基于分级信息融合的引信多模融合*
2016-07-16崔雨勇
崔雨勇
(中国西南电子技术研究所,成都 610036)
基于分级信息融合的引信多模融合*
崔雨勇**
(中国西南电子技术研究所,成都 610036)
摘要:为了提高引信的准确性, 结合当前微型毫米波雷达、激光传感器、微机电系统(MEMS)传感器对目标的探测能力,提出了一种引信多模融合策略。以传感器受环境影响的主要因素为输入,构建环境影响贝叶斯网络,形成传感器可靠性权重分配;通过建立传感器量测加权融合,形成测距与加速度两级融合综合处理获得目标准确位置信息,从而提高量测可靠性,为准确引爆提供支撑。实验表明该算法可提高测距准确性且对不同环境具有较好的适应性。
关键词:引信;毫米波雷达;激光测距;多模融合;微机电系统
1引言
现代战争对打击目标提出了精确性的要求,特别是最近十几年来爆发的几次大规模战争中,精确打击的要求越来越高[1]。精确打击的保障是引信系统的可靠性。随着微系统技术的发展,炮弹引信数据源可以采用毫米波雷达(Millimeter Wave Radar,MMWR)、激光测距传感器(文中简写为Las)、微机电系统(Micro-Electro-Mechanical System,MEMS)加速度测速仪器。由于其对应不同的引爆模式,以前单独使用,随着研究的深入,综合采用多传感器完成综合引爆成为工作的重点[2-3]。
随着微系统技术研究的深入,价格低廉、获取方便的炮弹传感器不断增多,为提高炮弹引信的可靠性提供了可能。炮弹引信信息融合的目的是为提供可靠的引爆策略提供支撑,根据不同的引信平台及目标差异,通过对三种测量手段的测量量如目标位置、速度信息、加速度信息进行融合分析,将量测统一表征[4-5],便于提高炮弹引信的准确性以及通过融合提高抗干扰能力。其处理过程在炮弹发射后,能够采用MEMS的过顶判决,提供时延准确性,特别是对不同的爆炸要求提供不同的工作模式。如果要求具备爆炸时延,则可以通过激光测距和毫米波测距信息进行连续的距离信息获取。由于距离信息获取中两种传感器受干扰的因素不一样,通过提供接近目标距离形成对目标高度判断,特别是在环境恶劣情况下,激光对电磁干扰具有较好的抗干扰特性,而毫米波雷达对天气变化不敏感的特点,形成对目标位置的准确判断,因此可以通过信息处理手段,为引信系统提供较高的可靠性,从而保证多模引信可以满足多种战术战法的需求,提高命中率和战场生存能力。通过对其数据进行数据关联和估计,滤波后完成数据融合形成统一描述,从而有效完成其数据处理并提高精度。
