高压断路器自卫延时阀的研究
2016-07-21张建卓杜之淳
张建卓 杜之淳 王 洁 隋 心
1.辽宁工程技术大学,阜新,1230002.大连理工大学,大连,116024
高压断路器自卫延时阀的研究
张建卓1杜之淳1王洁1隋心2
1.辽宁工程技术大学,阜新,1230002.大连理工大学,大连,116024
摘要:为保证高压输电网的安全稳定运行,高压断路器需要具备自卫延时功能,现有高压断路器操动机构自卫延时是通过辅助开关、时间继电器等方式实现的,存在延时结构复杂、可靠性差等问题,为此,提出了一种基于操动机构自身液压系统的延时机构,通过调整延时阀阀芯运动位移实现延时时间的无级调节。采用优化设计和正交仿真试验的方法对其结构参数进行优化,根据优化结果加工两台试验样机并进行实验研究,实验测得延时时间范围是41.6~59 ms,能够满足电网安全运行要求。
关键词:高压断路器;自卫能力;延时阀组;优化设计;正交试验
0引言
断路器是高压开关设备中最重要的组成部分,承担着控制和保护的双重任务[1-4]。断路器的自卫延时就是重合闸过程中触头从闭合到第二次分开有一定时间,使得灭弧室的工况有充分的时间由合闸过程转变为分闸前所需要的状态。国家电网使用的超高压断路器曾因时间不够导致断开失败[5],根据《电力系统安全稳定导则》(DL/T755-2001)及有关规定要求,断路器合-分时间的设计要求值一般取50±10ms[6]。
目前实现自卫延时有两种方法:一种是在合闸回路通过时间继电器实现延时功能,但是其延时控制回路比较复杂,且时间继电器的电气特性直接关系到断路器的工作性能,实际工作中还存在断路器动作时间与继电保护装置动作时间配合不当的问题[7];另一种是利用辅助开关来实现,辅助开关是一种能够使自卫延时时间得到较好控制的机构[8-9],其动作过程包括主动卡片动作过程和从动卡片动作过程(延时运动过程)[10-13]。
为了获得高稳定性延时机构,简化延时操作机构,降低故障率,提高系统安全稳定性,最好的方式是通过断路器自身结构来实现。基于此,本文提出了一种新的基于操动机构自身液压系统的延时结构,并实现延时时间的无级调节。
