一种0.4 m机载平板动中通天线的设计
2016-07-23张瑞东牛传峰
张瑞东,牛传峰
(中国电子科技集团公司第54研究所 天线伺服专业部,河北 石家庄 050081)
一种0.4 m机载平板动中通天线的设计
张瑞东,牛传峰
(中国电子科技集团公司第54研究所 天线伺服专业部,河北 石家庄 050081)
摘要传统抛物面天线剖面高,而高速运动中的飞机需要具有低剖面特性的天线以减小其风阻。文中设计了一种Ku频段平板动中通天线,具有装机高度低、风阻小、性能优的特点。该天线阵列设计为3.5:1的长方形结构,大幅降低了高度。天线阵列采用高效率辐射单元,天线单元通过低损耗的带状线与波导结合形式馈电进行组阵。方位跟踪采用相控电子波束扫描技术,俯仰采用程序引导跟踪技术。测试结果表明,天线高度不超过280 mm,天线增益优于33 dB,跟踪精度误差控制在0.5 dB以内。
关键词动中通;低剖面;Ku波段;双极化;平板天线
Ku频段机载卫星通信具备通信容量大、机动灵活、覆盖面积大等优势,因而备受关注[1]。卫星通信应用领域不断扩展,真正实现了全球通信无缝隙覆盖[2]。飞机运动中要实现宽带卫星通信,这对天线提出了更高的要求,需要天线在各种恶劣情况下波束始终指向卫星,使整个通信链路保持畅通[3-4]。机载动中通天线的关键技术是通过使用最小口径的天线,实现最优的天线性能,从而实现通信系统最大的信息速率的传输[5-6],而天线结构的小型化也是对飞机机体符合美学和运动学等提出的更高要求[7-8]。传统反射面天线体积大,剖面高,因而风阻大且机动性差[9-12];相控阵天线成本较高,还不能被普遍使用[13-14],因此均不是最佳选择。
本文设计了一种等效天线口径0.4m的Ku波段平板阵列动中通天线,剖面低且结构紧凑、电气性能优良、伺服跟踪稳定可靠,能够较好满足机载天线的实际使用需求。
1天线整体设计
机载动中通天线系统由平板阵列天线、天线座架部分、伺服控制部分等组成。
平板阵列天线接收和发射射频信号,该部分是机载天线的关键;天线座主要作用是为天线提供支撑并完成方位、俯仰运动;伺服部分主要作用是接收和处理来自导航部分及接收机部分的信号,进行天线的自动跟踪控制,使天线始终对准卫星。
动中通天线系统组成框图如图1所示。天线系统的工作过程如下:系统加电后,根据导航组件提供的卫星经度参数、机体定位和姿态信息,伺服控制部分引导天线指向卫星,完成天线对卫星的初始捕获。天线进而转入跟踪状态,始终保持对准卫星状态。天线阵列接收到的卫星下行信号通过下变频器转换成中频信号,通过同轴射频关节提供给通信终端设备;来自射频功放的上行Ku波段信号,经Ku波导关节送入平板天线阵列,然后通过天线辐射出去。

图1 机载动中通天线系统框图
2天线阵列与伺服设计及仿真
天线单元采用方形波导谐振腔的形式,通过两个正交耦合探针进行激励从而形成两个正交极化信号并辐射出去。天线口面采用收发共用的双极化阵列形式以充分利用天线口径。在同一辐射口面内,实现水平、垂直双线两种极化波同时覆盖接收和发射频段。如图2所示,天线分为两个子阵,天线子阵内部采用损耗低、屏蔽效果好的空气带状线进行馈电[15],每个子阵的两个极化信号通过波导带线转换变成两个标准BJ140接口;天线子阵接口之间通过波导连接,这样可以充分利用波导插损小的优势以提高天线整体效率。

图2 天线子阵及接口分布示意图
天线子阵通过双工器分离出接收信号,其垂直极化、水平极化信号分别通过低噪声放大器放大,进入接收极化调整模块,通过数控移相器和数控衰减器调整水平极化信号和垂直极化信号之间的幅度和相位,然后通过合路器合成输出,实现接收信号极化调整。最后通过二合一波束形成网络进行信号输出。
从双工器分离出来的发射两路极化信号通过波导合成后进入专门设计的发射极化调整装置。该装置通过调整两路正交极化信号的相位,从而实现任意极化信号达到与卫星的极化匹配目的。
通过将天线阵列与双工器直接贴合,低噪声放大器与双工器直接贴合,最大限度减小接收信号损耗,提高了G/T值;通过将功放置于天线座架上,减少了波导走线,有效提高天线的等效发射功率,提高了天线发射性能。天线阵列工作原理框图如图3所示。
通过使用ANSYSHFSS高频结构仿真软件对天线进行建模仿真。整个天线阵列模型如图4所示。通过对模型进行计算得到天线仿真方向图,如图5和图6所示。

