渔船拖网绞机恒张力控制系统的设计与仿真
2016-07-18徐晓栋龚玉玲吕玉青
徐晓栋, 龚玉玲, 吕玉青
(1 泰州学院,江苏 泰州 225300;2 泰州中航船舶重工有限公司,江苏 泰州 225300)
渔船拖网绞机恒张力控制系统的设计与仿真
徐晓栋1, 龚玉玲1, 吕玉青2
(1 泰州学院,江苏 泰州 225300;2 泰州中航船舶重工有限公司,江苏 泰州 225300)
摘要:针对拖网捕捞作业中较难保持曳纲张力恒值的问题,设计并搭建了基于模糊PID控制的渔船拖网绞机恒张力控制系统。在对渔船拖网绞机传动原理研究的基础上,建立恒张力控制系统的传递函数,构建模糊PID控制器,通过控制拖网绞机转速而调节曳纲张力。介绍了系统硬、软件的构成,并利用MATLAB进行仿真验证。仿真结果表明,模糊PID控制能在0.8 s内实现曳纲张力恒值,并能在收到干扰后0.7 s内恢复到之前的稳定状态,性能优于传统PID控制和模糊控制。研究表明,基于模糊PID控制的渔船拖网绞机恒张力控制系统具有系统响应快、超调量小、鲁棒性强等特点,能够有效地保持曳纲张力恒值,提高捕捞效率,具有较强实践指导意义。
关键字:拖网绞机;曳纲;恒张力;模糊PID控制
拖网捕捞是我国最重要的渔业捕捞方式之一。在拖网捕捞作业中,左、右绞机通过曳纲拖曳网具,但渔船会因海浪波动、捕鱼量变化等因素造成曳纲张力变化,使网具的形状发生变形,影响捕捞作业效果[1]。为了保持网具形状,应使曳纲处于恒张力的状态,即当曳纲张力变小时,增加拖网速度;当曳纲张力变大时,减小拖网速度。如何快速、灵敏地调节拖网速度,保持曳纲张力恒值,提高捕鱼效率,是控制系统研究的关键[2]。
传统的拖网绞车大多采用液压驱动的方式,在液压绞车的恒张力控制方面已有相关的研究报道[3-8]。随着渔业机械化、自动化、智能化的发展,拖网绞车逐渐由结构复杂、效率较低的液压控制系统向结构紧凑、效率较高的交流电力控制系统转变。一般的拖网绞车电力控制常采用PID控制,结构简单、易于调整[9]。但在实际作业中环境是变化的,造成绞机负载时刻变化,控制系统具有非线性和时变性,系统各参数之间很难建立精确的数学模型。在负载变化的条件下,固定参数的PID控制难以达到理想的控制效果[10-13]。因此,本文提出将模糊控制和PID控制相结合,采用模糊PID控制系统实现曳纲张力的动态平衡。
1系统传动原理
曳纲恒张力控制系统主要由张力传感器、电机、控制柜等组成(图1)。其工作原理是:控制柜控制电机,通过减速器、电磁离合器,实现绞机滚筒的调速和正反转、收放钢丝绳,调节曳纲张力。曳纲张力由张力传感器测得,反馈到控制柜,经过模糊PID控制系统运算、比较,通过变频器调节电机,保证绞机处于恒张力状态。

图1 控制系统结构图Fig.1 Structure diagram of control system
2系统模型及传递函数
变频器可将其近似处理为一阶惯性环节[14-15],输入电压Uk与输出电压Ud之间的传递函数为:
式中:Kp—变频器变化系数;Ts—控制滞后时间。
变频器采用电压矢量PWM控制,忽略旋转电压的影响,电流Id和电压Ud之间的传递函数可近似为下列公式[16-18]:
式中:τ1、τ2—常数;R—电阻,Ω。
由电动机转矩:
Mm=KTΦmIdcosφd
式中:Mm—电动机转矩,N·m;KT—常数;Φm—每极磁通量,Wb;Id—转子电流,A;φd—相位角,度。
可得转矩与电流之间的传递函数为:
式中:Kz—常数。
曳纲张力的大小是由电动机转矩所产生的,忽略传动过程中的损耗,得力矩的平衡方程为:
式中:MT—曳纲张力作用于绞机的力矩,N·m;T—曳纲张力,N;D—卷筒直径,m。
可得张力与转矩之间的传递函数为:
由上述公式计算,可得系统总的传递函数为:

3模糊PID控制系统设计
3.1模糊PID控制器的设计方案
在PID控制过程中,控制器根据采样时刻的偏差值来计算输出量。离散的PID表达式为:
式中:Kp—比例参数;Ki—积分参数;Kd—微分参数;e(k)—采样时刻的偏差值。
PID控制方法中的Kp可对偏差作出快速响应,加快响应速度有利于稳定。Ki可以消除系统静态误差,提高控制精度;Kd可以预测未来输出,减少系统超调量。采用模糊控制对PID参数Kp、Ki、Kd进行修整,从而减小超调,缩短调节时间,提高控制精度,改善控制性能。因此将模糊控制器和PID控制器结合起来,以获得更好控制效果[19-22]。模糊PID控制器的系统方案见图2。

图2 曳纲恒张力模糊PID控制框图Fig.2 Fuzzy PID control block diagram ofwarp constant tension
模糊控制器采用双输入三输出,以曳纲的实际张力与给定的最优张力值(在保证曳纲安全的情况下,为使工作效率达到最佳而设定的值)之间的偏差E和偏差变化率EC作为模糊控制系统的输入量,根据模糊控制规则,进行模糊控制判断,得到模糊控制系统的输出量PID整定参数ΔKp、ΔKi、ΔKd,并根据PID参数自整定公式对3个参数Kp、Ki、Kd进行修整。
式中:Kp、Ki、Kd—PID参数修整后的值;Ki′、Ki′、Kd′—PID参数初始值。
3.2变量取值及相应的隶属函数
根据绞机系统的实际情况和控制精度要求,设定张力偏差E和偏差变化率EC的离散论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},对应的模糊语言变量为{负大,负中,负小,零,正小,正中,正大},记为{NB,NM,NS,O,PS,PM,PB};输出控制量ΔKp、ΔKi、ΔKd的离散论域为{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},对应的模糊语言变量为{NB,NM,NS,O,PS,PM,PB}。它们的隶属函数采用三角形隶属函数。
3.3模糊规则以及推理
根据拖网绞机控制系统特点进行综合和归纳可得如下关系:(1)当张力偏差|E|较大时,为提高响应速度,应取较大的Kp值;为了防止积分饱和,Ki应设置较小甚至为0;为加快系统响应时间,Kd可设置较小。(2)当张力偏差|E|处于中等时,Kp应取较小值,使系统有一定的响应速度且具有较小的超调;Ki、Kd取值应适度,保持系统稳定性。(3)当张力偏差|E|较小时,Kp、Ki值应增加,减小调节静差;为避免系统出现震荡,Kd应减小。通过以上分析,结合现场操作的实际经验,得到模糊控制规则,其相应的模糊推理规则见表1。

表1 ΔKp、ΔKi、ΔKd的模糊推理规则表
3.4输出量清晰化
应用最大隶属度法进行模糊判断,将输出量由模糊量变为精确量,生成模糊控制查询表。根据PID参数自整定公式得到参数Kp、Ki、Kd的精确值。
4系统构成
4.1硬件配置
硬件结构由PLC控制柜、变频器、控制台和手动控制盒构成。PLC主机选用西门子S7-200系列的CPU222PLC控制器;变频器采用西门子MM440变频器(MICROMASTER 440),该变频器有6个数字量输入端口,端口5和6分别控制电机正转和反转。电机的主要参数:额定功率P=4.2 kW,转动惯量J=0.089 kg·m2,常数τ1=2.4 ms,τ2=6.6 ms,KT=4.08 N·m/A。曳纲张力传感器选用PAT销轴式传感器,其外形简单,加工精度高,使用方便,输出4~20 A电信号。选用EM223作为PLC输入/输出模块,用于接受曳纲张力的信号和输出给变频器的调节信号。