1断路器操动机构原理
高压断路器液压操动机构工作原理如图1所示。该弹簧液压操动机构属于高速大功率双稳态电液驱动系统,有合闸、分闸两种工作状态,延时功能由二级控制阀实现。

1.主工作缸 2.主阀 3.逆止阀 4.分闸先导阀 5.合闸先导阀 6.延时阀 7.溢流阀 8.高压单柱塞泵 9.蓄能器图1 液压操动系统原理示意图
操动机构工作时高压单柱塞泵8向蓄能器9储液,当蓄能器9达到额定工作压力时,电机停止工作;蓄能器9压力下降时系统自动补压,时刻保持压力稳定。蓄能器9为液压系统提供工作恒压油源,保证主工作缸1的有杆腔和延时阀芯的环形腔始终保持高压。当合闸先导阀5通电时,左阀位接入系统,高压油经由逆止阀3推动主阀2的阀芯左移,右阀位导通,高压油经由主阀2进入主工作缸1的活塞腔,此时主工作缸1的活塞杆受到向左的合力,推动操动机构快速伸出,实现断路器合闸动作;与此同时,高压油经阻尼孔流入延时阀6阀芯的左端面,延时阀阀芯向右移动。当分闸先导阀4通电时,左阀位接入系统,此时主阀2的b油路和油箱连通,主阀2阀芯右移而工作在左阀位,使得主工作缸1的活塞腔与油箱连通,主工作缸1的活塞受到向右的合力,带动操动机构迅速缩回,实现断路器分闸。
断路器进行重合闸操作时,合闸先导阀5一直处于合闸位置,当输电线路出现故障时分闸先导阀4通电,断路器进行分闸动作。分闸后再次进行重合闸,在合闸过程中如果分闸信号消失,断路器合闸并保持合闸状态;如果分闸信号仍然存在,此时只有当延时阀6的阀芯运动到指定位置,分闸先导阀4才能与油箱连通,断路器完成分闸动作。
2延时阀结构及优化设计
基于操动机构自身液压系统实现断路器自卫延时功能的控制阀结构如图2所示。
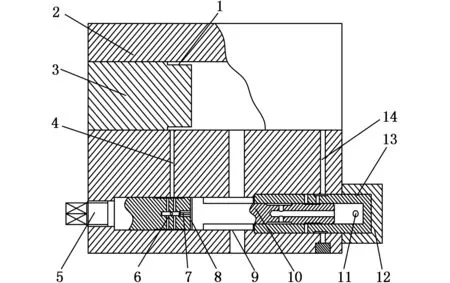
1.阀套环形缝隙 2.主阀 3.阀套(简化) 4.细长管 5.延时调整杆 6.延时阀杆小孔 7.细长孔 8.延时阀芯左端面 9.高压油入口 10.延时阀芯 11.低压油出口 12.压板 13.延时阀套 14.主阀芯回油图2 延时机构结构原理图