本文从多种传感器探测信息的特征入手,引入其影响决策,通过该处理有效提高位置精度,最后通过加权信息融合,从而提高引信引爆的精度。
2多模信息融合分析
2.1数据源分析
MEMS传感器作为一种微型测量加速度装置,其加速度值可以表示为
(1)

MEMS测量加速度值是对其实时加速度值的度量,根据其工作原理,易知其受温度影响较大。
对于目标位置的描述,为了更加精确,引入毫米波雷达与激光测距信息。毫米波雷达测量获取目标连续位置信息,激光测距对目标信息获取也是距离信息,其测距原理不同,但是其测距的精度相当。激光测距易受天气环境影响,而毫米波雷达受影响因素主要是电磁环境。以上两种传感器都是当前炮弹引信引爆信号产生的常用测量手段。
针对其信息测量不同,毫米波雷达与激光测距信息可表示为

(2)

(3)

综合考虑以上几种传感器测量信息的不同,通过信息融合可以提高其环境适应性及引爆的准确性。
2.2位置信息与加速度信息统一
位置信息与加速度信息是两种不同的描述目标运动状态的参量。为了对目标信息的描述统一,可进行如下处理。
加速度与位置的关系为
(4)
由上式可以看出,根据运动特征,MEMS加速度可通过瞬时位置信息的差分获得。如果可以获得精确的位置测量,那么MEMS与激光测距信息可以关联并形成融合位置。为了形成统一描述,将激光测距信息转换为加速值进行校正融合,形成比较准确的目标加速度信息,并根据加速度信息校正目标距离信息。为了达到该目的,需要对目标与加速度信息进行综合处理,其具体融合策略先考察环境信息。
2.3基于环境的置信度设置
由于炮弹引信信息融合的目的是为了提高引爆准确性,根据文献[6],通过小样本获取可靠的评价方法,本文通过将影响因素量化,假设MEMS、激光传感器、毫米波雷达的主要影响因子为
{XMEMS,Xlas,XMMWR},
(5)
则构建其主要环境影响的贝叶斯网络,通过贝叶斯网络训练推理获取其可信度,如图1所示。
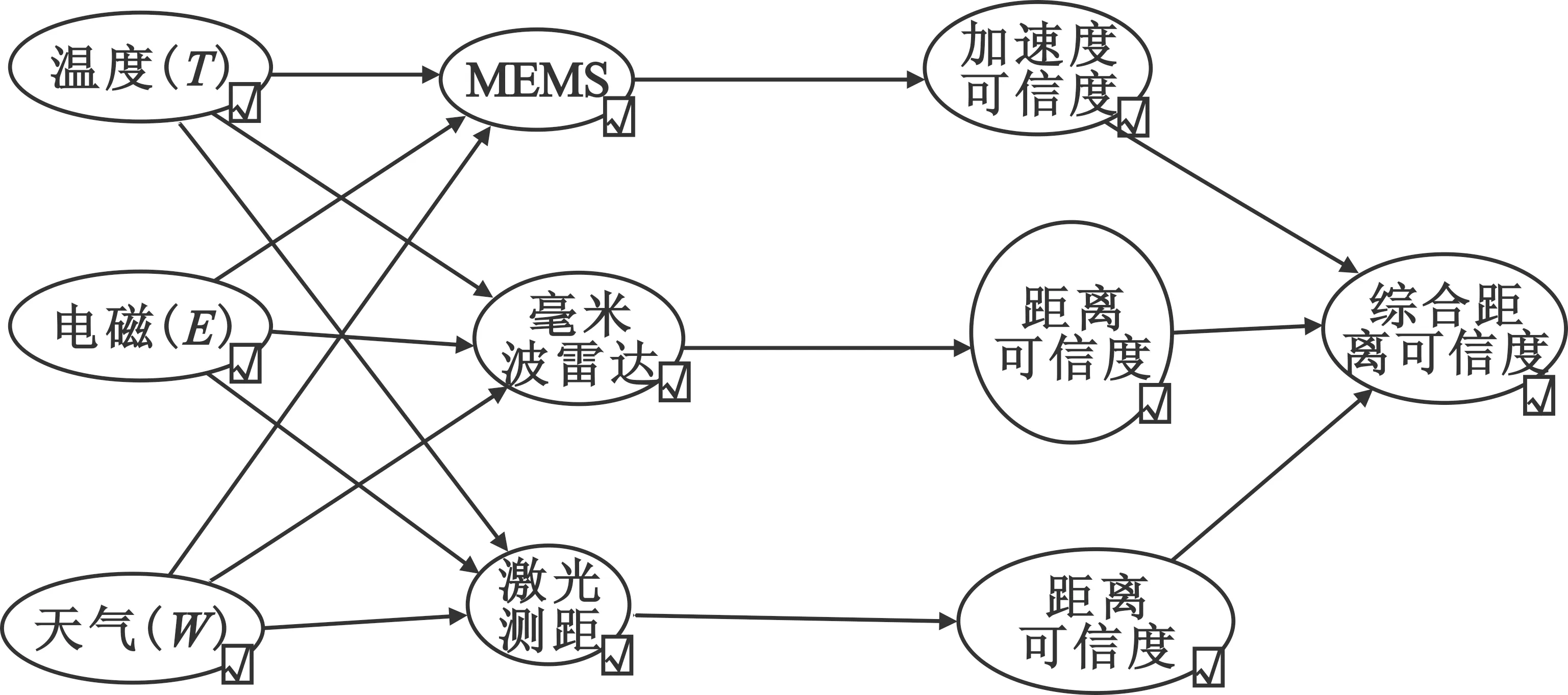
图1 环境影响贝叶斯推理模型
温度T的输入依靠温度传感器,温度传感器获取的弹体温度进行量化如下:
(6)
电磁环境的变化对毫米波雷达影响较大,该值通过对雷达测量值的均方根进行表征:
(7)
天气影响是对具体时刻固定的,具体到某一天天气情况固定,因此设定如下:
(8)
对以上3种主要影响因素量化形成贝叶斯网路的推理输入,同时建立贝叶斯影响矩阵(该矩阵影响为多次试验获取结果),根据3种传感器长期工作环境影响近似得到其影响因子:
(9)
