基于螺旋理论的滑块群驱动机构自由度分析*
2016-07-21张军
张 军
(长江师范学院机械与电气工程学院,重庆涪陵408100)
基于螺旋理论的滑块群驱动机构自由度分析*
张军
(长江师范学院机械与电气工程学院,重庆涪陵408100)
摘要:本文研究的滑块群驱动机构是一种比较少见的少自由度并联机构。该并联机构能够实现X和Y轴的移动以及绕Z轴的转动。运用螺旋理论分别对单个分支的约束和整个并联机构的运动螺旋进行求解。通过螺旋理论中的互逆原理,求解出机构的约束螺旋系,从几何的线性相关性来求解机构的自由度。通过求解约束螺旋系的最大线性无关组和刚化输入后约束螺旋系的最大线性无关组来进行对比分析,判断机构自由度选取的合理性。
关键词:螺旋理论滑块群驱动机构自由度约束
0引言
20世纪90年代以来,由于6自由度的并联机构机械结构复杂,工作空间较小,运动过程控制难度较高,制造加工成本昂贵等难以逾越的弱点,并且通过对少自由度的并联机构进行串联或者并联同样可以实现6自由度机构的功能,因此,广大机器人研究者开始将目光转向少自由度的并联机构[1-4]。在国内的研究者中,余顺年等[5]提出一种能实现空间一个转动、二个移动的空间并联机构,通过对该机构的运动学正反封闭形式的建立,对其工作空间进行了分析。张志良等[6]对一种能够实现一维平动和两维转动的并联机构建立了位置方程,并求解出其的位置正逆解。张二江等[7]采用基于方位特征集的方法对即2PUS-2PRS并联机构的自由度数目进行分析,利用矢量法运算建立了该并联机构的位置逆解模型。
本文对一种能够实现两个移动和一个转动的并联机构进行研究,运用螺旋理论描绘出机构支链的运动螺旋和运动反螺旋,对机构的自由度进行计算和分析,最后对机构输入的选取进行判别。该机构结构简单,易于控制、运动精度高、冲击小,在精密机床、微制造、医疗、军工等精密微调领域有较广泛的应用前景。
1滑块群驱动机构构型的建立
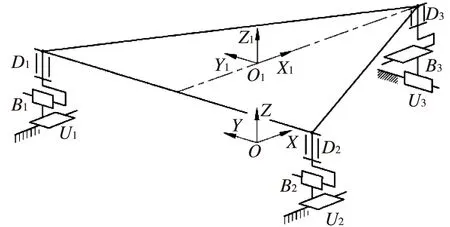
图1 滑块驱动群机构三维模型
本文研究的滑块驱动群机构主要由等边三角形的动平台D1D2D3和定平台U1U2U3、以及连接两个平台的3条支链组成,每条支链分别由两个移动副和一个转动副依次相连组成,如图1所示。其中支链1和支链2的下滑块U1和U2的滑动轨迹相互平行,支链3的下滑块U3与支链1和支链2的下滑块U1和U2运动轨迹垂直,每条支链上相连的两个滑块运动轨迹相互垂直,即Ui的运动轨迹垂直于Bi,每条支链的转动副的轴线位于与它相邻移动副的中心并且垂直于移动副所在平面。在零位时动平台和定平台完全重合。
2滑块群驱动机构自由度分析
2.1各分支运动链对动平台施加的结构约束

图2 机构运动螺旋

第一支链的运动螺旋系为:
(1)
第二支链的运动螺旋系为:
(2)
第三支链的运动螺旋系为:
(3)
对式(1)(2)(3)可求得该机构的约束螺旋系为:


(4)

约束螺旋表示一个力的约束,根据机构的运动反螺旋可知:该约束限制了机构沿Z方向的移动,以及X和Y轴的转动。所以该机构的动平台具有2个移动和1个转动自由度。
2.2机构自由度及瞬时性分析
滑块群驱动机构的三条支链分别都同时对动平台绕X轴和Y轴的转动进行了限制,即对X和Y轴产生约束力偶的作用,同时也对动平台沿Z轴的移动进行了限制,即对Z轴产生约束力的作用。因此该并联机构的公共约束λ=3,d=6-λ=3。且机构中不存在冗余约束和局部自由度,即υ=0,ζ=0。
并联机构的自由度由Chebyshev-Grübler-Kutzbach公式[1]可得:

=3(8-9-1)+9=3
3机构输入的选取与判别
在该并联机构中,分别选取各个支链的底部Ui移动副作为驱动副,由并联机构的输入选取方法可知,如果该驱动副选取正确合理,则将该驱动副刚化后,该机构各个支链的分支螺旋系的秩为满秩。
3.1约束反螺旋最大线性无关组
由机构的约束螺旋系可知,机构有三个公共约束,每条支链都分别限制了动平台绕X轴和Y轴的转动,以及沿Z轴的移动。用观察法很容易看出机构的约束螺旋系是线性无关的,前面所求的机构约束螺旋系即为其最大线性无关组的基。由式(4)可知:k=3,M=3,R=3,ki=3(i=1,2,3),其中,k为机构约束反螺旋的最大线性无关的螺旋个数;M为空间并联机构自由度数,即M=6-k;R为选取的输入个数;ki表示第i个分支对动平台机构的约束数。
3.2刚化输入约束反螺旋及无关组
由前可知,该机构的动平台只能在三维空间中实现X轴和Y轴的移动,以及绕Z轴的旋转运动。根据并联机构输入选取好坏的判据[8]:
1)选取机架副作为输入;
2)选取机构中位置关系有特殊性的移动副作为输入副;
3)不选择消极的运动作为驱动副,因其不能产生相对运动。
又根据机构的原动件个数与自由度相等的原则以及以上三点判据,我们初步选取与底板连接的三个移动副作为整个并联机构的驱动副。然后将三个运动副U1,U2,U3分别刚化。根据螺旋理论中关于反螺旋的相关知识,则就可以求出在坐标系o-xyz中各个支链因运动副被刚化后所增加的反螺旋个数。
第一条支链驱动刚化后运动螺旋为:
第一条支链刚化后相应的运动反螺旋为:




第二条支链驱动刚化后运动螺旋为:
第二条支链刚化后相应的运动反螺旋为:




第三条支链驱动刚化后运动螺旋为:
第三条支链刚化后相应的运动反螺旋为:




从上面三个驱动刚化后的各支链的运动反螺旋可知,各个支链对动平台的约束反螺旋有4个,即:kRi=3。
3.3输入的判别
又由前知,刚化后动平台的反螺旋系A的秩为:
因此,动平台的6个自由度均受到约束,从而失去了所有的自由度。所以这组驱动的选择是合理的。
4结论
本文对一种滑块驱动群机构进行了研究。运用螺旋理论通过求解机构的运动螺旋和约束螺旋对机构的自由度进行分析,及瞬时性进行了判别。通过刚化机构每条支链的驱动滑块,求解刚化后机构的运动螺旋系和约束螺旋系,最后将求解约束螺旋系的最大线性无关组以及输入刚化后的约束螺旋系的最大线性无关组进行对比分析,对输入原动件的合理性进行判别,得出选择三个下滑块作为该并联机构的驱动输入是正确的。
参考文献
[1]黄真,赵永生,赵铁石. 高等空间机构学[M]. 北京:高等教育出版社,2005.
[2]Di Gregorio R. Analytic form solution of the direct position analysis of a wide family of three-legged parallel manipulators[J]. J Mech Des,2006,128(1):264-271.
[3]Kong X W, Gosselin C M. Type synthesis of 3-DOF PPR-equivalent parallel manipulators based on screw theory and the concept of virtual chain[J]. J Mech Des,2005,127(6):1113-1121.
[4]刘宏伟. 基于螺旋理论的少自由度并联机构运动分析[J]. 制造业自动化,2009,31(7):101-103.
[5]余顺年,马履中.两平移一转动并联机构位置及工作空间分析[J]. 农业机械学报,2005,36(8):103-106.
[6]张志良,李瑞琴,郭彦军.一种2R1T空间并联机构及其位置分析[J]. 机械传动,2014,38(1):23-26.
[7]张二江,李永刚.新型四自由度并联机构位置逆解分析[J]. 天津职业技术师范大学学报,2011,21(4):7-11.
[8]杨东超,宾洋,贾振中,赵旦谱.并联机构驱动副的选择[J]. 机械工程师,2007(8)13-15.
中图分类号:TH11
文献标识码:A
文章编号:1002-6886(2016)03-0024-03
基金项目:长江师范学院科研资助项目(2014QN018)。
作者简介:张军(1987-),男,重庆涪陵人,长江师范学院机械与电气工程学院,工学硕士,研究方向为机电一体化技术、并联机床。
收稿日期:2015-04-14
Analysis of the degrees of freedom of a slider group driving mechanism based on the screw theory
ZHANG Jun
Abstract:The slider group driving mechanism we studied is a relatively rare less-degree-of-freedom parallel mechanism, which can move along X and Y axis and rotate around Z axis. In this paper, we used the screw theory to solve the motion screws of a single branch and the whole parallel mechanism respectively. Using the reciprocal principle of the screw theory, we solved the constraint screws of the parallel mechanism. We also solved the degrees of freedom of the mechanism from the aspect of geometric linear correlation. By comparing the maximal linearly independent set of the constraint screws and that of the constraint screws after rigidified input, we judged the rationality of the degree of freedom to choose.
Keywords:screw theory; slider group driving mechanism; degrees of freedom; constraint