基于改进下垂控制的微电网运行控制研究
2016-07-18陈丽娟王致杰
陈丽娟,王致杰
基于改进下垂控制的微电网运行控制研究
陈丽娟,王致杰
(上海电机学院,上海 201306)
微电网中,采用下垂控制的微电源,线路阻抗差异、输出电压幅值不等以及微电网复杂结构等因素均会导致微电源输出无功功率不能达到均分的效果,使微电源间出现无功环流。为解决这一问题,提出了一种改进的下垂控制策略。即在传统无功下垂控制中加入线路压降和微电源接入点电压幅值反馈量作为无功下垂控制的补偿量,有效跟踪微电网电压变化,改善输出电压幅值不等的状况。在Matlab/Simlink中搭建微电网仿真模型。仿真结果表明,改善的下垂控制能够大大提高无功均分的分配精度,提高微电网的系统稳定性。
微电网;下垂控制;无功环流;线路压降;电压幅值反馈;无功均分
0 引言
微电网作为分布式电源的有效载体,可以运行在孤岛、负荷突变、并网以及两种运行状态切换的四种运行状态下,不管是并网模式还是孤岛模式,在维持电压和频率稳定的基础上实现平分负荷[1],以及在运行模式切换过程中保证频率和电压在可接受的范围之内,是微电网运行控制关键问题的难点和重点。
当今,下垂控制已广泛应用于微电网中[2],特别是在对等控制的微电网中,但是传统的下垂控制由于线路阻抗的差异、输出电压幅值不等及微电网复杂结构等因素使DG输出的无功难以达到均分的效果[3-5],情况严重时,微电源之间可能会产生较大的无功环流[6]。国内外学者已对此进行了一系列研究,文献[7]设计了逆变器基波和谐波的分频下垂控制器,有效抑制电压谐波,而且也能依照容量合理分配基波域和谐波域的功率,从而提高逆变器并联时功率分配精度;文献[8]在传统的下垂控制中加入负荷端的电压幅值反馈,来提高负荷分配精度,但是该方法需要的无功下垂系数比较大,对系统的稳定性不利;文献[9]将电压回复控制及无功补偿引入到传统的下垂控制中,来提高无功功率分配精度和修正/曲线的电压偏差;文献[10]将虚拟阻抗技术引入传统的下垂控制中,将虚拟电抗加入到分布式电源逆变器的输出侧使其输出阻抗呈感性,然后修正/曲线,最终达到提高无功分配精度的效果,但是引入虚拟阻抗会使系统电压下降,对输出的电压质量产生不利影响;文献[11]采用基于动态虚拟阻抗的改进控制,使虚拟阻抗值能够自适应调整取值,降低线路电压降落,抑制无功环流;文献[12]在/下垂控制中加入无功功率偏差作为扰动,然后采用此扰动调节各微电源的下垂控制,达到减小无功分配误差的目的,但是此方法会引起系统频率的波动,对电能质量产生不利影响;文献[13]提出用虚拟阻抗来减小各微电源输电线路阻抗的不同,从而提高微电源对无功负荷的分配精度,但仍不能从根本上解决这个问题。所以急需找出一种既不影响电能质量,又不会对微电网系统稳定性产生不利影响的提高无功分配精度的有效方法。
本文针对这一问题,在传统无功下垂控制中加入传输线路压降和微电源接入点电压幅值反馈量作为无功下垂控制的补偿量,有效跟踪微电网电压变化,改善输出电压幅值不等的状况,既能提高系统稳定性,改善电能质量,又能达到提高无功均分精度的效果。
1 逆变器下垂控制策略
1.1 逆变器整体控制策略
采用下垂控制的逆变器整体控制方式如图1所示:逆变器输出的电压和电流经过功率计算、功率下垂控制、电压和电流双环控制得到控制逆变器输出的SPWM波,最终达到控制逆变器输出的目的。
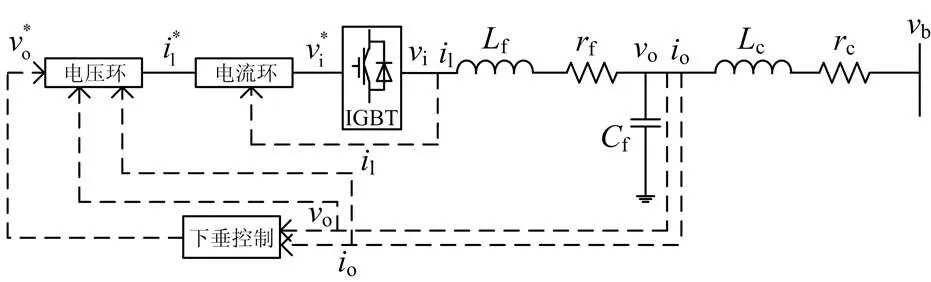
图1 采用下垂控制的逆变器整体控制方案
本文中逆变器采用电压电流双环控制,使逆变器有较好的电压源外特性,电压环能够快速跟踪由功率下垂控制产生的参考电压0,电流环用来进一步改善系统动态响应。
基于下垂控制的逆变器在微电网系统模式切换的过程中可以维持逆变器电压控制的基本策略不变,易于微电网实现并网转孤岛的切换。实际中可以直接断开微电网的静态开关实现并网转孤岛的操作,各逆变器根据下垂曲线和本地负荷进行微电网电压频率和电压幅值的调整。
1.2 传统下垂控制原理
下垂控制主要应用于对等控制结构的微电网中多个逆变器并联运行的控制。下垂控制能够在微电源输出阻抗为感性时实现//的解耦。
其两个逆变器的并联的等效电路如图2所示,其中逆变器等效为电压源。