针对具体的环境影响,则需要根据实际的情况进行实时解算。在工程实践中,通过预先加载初值,再根据实时量测值进行影响因子更新。
2.4测距信息融合
根据信息测量的差异,首先对激光测距与毫米波雷达测距信息进行融合,其融合过程考虑环境可靠性的影响,因为其有助于评估距离测量量的可信程度。距离的可靠性融合误差采用多重指标考核:
(10)
(11)
式中:δi、δj分别表示不同传感器的标准差,该误差水平反映了传感器测量的准确性;Xi、Xj为第i、j个传感器的环境置信度,环境置信度的引入为传感器误差的精确度量提供依据。
根据以上准则,获取融合值后,与MEMS加速度信息进行融合。设t时刻的测距加速度值为

(12)
则根据信息融合理论进行加速度融合,从而确定目标位置信息。


(13)
由于MEMS测量值也受环境影响,因此其中的Xi、Xj分别表示MEMS的环境置信度与融合数值的环境置信度。
根据以上知识,则其具体算法如图2所示。
图2 弹载多模融合流程
具体流程描述如下:
(1)根据当前环境,评价各种传感器工作的适应性,根据传感器工作条件获得其环境置信度;
(2)获取激光测距信息及毫米波雷达距离信息,并对距离信息进行加权融合处理;
(3)针对距离融合信息进行差分计算,获得其加速度信息;
(4)针对融合加速度与MEMS进行加权融合处理;
(5)根据融合加速度计算得到目标融合位置信息。
3实验结果
为了说明问题,本文采用模拟炮弹轨道算法进行炮弹轨道模拟。由于炮弹飞行具有多个阶段,本系统的融合作用主要体现在末段跃升俯冲阶段的模拟。运动方程如下:
(14)
式中:θ为各个时刻的俯仰角;g为重力加速度;nx、ny为解算的实时运动轨迹的速度法向值。
具体传感器测量信息采用实时模拟解算算法得到。MEMS、激光测距、毫米波雷达测距的工作条件为:环境温度25℃,电磁环境良好,晴天情况下进行测试,实时量测数据误差信息假设服从0均值、σ方差的正态分布。假设炮弹发射时间为500点,坐标为(500,3 000)m,爆炸点为(2 600,4)m,其轨迹如图3所示,在飞行过程中激光测距和毫米波雷达测距距离变化以及两者融合距离如图4所示。MEMSZ轴加速度量测值、毫米波雷达与激光测距获得的加速度值及两者融合值如图5所示,图6为局部放大图。毫米波雷达与激光测距的融合加速度、MEMS加速度与前两者融合加速度融合得到的距离信息以及该距离信息进一步与毫米波雷达、激光传感器的距离量测融合结果如图7所示,其误差分析分析如图8所示。
图3 弹道轨迹
图4 距离测量及融合
图5 加速度融合曲线