合闸信号发出时,高压油进入主工作缸的活塞腔,操动机构实现合闸动作,与此同时高压油经入口9进入环形缝隙1,经细长管4、延时调整杆小孔6和细长孔7到达延时阀芯左端面8,此时延时阀芯受到向右的合力,推动延时阀芯10向右移动,延时阀芯10运动的时间即为延时时间。只有当延时阀芯移动到指定位置处,主阀芯回油14和低压油回油11接通,此时出现分闸信号才能使操动机构主阀换向,主工作缸的活塞腔与油箱接通,实现断路器操动机构分闸,这样就保证操动机构不会在未合闸到位前就出现分闸的动作。
由上述分析可知,延时阀芯的运动时间即为延时时间,影响阀芯运动时间有两个因素,即延时阀芯10的运动位移范围和运动速度。而这两个因素主要取决于延时调整杆5的结构参数。延时调整杆结构设计首先确定理论最优解,再通过正交仿真试验确定最优解,最后通过实验验证。
2.1优化设计
首先建立时间差值的目标函数。操动机构延时时间设计范围是40ms至60ms。以延时阀芯位移在最大值时为例进行分析,延时调整杆的优化设计问题归结为延时阀芯运动时间与要求合-分上限时间60ms的绝对值最小。建立目标函数如下:
f(d3,l3,n,d4,l4)=
式中,l1为环形缝隙1的长度,mm;d1为环形缝隙1内圆柱体直径,mm;h1为环形缝隙1厚度,mm;l2为细长管4的长度,mm;d2为细长管4的直径,mm;d5为延时阀芯10左端面的直径,mm;d6为延时阀芯10右端面的直径,mm;l7为延时阀芯10节流口的长度,mm;d7为延时阀芯10节流口的直径,mm;p为延时阀芯左端面8的压力,MPa;μ为液压油的动力黏度,Pa·s;s为延时阀芯10运动的位移,mm;n为延时阀杆小孔6的个数;d3为延时阀杆小孔6的直径,mm;l3为延时阀杆小孔6的长度,mm;l4为延时阀杆细长孔7的长度,mm;d4为延时阀杆细长孔7的直径,mm。
由于阀体结构限制,l1、d1、h1、l2、d2、d5、d6、l7、d7、p、μ、s为已知常量,在设计过程中保持不变。5个设计变量分别为:n、d3、l3、l4、d4。