图2 逆变器的并联等效电路
当逆变器的等效输出阻抗为感性时,且由于与负载阻抗相比,逆变器的等效输出阻抗以及线路阻抗均较小,而且在实际情况中相角偏差δ均较小,即可认为sinδ=,cosδ=1,则DG输出的有功功率和无功功率分别为:

传统的逆变器下垂特性公式为:
(2)
式(2)中,pq分别为/和/的下垂控制系数,00分别是微电源在空载时频率及电压幅值,也就是//下垂曲线的初值,分别为微电源频率和电压幅值的控制量,为微电源有功功率和无功功率的实际测量值。
将式(2)代入式(1)中可得到:

在微电网中,输电线路一般呈阻性或阻感性,但是控制器直接调整的是逆变器输出端口的电压,而不是滤波器的出口电压,故在考虑逆变器输出特性时,应将滤波器和变压器阻抗也考虑在内。又由于微电网的传输线路较短,再加入滤波器和变压器阻抗后,逆变器的输出阻抗仍然呈感性,故可以忽略线路电阻。
将滤波和变压器电抗以及线路电抗统一称为分布式微电源输出侧电抗。由式(3)可知,微电源输出的无功与输出侧电抗x、空载电压幅值0、公共母线电压以及/下垂控制系数k有关。
2 改进的下垂控制
由于微电源逆变器的输出LC滤波器的电感较大,而且在微电网中的输电线路较短,故微电源的输出阻抗仍然呈感性。因此,//下垂控制在微电网中仍然适用[14]。
又由式(3)可得:

另外,为弥补微电网中微电源接入点电压幅值的差异,在传统的无功下垂控制中加入微电源接入点电压幅值反馈控制同样作为无功下垂控制的补偿量,有效跟踪接入点电压变化,改进后的无功下垂控制结构如图3所示。