图6 加速度融合局部放大图
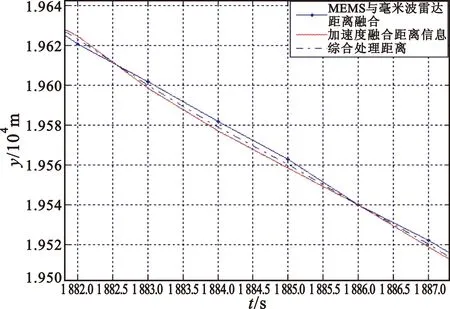
图7 综合处理距离信息
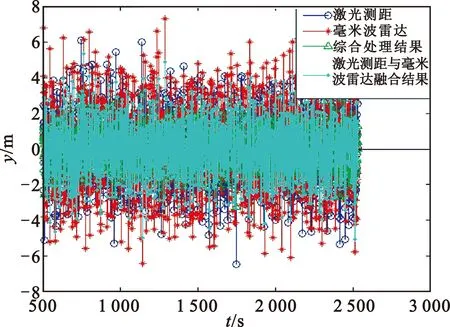
图8 误差分布曲线
根据以上测量结果,分别计算其协方差矩阵,得到的误差为MEMS标准差0.1,激光测距的误差标准差5,毫米波雷达测距的标准差3。
从图4~7可以看出本文方法中距离信息、加速度信息可以通过变换进行融合。由于本文假定其初始化后温度及电磁环境、天气情况不变,因此其运行后误差变化将不受环境影响。本文仿真首先将毫米波雷达与激光测距信息进行融合,其融合后的距离信息通过变换获取实时加速度信息后再与MEMS加速度信息融合,最后统一生成距离信息。从图6可以看出加速度量测随时间的波动较大,通过融合,误差水平降低,同时其波动信息减少,有助于提高加速度测量值的精度,特别是温度变化剧烈时,该作用将更加明显。从图8可以看出综合处理距离信息量测误差水平比单传感器误差及两传感器融合误差均小,可以证明本文融合方法的有效性。根据仿真实验,在环境不变情况下,具体误差水平及时效性如表1所示。
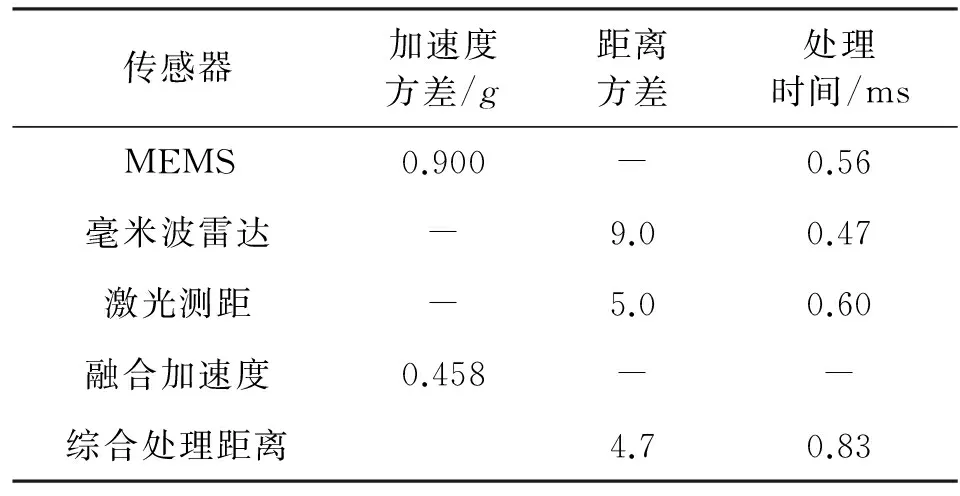
表1 精度分布表(g=9.8 m/s2)
由表1可知,综合处理的距离精度方差比毫米波雷达与激光测距的误差都小。这是由于考虑了MEMS加速度信息,同时加入了环境影响因子,通过加权融合保证了误差处于较小的水平,其处理时间满足1 ms的要求,同时具有一定的处理时效性。这种多模式攻击有效地提高了爆炸精度。
在实际中,由于单传感器的使用,炮弹受环境影响往往出现打不中或偏离的情况,采用该方法则可提高命中率。
4结束语
随着微系统技术的发展,炮弹装载多种传感器成为可能。本文结合炮弹引信目前传感器使用情况进行综合分析,提出了一种结合环境参数的多传感器加权信息融合算法完成信息量测,获取其精确测量的位置,有效提高其量测准确性。毫米波雷达、激光测距、MEMS传感器的综合使用有效改善了炮弹的打击精度。鉴于炮弹的特殊性,考虑炮弹传感器多种测量的有效融合和不同引爆情形下的融合策略,以及弹道本身特点及环境适应性,是今后研究的重点。
参考文献:
[1]BASSEM R,MAHAFZA D,ELSHERBENI Z.MATLAB simulations for radar systems design[M ].New York:Chapman & Hall/CRC Press LLC,2004.