图3 射频工作原理框图

图4 双极化天线阵列模型图

图5 天线发射频率仿真方向图
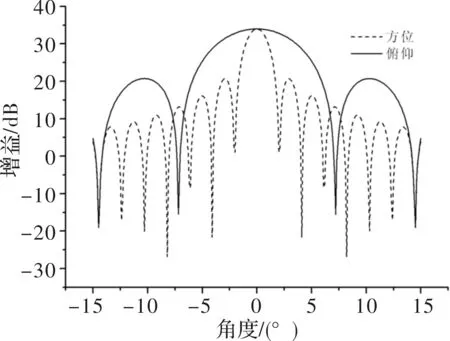
图6 天线接收频率仿真方向图
天线利用惯性导航设备提供机体的航向、纵横摇姿态信息,采用相控电子波束扫描跟踪(方位)和程序引导跟踪方式(俯仰)实现对卫星的自动跟踪。方位进行相控电子波束扫描跟踪的基本原理是:天线阵列分为两个子阵,两个子阵之间采用相控电子波束扫描,利用低成本的惯导和跟踪接收机实现天线快速捕星、自动跟踪。通过对天线子阵输出信号进行相位控制,即可形成一定角度的天线波束扫描,将扫描信号反馈给伺服系统即可进行快速进行跟踪。伺服控制系统由天线控制模块、伺服控制模块、极化控制模块、方位/俯仰驱动模块、跟踪模块等部分组成[16]。天线伺服控制组成框图如图7所示。
动中通天线捕获卫星信号过程如下:伺服控制系统根据机载导航设备提供的信息,包括飞机机体的地理经纬度、机体航向角、横/纵摇角和目标卫星的经度,实时计算出天线指向卫星的方位、俯仰地理角度,经过坐标变换,将指其转换成天线轴角,并将转换后的天线轴角作为目标角进行闭环控制,使天线对准卫星。当天线伺服控制单元捕获卫星后,转入自跟踪状态。在自跟踪状态,伺服控制单元根据接收机提供的跟踪信号进行天线方位、俯仰轴跟踪。