图3 改进的无功下垂控制结构
图3中,nn为微电源输出功率和电压幅值的额定值,为微电源实际输出的无功功率,q为微电源无功下垂控制系数,m为微电源接入点电压幅值,为微电源无功下垂控制输出的参考电压,为微电源输出等效感抗,微电网电压补偿量和幅值反馈量经过PI调节得到无功下垂曲线初值的补偿量Δ,平移下垂曲线,如图4所示,调节系统稳定运行点,最终使各微电源输出的电压幅值相同。
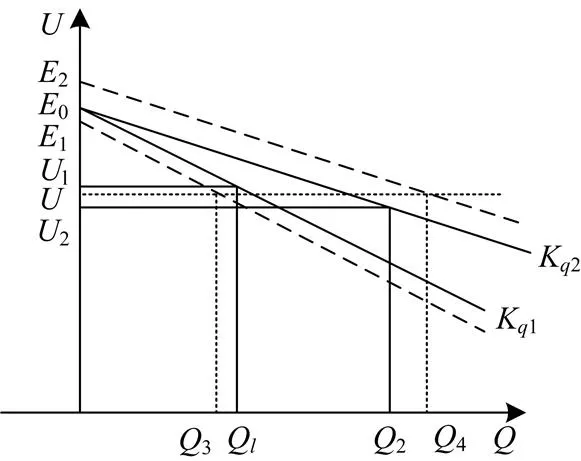
图4 下垂曲线平移示意图
图4中,实线为改进前无功下垂曲线,12为分布式电源1、2的实际电压幅值,为微电网电压幅值,0为微电源空载电压,12分别为下垂曲线改进前分布式电源1、2的输出功率;虚线为改进后的下垂曲线,1,2为加入微电网电压幅值反馈后的下垂曲线初值,12分别为下垂曲线改进后分布式电源1、2的输出功率。由此可看出,经过改进后的无功下垂控制,可改变分布式电源输出的无功功率,使微电网中各分布式电源输出电压的幅值相同。
3 并网同步控制
微电网在孤岛运行模式与并网运行模式进行切换时,需要快速实现静态开关两侧电压幅值、频率及相位基本一致,即微电网与大电网达到同步运行状态,从而减小并网时的冲击[15-16]。
本文利用微电网模式切换控制器对静态开关两侧的电压信号进行测量,计算得到电压幅值差、频率差和相角差这些差值进行微调,并根据电网电压、频率控制以及相位控制,来实现微电网孤岛运行模式到并网运行模式的平滑切换。微电网并网的预同步控制框图如图5所示。
图5中,孤岛转并网的模式切换控制通过电压、频率控制和相位控制获得相应的频率和电压幅值初值改变量,再通过平移后的下垂曲线得到最终的电压、频率和幅值参考值。在并网前,首先同时合并S1、S3,启动频率和电压控制,在0.1 s后合并S2,启动相位控制,使 PCC 两端的相位差、电压幅值差渐渐缩小直到其达到并网运行条件的范围内[17],最后闭合PCC处的断路器,从而实现孤岛运行模式到并网运行模式的切换。

图5 并网同步控制结构
4 仿真分析
为验证改进的下垂控制的有效性,在Matlab/Simulink中建立微电网仿真模型,仿真模型的简化结构如图6所示,该微电网由3台微电源组成,大电网采用理想的三相电压源等效,PCC为分布式微电网并网开关。

图6 微电网简化结构
微电网系统的控制参数如表1所示,表中分布式/,/下垂系数根据分布式电源的额定输出功率来设置,且三个分布式电源的下垂系数与其额定功率成比例设置;另外,为了确保在控制时各分布式电源间无环流,三个分布式电源的空载频率和空载电压需相同。