目标函数中有5个设计变量,这是五维非线性优化问题,采用复合形法进行优化设计[14-15],利用MATLAB提供的复合形法程序中的两个函数进行计算:主函数opt_complex完成初始可行点、复合形形心及反射、延伸、收缩等计算;函数gen_complex根据初始可行点产生复合形[11]。优化计算结果如表1所示。

表1 优化结果 mm
上述优化计算目标函数是在理想简化模型情况下进行的,忽略了涡流等因素。以表1的优化结果作为一个参考点,小孔的个数保持4个不变化,采用正交仿真试验的方法对其余4个参数进行优化得到最优值。
2.2正交试验
设计变量取d3、l3、d4、l4这4个因素,每个因素3个水平,正交试验的因素和水平如表2所示。
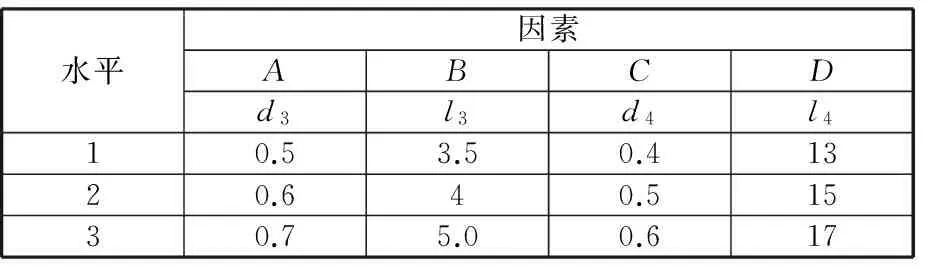
表2 因素和水平 mm
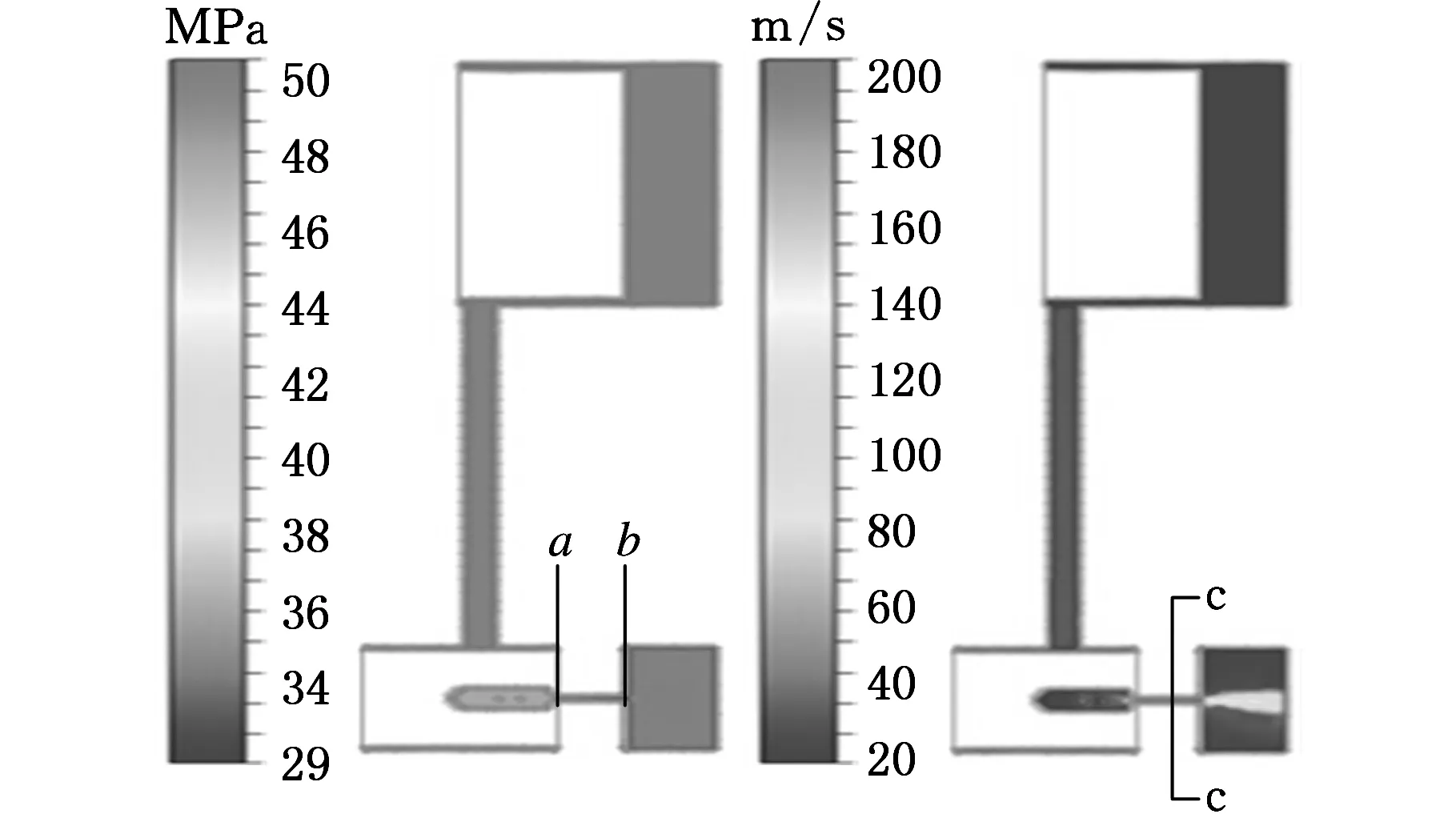
选用L27(313)正交表[16],每个水平进行9次试验,试验总次数为27,并查交互作用表,作出各因素及其交互作用的安排,试验采用虚拟仿真的方法进行,在Inventor软件里建立阀组的三维模型后导入到Simulation CFD中进行流场分析。Simulation CFD 是一款进行传热和流体流动分析的计算流体力学(CFD)工具软件。它可以进行高速湍流与不可压缩流,以及导热与对流传热的三维仿真分析。液体参数按照10号液压油标准设置,采用压力场标准的湍流模型求解。图3为第11组试验的压力云图和速度云图,图4为图3中从a点到b点的压力变化曲线,出口压力为29 MPa。图5所示为图3中c-c截面速度变化曲线,出口平均流速为197 m/s。计算出延时阀芯运动的平均速度,进而计算出延时阀芯运动的时间为58.487 ms。
(a)压力云图 (b)速度云图图3 第11组试验压力云图和速度云图

图3中a到b的距离dab/mm图4 图3中从a点到b点的压力变化曲线
图3中c-c截面的距离dc-c/mm图5 图3中c-c截面速度变化曲线
