转向盘转角传感器零点标定工具的开发
2016-07-25张晶峰张卫兵郑志明东风汽车股份有限公司商品研发院湖北武汉430057
黎 新,张晶峰,张卫兵,刘 宁,郑志明,汪 斌(东风汽车股份有限公司商品研发院,湖北 武汉 430057)
转向盘转角传感器零点标定工具的开发
黎新,张晶峰,张卫兵,刘宁,郑志明,汪斌
(东风汽车股份有限公司商品研发院,湖北 武汉430057)
摘要:简介动力转向系统改型设计、转向盘转角传感器基本原理。详细介绍转向盘转角传感器零点标定工具的开发过程,包括软硬件方案选择、自定义通信协议、上位机程序原理及试验验证。
关键词:动力转向系统;转角传感器;零点标定;USBCAN适配器
东风御风商务车是东风汽车股份有限公司设计制造的一款柴油动力MPV,我司以该车型为基础开发了一款代号EA08的纯电动MPV。由于这两款车动力系统不同,导致动力转向系统需重新开发;并且由于这两款车使用同一条生产线完成总装工艺,所以生产线也需要调整。
1 动力转向系统改型设计
原车型动力转向系统为液压助力,主要由转向泵、油管 (包括压力油管、回油管、吸油管等)、动力转向器和油罐组成[1]。转向泵由发动机驱动,新车型取消了发动机,因此无法沿用原车型的转向泵。为了尽可能地少改动转向系统,我们采用了一种结构紧凑的电动转向泵(图1)。这种转向泵将泵本体及其驱动电机集成为一体,并且驱动电机为直流无刷电机,所以必须附加电子换相电路。

图1 电动转向泵
还有两点需要注意:①助力大小应随转向盘转速和车速变化,驾驶员打转向盘速度越快,期望助力越大,车速越低助力越大;②转向盘打死时,如不降低电机转速,则极易使转向泵过载损坏。也就是说这种转向泵除了需要电子换相以外,还需要一个控制装置根据车速、转向盘角速度和角度来控制泵的转速,因此把换相电路和控制装置整合做成一个转向泵控制器。这两个功能需要转向盘的角速度和角度两个信号(当然还需要车速信号,由于车速信号非常容易获得,本文不再赘述),由于角速度可通过角度对时间微分得到,因此只需要在转向盘下方的转向管柱上安装一个转向盘转角传感器即可。
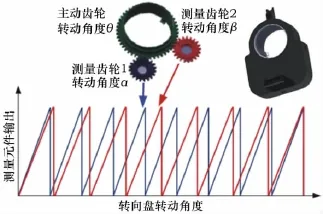
图2 转向盘转角传感器
图2所示的转向盘转角传感器内部构造,主要由
一般认为,转向盘处于回正位置时对应的转角为零度,转向泵控制器也是按这个约定工作的,所以必须保证此时传感器输出的CAN报文对应的转角为零度,否则将导致转向泵控制器误判转向盘位置 (极端情况下,将回正位置误认为打死位置),从而不能正常工作。也就是说,在生产线上装配转向盘转角传感器时,必须对其进行调零校准操作才能投入使用。
2 转向盘转角传感器零点标定
调零校准方法有如下两种:①调整传感器的安装位置,直到其输出的转角信号为零度为止;②通过标定使转向盘转角传感器输出的转角信号为零度。
第①种方法对装配精度要求较高,要反复调整,费时费力;第②种方法无须调整传感器的安装位置,装配简单,生产效率高。因此我们采用第②种方法,通过标定转向盘转角传感器的绝对零度位置来实现调零校准 (以下简称标零)。具体步骤如下。
1)转向盘回正,此时传感器输出的转角为X度。
2)向传感器发送一帧特定的CAN报文,请求标零。
3)传感器收到该报文,将X保存到EEPROM存储器中,并将转角信号减去X修正后再输出。
4)发送一帧应答报文,表示标零已完成。
自定义标零通信协议定义如表1、表2、表3所示。表1是标零工具发送给转向盘转角传感器的请求报文,表2和表3是转向盘转角传感器发送给标零工具的应答报文,表2是标零成功应答,表3是标零失败应答。

表1 请求标零报文格式

表2 转向盘转角传感器应答报文格式 (标零成功)

表3 转向盘转角传感器应答报文格式 (标零失败)
3 零点标定工具的开发
由于电动车与柴油车共用一条传统车的总装线实施装配作业,而总装线上并没有标零工序和标零工具,所以必须对生产线进行改造才能应用上述标零方法。标零工具本质上就是一个能够收发CAN报文的装置,以下两种方案均可:①用单片机、CAN通信芯片设计专用嵌入式系统,编写固件代码;②用PC机外接USBCAN适配器搭建硬件系统,编写上位机程序。
方案①不仅要自行编程,而且还要自行设计、调试硬件电路;方案②中的PC机和USBCAN适配器均为通用设备,无须自行设计硬件。我司总装线一角如图3所示,这是总装线的最后一个工位,该工序扫描条形码将车辆信息录入数据库。这个工位配备工控计算机,非常适合用作标零上位机。考虑到这些因素,我们采用方案②开发标零工具。