表1 微电网系统控制参数
微电网整体Simulink仿真模型如图7所示。

图7 微电网整体Simulink仿真模型
微电网的仿真过程为:(1) 1 s前,微电网孤岛运行;(2) 1 s时,微电网负荷发生突变,总的有功负荷由50 kW增加到60 kW,无功负荷由10 kvar增加到13 kvar;(3) 1.5 s时启动电压和频率控制模块,1.6 s启动相位控制模块,微电网与大电网进入预同步控制阶段,当满足并网条件式,微电网并网;(4) 3 s时,断开PCC开关,微电网由并网运行模式切换到孤岛运行模式。
改进前后微电网输出有功如图8、图9所示。
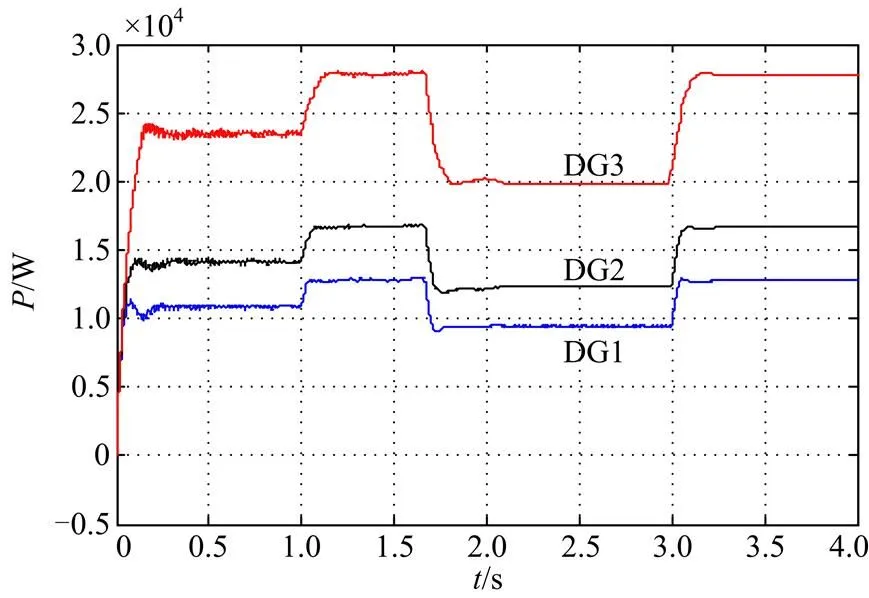
图8 改进前微电网输出有功功率
由图8、图9可看出,无论是无功下垂控制改进前还是改进后,微电网中各微电源均可按照有功下垂系数比例分配有功负荷。
改进前后微电网输出无功功率如图10、图11所示。