图7 天线伺服控制组成框图
按天线跟踪损失要求<0.8dB分析,那么允许方位、俯仰的跟踪损失约为0.56dB,天线方位、俯仰波束宽度约1.8°和6°,那么允许方位跟踪误差约为0.38°、俯仰跟踪误差约为1.29°。伺服采用典型Ⅱ型伺服系统,开环对数幅频特性具有-40dB/dec、-20dB/dec、-40dB/dec形式。典型Ⅱ型系统是加速度有滞后误差、速度无滞后误差的伺服系统。根据实际工作条件参数,采用数字调节器实现校正。
根据要求,天线的运动角加速度为80°/s2,从工程实现角度考虑,方位环路加速度增益做到270是可行的,那么方位跟踪误差≤0.38°,同理俯仰加速度误差≤1.29°,能够满足跟踪精度要求。
3实物测试结果
设计加工的低剖面阵列动中通天线照片如图8所示。天线外包络尺寸为≤Φ750mm×280mm。由图8可见,天线较传统抛物面可方便地调整长宽比,同等等效口径可以明显降低剖面高度,从而在减小风阻方面具有重要作用[17],更好地满足飞机运动学的要求。
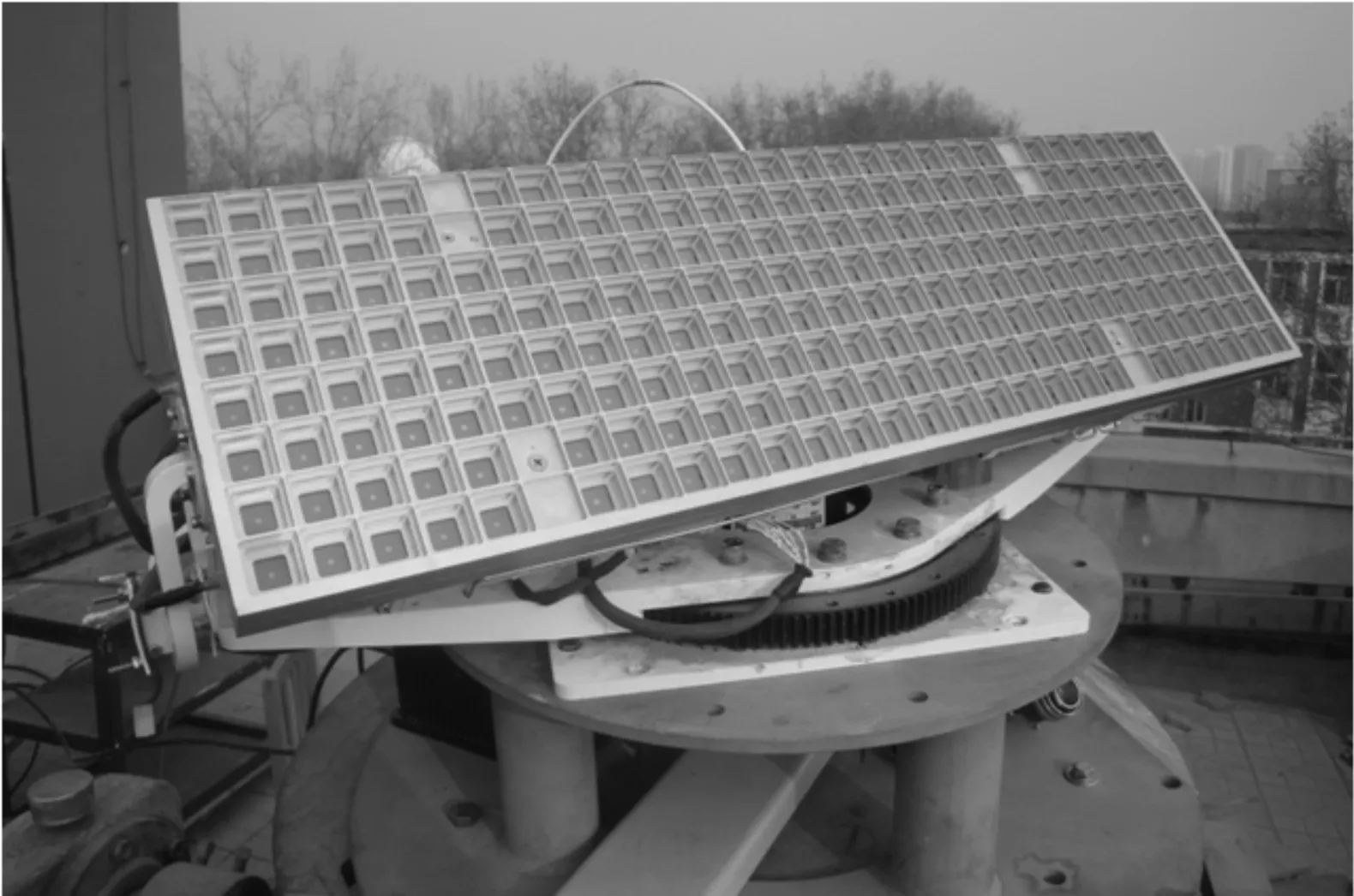
图8 低剖面阵列动中通天线
在专用天线开放测试场,使用远场法对天线的接收频率和发射频率进行方向图测试。图9为天线发射频率方向图,图10为天线接收频率方向图。由图9和图10读出的波束宽度为:在接收频段方位面、俯仰面的波束宽度分别为1.8°和6.3°;在发射频段方位面、俯仰面的波束宽度分别为1.6°和5.6°。俯仰面波束宽度和方位面波束宽度的比值接近3.5∶1,这与阵列天线在俯仰和方位方向的阵列规模、口径具有对应关系,即在方位俯仰上,阵列规模为28×8,口径尺寸比例为3.5∶1。这种方位窄、俯仰宽的赋形波束在实际应用方面有较大的优势:方位面的窄波束特性减小了卫星赤道方向上的邻星干扰;俯仰面的宽波束特性有助于更好地跟踪卫星,对减小天线的跟踪压力有较大帮助。另外,对比实际测试的天线方向图和仿真设计的方向图,二者基本一致。
通过专业的三轴摇摆台模拟飞机机体运动对设计的低剖面阵列动中通天线跟踪性能进行了跟踪测试,其中采样时间25s。在摇摆台模拟机体运动期间,通过计算机采集、记录接收信号电平的变化,并根据此数据计算出跟踪信号变化的均方根误差(静态接收最大信号电平为归一化值),以此考察天线在机体运动情况下的跟踪性能。

