系统的开度转速双变量施肥控制序列生成方法[J].农业工程学报,2011(11):134~139.
doi:10.13620/j.cnki.issn1007-7782.2016.01.006
中图分类号:S224.22
文献标识码:A
文章编号:1007-7782(2016)01-0018-03
收稿日期:2016-02-13
基金项目:国家自然 项目(51365048)
通讯作者:张立新肥处方的控制[6]。由于相关传感器检测等技术应用于作物施肥检测尚不成熟,目前绝大多数自动变量施肥机采用基于施肥处方的变量施肥控制系统[7]。在变量施肥实现方式上,国内外在电控机械无级变速系统、电控步进电机型调速系统方而的研究较为深入,相关机型有约翰迪尔JD-1820/1910气吸式变量施肥播种机,CASE公司研发的2340空气施肥机和国家农业信息化工程技术研究中心研制的1G-VRT1旋耕变量施肥机和2F-VRT1变量施肥机等[8~9]。然而,现有控制系统大多仅局限于对施肥机排肥轴转速进行控制,即单变量施肥,同时由于我国施肥机多采用外槽轮式排肥器,相对于双变量施肥存在精度差、可调度小,在低速排肥时脉动性显著等问题[10]。