图9 改进后微电网输出有功功率
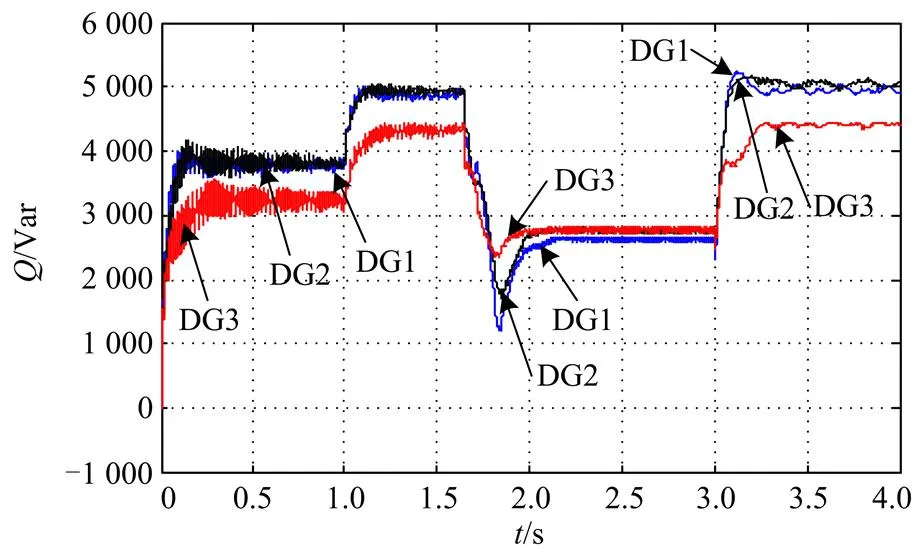
图10 改进前微电网输出无功功率

图11 改进后微电网输出无功功率
由图10、图11 可看出,由于线路阻抗的存在,微电网输出的无功功率大于无功负荷功率。在无功下垂控制改进前,各分布式电源输出的无功功率明显不按无功下垂系数比例分配,而在无功下垂控制改进后,由图11可看出:
(1) 0~1 s微电网孤岛运行时,分布式电源输出无功功率比例为:3/2≈5400/3000=1.80,3/1≈ 5400/2500=2.16,2/1≈3000/2500=1.20;
(2) 1~1.5 s,微电网孤岛运行且负荷突变后且在并网预同步控制前:3/2≈7100/3900=1.82,3/1≈ 7100/3200=2.22,2/1≈3900/3200=1.22;
(3) 2~3 s,微电网进入并网运行模式且稳定后,3/2≈3600/1900=1.89,3/1≈3600/1500=2.4,2/1≈1900/1500=1.27;
(4) 3~4 s,微电网再次转换为孤岛运行后,3/2≈7100/3900=1.82,3/1≈7100/3200=2.22,2/1≈3900/3200=1.22;
而无功下垂系数比例为:k2/k3=0.668/0.4= 1.67,k1/k3=0.8/0.4=2.00,k1/k2= 0.8/0.668=1.197,由此可看出:虽然无功下垂控制改进后仍未按照无功下垂系数比例分配无功负荷,但分配精度已大大提高,从而验证了改进的有效性。
但是由图10、图11可看出在微电网由孤岛运行模式和并网运行模式切换时,系统会出现严重的无功功率缺额,需要通过本地无功补偿设备和功率控制器来进行快速补偿。
6 结论
采用下垂控制的微电源,线路阻抗差异、输出电压幅值不等以及微电网复杂结构等因素均会导致不能合理分配无功负荷,进而导致各微电源间出现无功环流。本文根据负荷电压幅值的下垂特性,通过在无功下垂控制中加入传输线路压降和微电源接入点电压幅值反馈的方法,使微电网运行达到稳态时各微电源输出电压幅值相同,从而提高微电源的无功负荷分配精度,微电网系统的稳定性得到提高。
[1] 吴翔宇, 沈沉, 赵敏, 等. 基于公共母线电压的微电网孤网运行下垂控制策略[J]. 电工技术学报, 2015, 30(24): 135-141.
WU Xiangyu, SHEN Chen, ZHAO Min, et al. A droop control method based on PCC bus voltage in islanded microgrid[J]. Transactions of China Electrotechnical Society, 2015, 30(24): 135-141.
[2] 王成山, 武震, 李鹏. 微电网关键技术研究[J]. 电工技术学报, 2014, 29(2): 1-12.
WANG Chengshan, WU Zhen, LI Peng. Research on key technologies of microgrid[J]. Transactions of China Electrotechnical society, 2014, 29(2): 1-12.
[3] LI Y W, KAO C N. An accurate power control strategy for inverter based distributed generation units operating in a low voltage microgrid[J]. IEEE Transactions on Power Electronics, 2009, 24(12): 2977-2988.
[4] LOPES J A P, MOREIRA C L, MADUREIARA A G. Defining control strategies for microgrids islanded operation[J]. IEEE Transactions on Power Systems, 2006, 21(2): 916-924.
[5] 徐玉琴, 马焕均. 基于改进下垂控制的逆变器并联运行技术[J]. 电力系统保护与控制, 2015, 43(7): 103-107.
XU Yuqin, MA Huanjun. Parallel operation technology of inverters based on improved droop control[J]. Power System Protection and Control, 2015, 43(7): 103-107.
[6] IYER S V, BELUR M N, CHANDORKAR M C. Analysis and mitigation of voltage offsets in multi-inverter microgrids[J]. IEEE Transactions on Energy Conversion, 2011, 26(1): 354-363.
[7] 刘海涛, 吕志鹏, 苏剑, 等. 具有功率精确分配能力的逆变器电压谐波分频下垂控制方法研究[J]. 电力系统保护与控制, 2015, 43(19): 9-14.
LIU Haitao, LÜ Zhipeng, SU Jian, et al. Design of voltage harmonic frequency droop controllers for inverter with accurate load sharing function[J]. Power System Protection and Control, 2015, 43(19): 9-14.
[8] 艾欣, 金鹏, 孙英云. 一种改进的微电网无功控制策略[J]. 电力系统保护与控制, 2013, 41(7): 147-155.
AI Xin, JIN Peng, SUN Yingyun. An enhanced reactive sharing control strategy of microgrid[J]. Power System Protection and Control, 2013, 41(7): 147-155.
[9] 韩华, 刘尧, 孙尧, 等. 一种微电网无功均分的改进控制策略[J]. 中国电机工程学报, 2014, 34(16): 2639-2648.
HAN Hua, LIU Yao, SUN Yao, et al. An improved control strategy for reactive power sharing in microgrids[J]. Proceedings of the CSEE, 2014, 34(16): 2639-2648.
[10] 黄春燕. 引入虚拟电抗的独立运行微电网改进下垂控制[J]. 江苏电机工程, 2014, 33(4): 39-43.
HUANG Chunyan. Improved droop control based on virtual impedance for isolated microgrid[J]. Jiangsu Electrical Engineering, 2014, 33(4): 39-43.
[11] 闫俊丽, 彭春华, 陈臣. 基于动态虚拟阻抗的低压微电网下垂控制策略[J]. 电力系统保护与控制, 2015, 43(21): 1-6.