所有的正交试验组按照相应参数改变三维模型,并进行仿真模拟,得到的虚拟仿真分析结果列于表3中。其中,Ki(i=1,2,3)表示各因素的第i个水平试验结果之和;Q为Ki的平方和除以各因素第i个水平试验次数得到的平均值;S为各因素的离差平方和,反映了某一因素的水平变化对试验结果的影响程度。

表3 L27(313)试验正交表及分析结果
2.3正交试验设计的方差分析
将各因素平均离差平方和与误差平均离差平方和之比,得出F值。F值的大小体现了各因素对试验结果的影响程度的大小。给出检验水平α为0.01,从F分布表[12]中查出临界值F0.01(2,18)=6.01。将临界值与表4中的FA、FB、FC、FD比较,得到A、B、D因素的影响不显著,C因素的影响是高度显著的结论,将上述分析计算概括地列成方差分析表,如表4所示。

表4 方差分析表
由表4分析结果可知,最优方案为A2B2C2D3。但是这个最优方案并未在已经做过的27次试验中出现,而与之较为接近的是第11次试验,在第11次试验中只有因素B不是处在最好水平,但是因素B对试验结果的影响是这4个因素中最小的。为了判定试验方案一(A2B2C2D3)和第11次试验方案二(A2B1C2D3)的优劣,需进行样机实验对比测试。
3实验分析
建立断路器操作机构实验数据采集系统,操动机构实验样机如图6所示。按试验方案一(A2B2C2D3)、试验方案二(A2B1C2D3)加工延时调整杆进行对比实验。
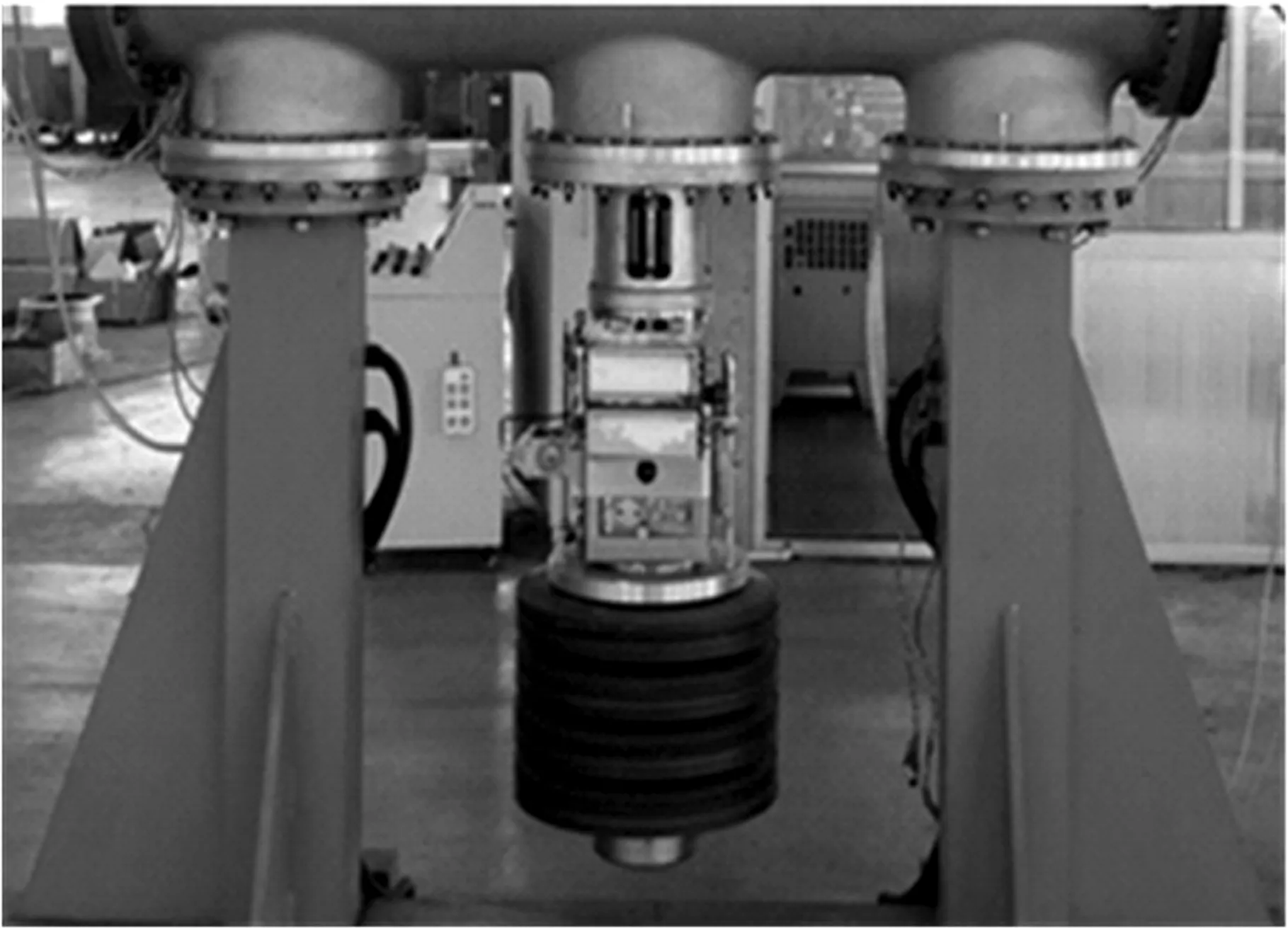
图6 弹簧液压操动机构
方案一重合闸测试实测曲线如图7所示,方案二的重合闸测试实测曲线如图8所示。
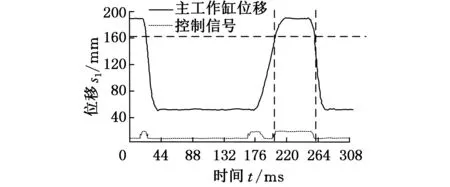
图7 方案一重合闸测试实测曲线
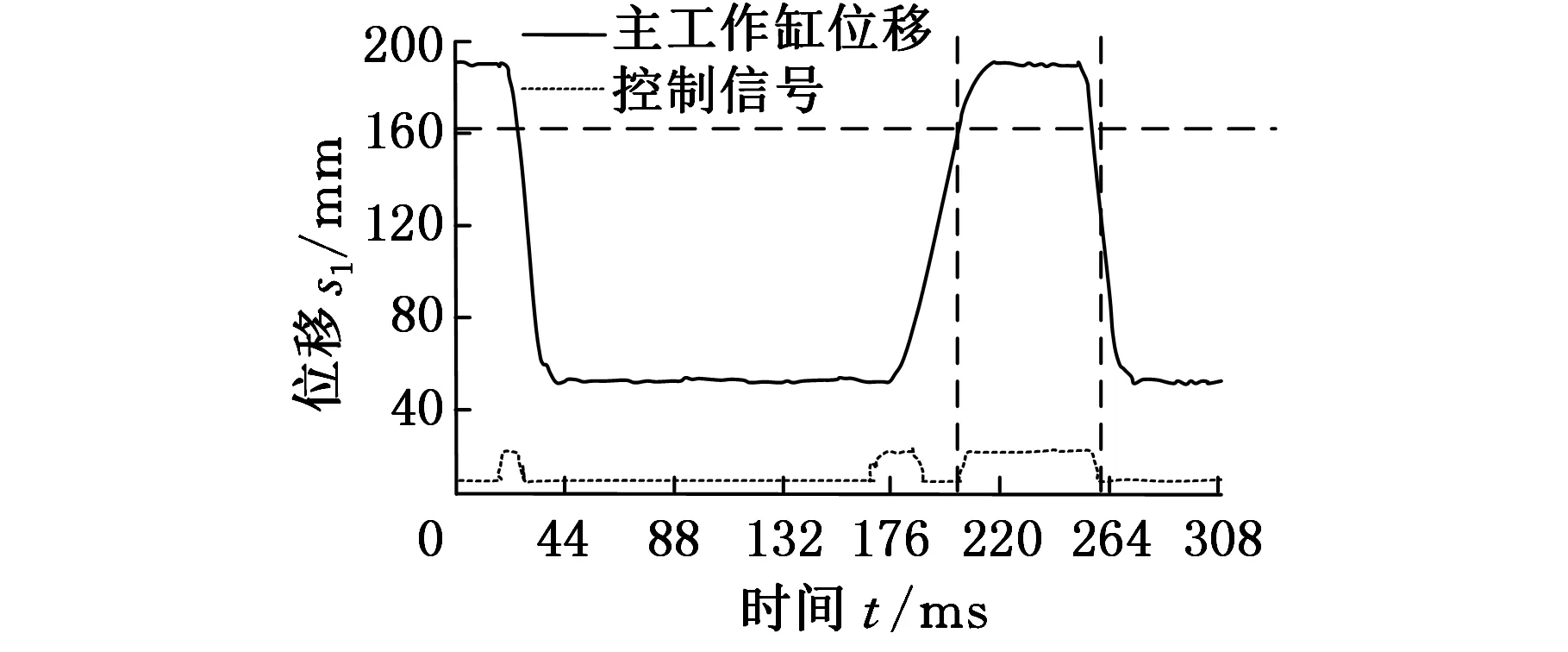
图8 方案二重合闸测试实测曲线
图7中,合分闸延时时间为57 ms,与实际要求60 ms存在5%的误差;图8中,合分闸延时时间为59 ms,与实际要求60 ms存在1.6%的误差。试验方案二的实测结果误差为1.6%,可以满足应用要求。因此,最终确定实验方案二为最优方案。