图9 发射频率方向图

图10 接收频率方向图
根据测试数据绘制了信号变化曲线如图11所示。由测试曲线可见,信号电平变化范围较小,跟踪性能良好,能够保证通信系统的通信可靠性。根据测试数据计算,天线跟踪精度的测试结果为0.38dB。

图11 天线跟踪电平曲线
4结束语
本文设计了一种小口径机载低剖面动中通天线,主要采用长方形平板天线,大幅降低了天线整体剖面高度,较好地解决了机体快速运动风阻大的难题。在较小的空间内,采用高效率的天线单元及低损耗馈线组阵,保证了天线整体电气性能。天线伺服控制采用的相控波束扫描跟踪方式,跟踪方式简单、可靠。天线实测结果表明,天线剖面低、电气性能良好、伺服跟踪简单可靠。该天线在机载卫通领域有较为广阔的应用前景。
参考文献
[1]艾文光,赵大勇,邓军.机载Ku、Ka频段卫星通信系统综述[J].电子科技,2011,24(10):138-140.
[2]侯庆香.卫星通信技术的新趋势[J].新媒体研究,2016,2(2):17-18.
[3]邹火儿,韩国栋.机载低剖面卫通天线的发展与未来[J].现代雷达,2014,36(3):53-55.
[4]魏英杰.“动中通”地面站卫星天线伺服控制系统[J].天线与伺服技术,2007,33(3):30-31.
[5]牛传峰,张瑞东,张德,等.车载低剖面阵列动中通天线设计[J].中国电子科学研究院学报,2013,8(4):413-415.
[6]郭嘉俭.动中通卫星通信系统中的天线问题[J].数字通信世界,2011(10):66-71.
[7]MartinShelley,RobertPearson.Lowprofile,dualpolarisedantennaforaeronauticalandlandmobilesatcom[J].AdvancedSatelliteMobileSystems,2008,8(4):16-19.
[8]StefanoVaccaro,FerdinandoTiezzi,DanielLlorens.Ku-bandlowprofileantennasformobilesatcom[J].AdvancedSatelliteMobileSystems,2008,8(4):24-28.
[9]项阳,施伟,杨华,等.Ku频段低剖面“动中通”卫星天线技术综述[J].军事通信技术,2014,35(3):34-36.
[10]高文生.机载卫星通信系统设计[J].卫星与网络,2014,10(9):60-67.
[11]LamAB.Wide-bandphotonicallyphasedarrayantennausingvectorsumphaseshiftingapproach[J].IEEETransactionsonAntennasandPropagation,2005,53(11):3589-3595.
[12]EhudG.Improveddesignofthevivaldiantenna[J].IEEEProceedings,1988,135(2):89-92.
[13]韩国栋,杜彪,陈如山.卫星移动通信相控阵天线研究现状与技术展望[J].无线电通信技术,2013,39(4):1-6.
[14]李琳,万继响.低轮廓动中通天线研究现状[J].空间电子技术,2015,22(3):43-50.
[15]宋长宏,吴群.一种双扼流槽双极化低旁瓣阵列天线[J].电波科学学报,2013,28(5):857-860.
[16]武伟良,刘晓丽.车载动中通伺服系统关键技术的研究[J].河北省科学院学报,2010,27(1):31-34.
[17]牛传峰,杜彪,韩国栋,等.低轮廓动中通天线[J].中国电子科学研究院学报, 2013, 8(2):149-155.
Design of a 0.4 m Plate Antenna of Satcom on the Move
ZHANGRuidong,NIUChuanfeng
(DepartmentofAntennaServo,The54thResearchInstituteofCETC,Shijiazhuang050081,China)
AbstractTraditional parabolic antenna has high profile, while high speed aircraft need low profile antenna to reduce the wind resistance. A kind of Ku band “Satcom on the Move” flat antenna is designed, which has the advantage of low profile, low wind resistance and good performance. The antenna array is designed to be a 3.5:1 ratio rectangle which can reduce antenna height. By using high efficiency radiation unit, the antenna array is connected with strip line and waveguide which have low insert loss. The phase controlled beam scanning technique is used for azimuth tracking and program tracking for elevation. The result shows that the antenna has a height of lower than 280mm, the antenna gain is better than 33dB, and then tracking accuracy is controlled in 0.5dB.
Keywordssatcom on the move; low profile; Ku band; dual polarization; flat antenna
收稿日期:2015- 05- 13
作者简介:张瑞东(1984-),男,硕士,工程师。研究方向:陈列天线。
doi:10.16180/j.cnki.issn1007-7820.2016.07.033
中图分类号TN828.5
文献标识码A
文章编号1007-7820(2016)07-113-04