YAN Junli, PENG Chunhua, CHEN Chen. Droop control strategy based on dynamic virtual impedance in low-voltage microgrid[J]. Power System Protection and Control, 2015, 43(21): 1-6.
[12] HE J W, LI Y W. An enhanced microgrid load demand sharing strategy[J]. IEEE Transactions on Power Electronics, 2012, 27(9): 3984-3995.
[13] JOSEP M G, JUAN C V, JOSE M, et al. Hierarchical control of droop-controlled AC and DC microgrid-a general approach toward standardization[J]. IEEE Transactions on Industrial Electronics, 2011, 58(1): 158-171.
[14] GUERRERO J M, VASQUEZ J C, MATAS J, et al. A control strategy for flexible microgrid based on parallel line-interactive UPS systems[J]. IEEE Transactions on Industrial Electronics, 2009, 56(3): 726-736.
[15] 唐西胜, 邓卫, 齐智平. 基于储能的微网并网/离网无缝切换技术[J]. 电工技术学报, 2011, 26(1): 279-284.
TANG Xisheng, DENG Wei, QI Zhiping. Research on grid-connected/islanded seamless transition of microgrid based on energy storage[J]. Transactions of China Electrotechnical Society, 2011, 26(1): 279-284.
[16] 徐瑞林, 徐鑫, 郑永伟, 等. 基于改进下垂控制的微网运行控制策略[J]. 电力系统及其自动化学报, 2012, 24(6): 15-19.
XU Ruilin, XU Xin, ZHENG Yongwei, et al. Improved droop control scheme for micro-grid operation[J]. Proceedings of the CSU-EPSA, 2012, 24(6): 15-19.
[17] 高晓芝, 李林川, 张蕾. 含电压源型逆变器和同步电机接口的微网控制[J]. 电力系统保护与控制, 2012, 40(23): 145-150.
GAO Xiaozhi, LI Linchuan, ZHANG Lei. Microgrid control with voltage source inverter interface and synchronous generator interface[J]. Power System Protection and Control, 2012, 40(23): 145-150.
(编辑 周金梅)
Research of operation control of micro-grid based on improved droop control
CHEN Lijuan, WANG Zhijie
(Shanghai Dianji University, Shanghai 201306, China)
In the micro-grid, the output reactive power of distributed generations which adopt droop control strategy couldn’t be arranged in average, because of their line impedance differences, the different output voltage amplitude and complex structure of micro grid and other factors. These could lead to reactive circulating current in distributed generations. To solve the problem, this paper proposes an improved droop control strategy. It adds the voltage drop of line, voltage amplitude feedback as an compensation amount of reactive power droop control in the traditional power droop control in order to effectively track the changes of micro-grid voltage and improve the status of the different voltage amplitude. It establishes the micro-grid simulation model in Matlab/Simulink. And the simulation results show that the improved droop control can greatly improve the distribution accuracy of reactive power sharing and enhance the stability of the micro-grid system.
This work is supported by National Natural Science Foundation of China (No. 11304200), Natural Science Foundation of Shanghai (No. 14ZR1417200 and No. 15ZR1417300), and Innovation Fund Project of Shanghai Municipal Education Commission (No. 14YZ157 and No. 15ZZ106).
micro-grid; droop control; reactive circulating current; voltage drop of line; voltage amplitude feedback; reactive power sharing
10.7667/PSPC151113
国家自然科学基金(11304200);上海自然科学基金(14ZR1417200,15ZR1417300);上海市教委创新基金项目(14YZ157,15ZZ106)
2015-06-30;
2015-10-09
陈丽娟(1989-),女,硕士,研究方向为微电网的运行与控制;E-mail: chenlijuancom@163.com
王致杰(1964-),男,教授,硕士生导师,研究方向为智能控制与故障诊断。E-mail: wzjsdstu@163.com