调节延时调整杆5(图2)使得延时阀芯10(图2)运动位移最小,再次进行重合闸测试,所得曲线如图9所示。从图9中可以看出,它的合分闸延时时间为41.6 ms,与实际要求40 ms存在4%的误差。这样通过调节延时调整杆的位移可使合分闸延时时间在41.6~59 ms范围内无级调节。
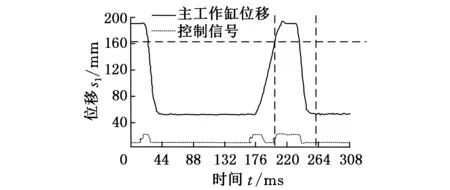
图9 方案二延时阀芯位移最小时测试实测曲线
4结束语
提出了一种基于操动机构自身液压系统的延时方法,通过控制阀组实现断路器操动机构的延时自卫功能,并能实现延时时间的无级调节。对延时阀组的关键元件延时阀杆进行了优化设计,并通过正交仿真试验获得优化设计方案。进行样机试制和实验研究,实验结果表明,优化设计的延时阀组能够实现延时功能且延时时间可实现无极调节。
参考文献:
[1]SweetserC,BergmanWJ,MontilletG,etal.StrategiesforSelectingMonitoringofCircuitBreakers[J].IEEETransactionsonPowerDelivery,2002,17(3):156-160.
[2]林莘,李永祥,马跃乾,等.高压断路器新型电机操动机构的动态特性分析[J].电机与控制学报,2009,13(2) :216-221.
LinXin,LiYongxiang,MaYueqian,etal.DynamicCharacteristicsAnalysisonNovelMotorActuatorofHighVoltageCircuitBreaker[J].ElectricMachinesandControl,2009,13(2) :216-221.
[3]刘振亚.特高压交直流电网[M].北京:中国电力出版社,2013.
[4]LingZhou,WeiDongshi.PerformanceOptimizationinaCentrifugalPumpImpellerbyOrthogonalExperimentandNumericalSimulation[J].AdvancesinMechanicalEngineering,2013,12:333-335.