[2]李枭.激光引信高精度高频率脉冲测距技术[D].南京:南京理工大学,2013.
LI Xiao.High precision and high frequency pulse laser fuze ranging technology[D].Nanjing:Nanjing University of Science and Technology,2013.(in Chinese)
[3]吴建峰,何广军,雷虎民.地杂波引起的引信早炸问题研究[J].空军工程大学学报(自然科学版),2010,11(2):42-46.
WU Jianfeng,HE Guangjun,LEI Humin.Research on early burst of the fuse caused by ground clutter[J].Journal of Air Force Engineering University(Natural Science Edition),2010,11(2):42-46.(in Chinese)
[4]崔占忠,宋世和.近感引信原理[M].北京:北京理工大学出版社,1998.
CUI Zhanzhong,SONG Shihe.The principle of proximity fuze[M].Beijing:Beijing University of Technology Press,1998.(in Chinese)
[5]LUO R C,KEY M G.Multisensor integration and fusion in intelligent systems [J] .IEEE Transactions on Systems,Man and Cybernetics,1989,19(5):901- 931.
[6]周利东,温玉全,王玮,等.引信可靠性小样本评估方法研究[J].北京理工大学学报,2010,30(7):761-770.
ZHOU Lidong,WEN Yuquan,WANG Wei,et al.Method of fuse reliability evaluation based on small size of sample[J].Transaction of Beijing Institute of Technology,2010,30(7):761-770.(in Chinese)
Multimode Fusion of Fuses Based on Hierarchical Information Fusion
CUI Yuyong
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
Abstract:In order to improve the accuracy of fuses,a multimode fusion method is proposed by considering the information obtained by miniature millimeter wave radar,laser sensors and micro-electro-mechanical system(MEMS) sensors.The environmental impact Bayesian network is established as the ratios of sensor impacted.Two layers of transform fusion is applied to fuse the information of distance and acceleration of object to improve the accuracy,so as to provide support for detonating fuze accurately.Experiments show that the algorithm can improve the accuracy of distance and has better adaptability to different environment.
Key words:fuze; millimeter wave radar; laser ranging; multimode fusion; micro-electro-mechanical system(MEMS)
doi:10.3969/j.issn.1001-893x.2016.06.013
收稿日期:2016-01-22;修回日期:2016-05-04Received date:2016-01-22;Revised date:2016-05-04
通信作者:44989183@qq.comCorresponding author:44989183@qq.com
中图分类号:TN911;TP212.9
文献标志码:A
文章编号:1001-893X(2016)06-0670-05
作者简介:

崔雨勇(1983—),男,山西襄汾人,2012年获博士学位,现为工程师,主要从事计算机视觉与信息处理。
CUI Yuyong was born in Xiangfen,Shanxi Province,in 1983.He received the Ph.D. degree in 2012.He is now an engineer.His research concerns computer vision and information analysis.
Email:44989183@qq.com
引用格式:崔雨勇.基于分级信息融合的引信多模融合[J].电讯技术,2016,56(6):670-674.[CUI Yuyong.Multimode fusion of fuses based on hierarchical information fusion[J].Telecommunication Engineering,2016,56(6):670-674.]