图3 总装线一角
3.1上位机程序设计
周立功USBCAN适配器提供了大量接口函数供用户二次开发[3],Visual Basic 6.0是微软推出的一种可视化的、基于对象的高级编程语言,所以我们选择Visual Basic 6.0调用周立功USBCAN适配器接口函数编制标零上位机程序。
为了便于总装线上工人操作,程序界面非常简洁、直观,如图4所示,所有参数都已填好默认值,无须编辑修改。程序用到的重要数据结构有VCI_INIT_CONFIG结构体和VCI_CAN_OBJ结构体。VCI_INIT_CONFIG用于保存USBCAN初始化参数,如波特率、验收码、屏蔽码、滤波方式、工作模式等,配置好之后调VCI_InitCAN接口函数,将参数写入USBCAN设备。VCI_CAN_OBJ结构体代表了一帧CAN报文,填充该结构体,调VCI_Transmit接口函数即可发送一帧报文,VCI_Receive接口函数负责将USBCAN设备收到的CAN报文填充到该结构体中。
程序关键代码有两处,分别是 “标零”按钮单击事件处理代码和定时器回调函数,用于发送标零请求报文和接收应答报文判断标零是否成功,流程如图5、图6所示。

图4 标零上位机程序界面

图5 标零请求发送流程
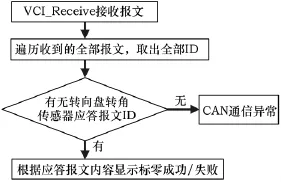
图6 判断标零是否成功的流程
3.2标零工具验证
在图3所示的工控机上安装周立功USBCAN适配器驱动程序和标零上位机程序,将适配器一端通过USB与工控机连接,一端通过OBD与待下线车辆的诊断口连接。单击 “标零”按钮,工控机立即发送一帧标零请求报文给车上的转向盘转角传感器,随后收到其应答报文,上位机程序界面点亮绿灯,显示标零成功(图4)。车辆下线试驾,转向非常轻盈、灵活自如,说明动力转向系统工作正常,传感器标零成功。迄今为止,已有上千台纯电动汽车使用该工具完成标零工序,效果非常好,充分表明了标零工具开发是成功的。
4 结束语
我司动力转向系统设计方案选型,对于传统车一般采用机械式液压助力,对于电动车一般采用电机助力,而EA08纯电动车首次采用了传统车通常不会配置的电动液压助力转向系统,导致传统车装配车间无法完成EA08特有的转向盘转角传感器标零工序。我们充分利用车间现有工控计算机和成熟的USBCAN适配器,自行开发上位机程序解决了这个问题。
参考文献:
[1]王霄峰.汽车底盘设计[M].北京:清华大学出版社,2010:351.
[2]王俊,杨胜兵,过学迅.汽车转向盘转角传感器系统设计及算法研究[J].湖北汽车工业学院学报,2011,25 (1):19-21.
[3]周立功.USBCAN适配器CAN-bus通用测试软件及接口函数库使用手册2.0[Z].
(编辑文珍)
中图分类号:U463.85
文献标识码:A
文章编号:1003-8639(2016)01-0030-03
收稿日期:2015-06-30;修回日期:2015-07-14
作者简介:黎新 (1979-),男,湖北通城人,车辆工程博士,从事计算机软件和汽车电控软件开发,主要研究方向为电动汽车电控系统,lixin_ustb@163.com。一个大主动齿轮和两个齿数不等的小从动齿轮、磁钢、霍尔元件、单片机、CAN模块组成。大齿轮随转向管柱一起转动,带动小齿轮和磁钢旋转,利用霍尔效应可以检测到两个频率不同 (因为两个小齿轮齿数不等)的电压信号。单片机先对电压信号进行模数转换,然后通过计算得到转向盘的绝对转角,并通过CAN模块发送给转向泵控制器,具体工作原理请参考文献[2]。
Development of Zero Calibration Tool for Steering Wheel Angle Sensor
LI Xin,ZHANG Jing-feng,ZHANG Wei-bing,LIU Ning,ZHENG Zhi-ming,WANG Bin
(Commodity Research and Development Institute,Dongfeng Automobile Co.,Ltd.,Wuhan 430057,China)
Abstract:The remodel design of power steering system and the basic principle of steering wheel angle sensor are briefly introduced.The development process of zero calibration tool for steering wheel angle sensor is introduced in details,including the selection of software and hardware,self-defined communication protocol,PC programming principle and test verification.
Key words:power steering system;angle sensor;zero calibration;USBCAN adapter