[5]金立军,张勇,王珂,等.用于金属短接时间控制的辅助开关操动特性研究[J].中国电机工程学报,2011,31(15):121-126.
JinLijun,ZhangYong,WangKe,etal.OperationCharacteristicsofAuxiliarySwitchControllingClose-openTime[J].ProceedingsoftheCSEE,2011,31(15):121-126.
[6]赵江涛,刘彬.几种SF6断路器金短时间的探讨[J].中国科技投资,2013,32(26):78-87.
LiuJiangtao,LiuBin.SeveralKindsofSF6CircuitBreakerGoldtoExploreforaShortPeriodofTime[J].ChinaVentureCapital,2013,32(26):78-87.
[7]范春燕,朱良銉.断路器金属性短接时间对保护的影响[J].山西电力,2012(4):20-21.
FanChunyan,ZhuLiangyu.CircuitBreakerMetallicityShortTimeImpactonProtection[J].ShanxiElectricPower,2012(4):20-21.
[8]王连鹏,王尔智.SF6 断路器空载开断下液压操动机构与灭弧室联合仿真研究[J].中国电机工程学报,2005,25(20):118-123.
WangLianpeng,WangErzhi.InvestigationofJointSimulationunderNoLoadBreakingforHydraulicActuatorandArc-quenchingChamberofSF6CircuitBreaker[J].ProceedingsoftheCSEE,2005,25(20):118-123.