4.2软件设计
4.2.1下位机软件设计
采用编程软件STEP7对PLC进行编程,图3为主程序流程。
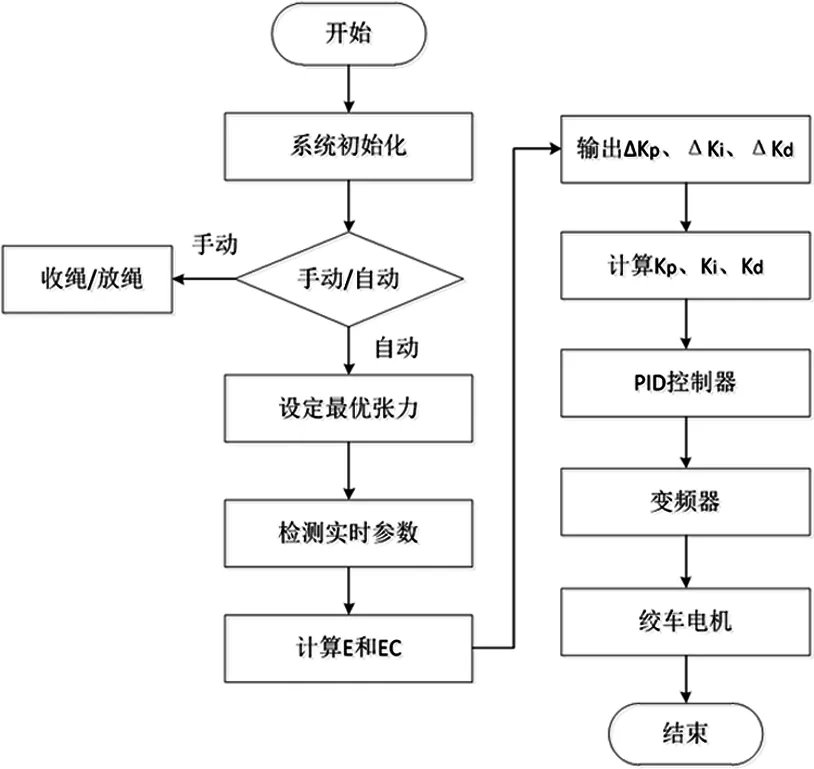
图3 曳纲恒张力控制流程图Fig.3 Flow chart of warp constant tension
最优张力值通过上位机人工输入,存储到VW100中;张力传感器将采集到的实际张力值存储到VW102中,将计算E、EC值存储到VW104、VW106,将经过模糊处理得到的ΔKp、ΔKi、ΔKd值存储到VW120、VW122 、VW124,再计算出Kp、Ki、Kd值,最后将Kp、Ki、Kd值送至PID控制器,进而控制绞机电动机,直至曳纲张力满足要求后,退出程序。
4.2.2上位机组态设计
本系统使用PC作为上位机。曳纲张力控制分为手动和自动,手动控制部分较简单,自动控制即模糊PID恒张力控制。上位机屏幕可以实时显示曳纲的张力、长度和速度等信号,通过界面,可以直观地了解绞机的运行状态,便于控制。
5仿真试验
以泰州某船厂拖网绞机自动化项目为例进行仿真验证。在MATLAB的Simulink环境下,建立模糊控制系统的模型,并利用模糊逻辑工具箱,建立模糊推理系统并保存。仿真结果见图4。

图4 系统响应曲线图Fig.4 Response curve of control system
图4是输入12 T拉力的阶跃响应曲线,可以看出,采用普通PID控制,输出若要达到稳定,需要1.7 s,调节时间较长,超调量16%左右;采用模糊控制,输出达到稳定的时间是1.1 s,调节时间较普通PID控制稍短,超调量也较小,为6%左右。模糊PID控制在0.8 s后就达到稳定状态,而且几乎没有超调,调节时间比普通PID控制缩短了53%,比模糊控制缩短了27%,充分说明模糊PID能够提高系统的响应性能。
为了测试系统在遇到风浪等偶然性阻力突发因素的影响而导致曳纲张力发生突变时的抗干扰能力,在3 s左右人为地加入一个力作为干扰,力的大小为21.5 T,变化幅度为80%,从图4可以看出,模糊PID控制系统能迅速作出调节,0.7 s左右重新回到最优张力位置,普通PID控制和模糊控制分别需要1.4 s和0.9 s,说明模糊PID能有效地抑制干扰,具有很强的鲁棒性,性能比普通PID控制和模糊控制优越。
6结论
设计并搭建基于模糊PID控制的渔船拖网绞机恒张力控制系统,利用MATLAB软件对恒张力控制系统进行了仿真。仿真结果表明,模糊PID控制的调节时间比普通PID控制缩短了53%,比模糊控制缩短了27%,具有响应快、超调量小、抗风浪等突发因素强的特点,实现自动调节控制,减少人工作业劳动强度,有效提高了捕捞效率,具有较强的实践指导意义。
□
参考文献
[1]徐志强,羊衍贵,王志勇,等.大型远洋拖网渔船拖网被动补偿系统的研究[J].船舶工程,2013,35(4):51-54.
[2]刘全良,王石刚,戎瑞亚.基于C&R_BR的拖网绞机集成推理研究[J].中国机械工程,2002,13(8):692-695.
[3]谢安桓,宋金威,喻峰,等.曳纲绞车液压系统的设计及控制研究[J].液压与气动, 2014 (10):11-16.
[4]王永鼎,潘海.基于PDF控制的恒张力绞车控制系统设计与仿真[J].测控技术, 2014, 33(4):66-69.