[9]刘伟,徐兵,杨华勇,等.超高压断路器液压操动机构分合闸特性研究[J].机床与液压,2008,36(10):108-112.
LiuWei,XuBing,YangHuayong,etal.StudyontheOpeningandClosingCharacteristicsofSuper-highVoltageCircuitBreakerwithHydraulicOperatingMechanism[J].MachineTool&Hydraulics,2008,36(10):108-112.
[10]ZeineldinHH,El-SaadanyEF,SalamaMMA,etal.HighVoltageCircuitBreakerModelingforOnlineModel-basedMonitoringandDiagnosis[J].IEEEInnovationsinInformationTechnology,2007,21(3):317-321.
[11]NouriH,KharinSN,TirmiziSI,etal.ModellingofArcDurationandErosioninElectricalContactsofCircuitBreakers[C]//39thInternationalUniversitiesPowerEngineeringConference.Bristol,UK:IEEE,2004:103-108.
[12]ChangGW,HuangHM,LaiJH.ModelingSF6CircuitBreakerforCharacterizingShuntReactorSwitchingTransients[J].IEEETransactionsonPowerDelivery,2007,22(3):1533-1540.
[13]ChompusriY,KleesuwanS,CharbkaewN,etal.HighVoltageSF6CircuitBreakerModelingforCapacitorBankControlledSwitchingSimulation[C]//2010InternationalConferenceonElectricalEngineering/ElectronicsComputerTelecommunicationsandInformationTechnology(ECTI-CON).ChiangMai,Thailand:IEEE,2010:464-467.
[14]韩晓明,铁占续.机械优化设计及其MATLAB实现[J].焦作工学院学报(自然科学版),2004,23(6):467-470.
ChaoXiaoming,TieZhanxu.MechanicalOptimizationDesignandMATLAB[J].JournalofJiaozuoInstituteofTechnology(NaturalScience), 2004,23(6):467-470.
[15]孙全颖.机械优化设计[M].哈尔滨:哈尔滨工业大学出版社,2012.
[16]陈魁.试验设计与分析[M].北京:清华大学出版社,2005.
(编辑袁兴玲)
收稿日期:2015-08-31
基金项目:国家自然科学基金资助项目(51574140)
中图分类号:TH123
DOI:10.3969/j.issn.1004-132X.2016.12.018
作者简介:张建卓,男,1971年生。辽宁工程技术大学机械工程学院教授。主要研究方向为机械设计/振动控制工程、机电液一体化。发表论文30余篇。杜之淳,男,1988年生。辽宁工程技术大学机械工程学院硕士研究生。王洁, 女,1981年生。 辽宁工程技术大学机械工程学院讲师。隋心,男,1994年生。大连理工大学机械工程学院本科生。
StudyonSelfDefenseDelayValveofHighVoltageCircuitBreaker
ZhangJianzhuo1DuZhichun1WangJie1SuiXin2
1.LiaoningTechnologyUniversity,Fuxin,Liaoning,123000 2.DalianUniversityofTechnology,Dalian,Liaoning,116024
Abstract:In order to ensure the safety and stable operation of high voltage transmission network, the high voltage circuit breaker needed to have the function of self defense delay. The existing high voltage circuit breakers realized this function by the auxiliary switch, time relay and other ways, but it resulted in the problems of structural complexity and low reliability. A new type of self defense delay structure was proposed herein based on the hydraulic system of the operating mechanism, which might adjust the time delay steplessly by adjusting the displacement of the self defense delay valve spool. The optimized design and orthogonal experiments were used to optimize the parameters of the structure. According to the optimized results, two experimental prototypes were processed and the experimental study was carried out. The measured results are in the range of 41.6~59 ms, which can meet the requirements of the safe operation of power grid.
Key words:high voltage circuit breaker; self defense ability; time-delay valve group; optimization design; orthogonal experiment