[5]常晴晴,孙斌,高世阳.基于AMESim与SIMULINK的双绞车恒张力控制研究[J].液压与气动,2011(10):107-110.
[6]KOTWICKI S, WEINBERG K L, SOMERTON D A.The Effect of Autotrawl Systems on the Performance of a Survey Trawl[J].Fishery Bulletin,2006,104(1):35-45.
[7]鄢华林,宋林.恒张力绞车的应用研究[J].液压与气动,2011(7):80-82.
[8]沈瑜.基于模糊PID的恒张力控制系统设计[J].液压气动与密封,2009(2):48-51.
[9]王志勇,谌志新,徐志强.渔船拖网绞机电力控制技术研究[J].渔业现代化, 2015, 42(1):53-56.
[10]冯林,张新福,翟性泉.基于模糊自适应PID的波浪补偿控制器研究[J].船舶工程,2012,34(S2):107-109.
[11]徐礼平,高宏力,高育帼,等.模糊PID电阻丝恒速恒张力绕制控制[J].机械设计与制造,2013(3) :117-119.
[12]陈硕,郭加定,蓝兆辉,等.直线式拉丝机恒张力拉拔控制系统的研究[J].机械制造与自动化, 2015, 44(1):190-193.
[13]赵学观,徐丽明,何绍林,等.玉米定向种子带恒张力卷绕系统自适应模糊PID控制[J].农业机械学报, 2015, 46(3):90-96.
[14]陈冲.模糊控制在电机变频调速系统中的应用[J].电机与控制应用,2012,39(8):55-58.
[15]王智忠.感应电动机的闭环控制系统设计[J].微计算机信息, 2006,22(10):51-52.
[16]崔业兵,陈雄,蒋魏,等.自适应模糊神经控制器的电动舵机控制[J].微特电机,2013,41(12):57-60.
[17]罗天资,陈卫兵,邹豪杰,等.直线电机模糊增量PID控制算法的研究[J].测控技术, 2011,30(2):56-59.
[18]胡均平,代建龙,刘成沛,等.自调整模糊控制在动力头变频调速中的应用[J].测控技术,2013,32(9):74-76.
[19]苗中华,李闯,韩科立,等.基于模糊PID的采棉机作业速度最优控制算法与试验[J].农业机械学报, 2015, 46(4):9-14.
[20]ZHANG Y,CHEN Z Q,YAN Z Z.Nonlinear system PID-type multi-step predictive control[J]. Journal of ControlTheory and Applications,2004,2(2):201-204.
[21]姬江涛,王荣先,符丽君.联合收获机喂入量灰色预测模糊PID控制[J].农业机械学报,2008,39(3):63-66.
[22]仇成群,刘成林,沈法华,等.基于Matlab和模糊PID的汽车巡航控制系统设计[J].农业工程学报,2012,28(6):197-202.
Design and simulation for constant tension control system of fishing vessel trawl winch
XU Xiaodong1, GONG Yuling1, LV Yuqing2
(1TaiZhouUniversity,TaiZhou225300,China;2TaizhouCATICShipbuildingHeavyIndustryCo.,Ltd,TaiZhou225300,China)
Abstract:Focused on the difficulty in maintaining a constant value of the warp tension in trawl fishing, fuzzy-control and PID control system is designed and set up to achieve constant tension. Based on the driving principle of the trawl winch, the transfer function of the warp constant tension control system is established, then fuzzy PID controller is constructed to adjust the warp tension by controlling the speed of trawl winches. The structure of the hardware and software is described and the result is simulated by Matlab. The simulation result shows that warp tension will reach a constant value in 0.8s by using fuzzy PID control system and will return to the previous stable state in 0.7s after receiving the interference, which is better than the traditional PID control and fuzzy control. Research shows that the fuzzy PID control system has the characteristics of fast response, small overshoot, and strong robustness and so on and maintains the warp tension constant effectively for constant tension control system of fishing boats trawling winch, which will improve the fishing efficiency and has a great significance in guiding practice.
Key word:trawl winch; warp; constant tension; fuzzy PID control
DOI:10.3969/j.issn.1007-9580.2016.03.012
收稿日期:2016-03-03修回日期:2016-05-16
基金项目:泰州学院校级课题(TZXY2014YBKT003);江苏省高校自然科学研究项目(14KJB460033)
作者简介:徐晓栋(1980—),男,硕士,讲师,研究方向:船舶与机电工程技术、智能控制与检测。E-mail:opo2625@126.com
中图分类号:TP29
文献标志码:A
文章编号:1007-9580(2016)03-060-05
