基于云雷达的大气0 ℃层亮带识别
2016-07-16谢丽萍王德旺黄宁立欧建军
谢丽萍,王德旺,黄宁立, 谢 潇,刘 飞,欧建军
(上海海洋中心气象台,上海 201306)
基于云雷达的大气0 ℃层亮带识别
谢丽萍,王德旺,黄宁立, 谢潇,刘飞,欧建军
(上海海洋中心气象台,上海201306)
摘要:为了研究8.6 mm云雷达探测大气0 ℃层亮带的能力,利用中国气象科学研究院灾害天气国家重点实验室的车载8.6 mm多普勒偏振云雷达(HMBQ)2008—2012年共计2 063次观测个例,分析云雷达在不同天气形势下的反射率因子、径向速度、线性退偏振因子在0 ℃层附近的变化特征,改进了一种通过云雷达探测产品反演大气0 ℃层高度的方法。研究表明:8.6 mm云雷达能够在无降水云、弱降水云、小雨、中雨甚至大雨的天气形势下,对大气0 ℃层进行观测,而且探测的0 ℃层亮带变化特征显著,能弥补常规天气雷达在夏季短时强对流、对流单体等小尺度天气预警业务中相关资料的不足。
关键词:云雷达;探空数据; 0 ℃层高度
引言
早期将雷达资料应用于天气学的相关研究中,雷达反射率因子回波图中的0 ℃层亮带特征一直都是研究热点,因为它与雷达定量估测降水、大气中的粒子属性等密切相关,在反演0 ℃层高度以及验证卫星估测降水方面也非常重要[1-4]。在大气0 ℃层附近,雷达反射率因子有一个明显的增加区域,称之为“亮带”。它表明在大气云层中存在明显的冰水转换区,即0 ℃层亮带高度以上的水凝物以冰晶、雪花为主;粒子在下落过程中,由于大气环境温度升高,粒子相态开始发生改变,至少粒子出现一层外包水膜,小的冰相湿粒子聚合成大的液相水滴粒子,开始形成液水以及雨滴等液相粒子,由于粒子形状、相态、介电常数、大小等共同作用的结果导致雷达反射率因子较大[5-6]。“亮带高度”是指在0 ℃层亮带中雷达反射率因子最大值所在的高度;“融化高度”是指融化层的顶部,一般认定其为0 ℃等温线所在的高度,冰相粒子开始融化的位置[7-8]。
国外,气象学者利用云雷达探究0 ℃层亮带的工作开展得很早。Kenneth等[9]把存在固有误差的模式预报融化层高度作为输入量,引进亮带订正理论进行分析,同时将结果与垂直观测的3.2 mm云雷达观测数据中反射率“渐增”的区域进行比较,发现毫米波雷达在0 ℃层区域并没有“亮带”。 Pasqualucci等[10]利用激光雷达和三波长雷达(3.2 mm,8.6 mm,10.6 cm) 对0 ℃层亮带区域进行观测,发现只有10.6 cm雷达有明显亮带现象;8.6 mm雷达只是探测到间歇性亮带;由于瑞利散射不占主导作用,3.2 mm雷达没有探测到明显的亮带特征。分析还表明相对不明显的“暗带”特征是因为:在0 ℃层亮带中,大的雪花粒子表面是水膜,导致非瑞利散射特征较强。激光雷达探测到的“暗带”表征0 ℃层亮带区域中混合相态粒子集中,聚合的雪花粒子破碎成小雨滴。云雷达因其对小粒子甚至细微粒子的超高敏感性及探测参量的高时空分辨率(几十米的空间分辨率,小于1 s的时间分辨率),对于大气云层的形成演变过程监测、灾害天气过程预警、大气水凝物相态以及大气云层内部微物理场等相关业务应用方面的潜力值得研究,是对大气中广泛存在的卷云、积云、层云等的理想探测工具[11-15]。
国内云雷达相关科研工作起步相对较晚,中国气象科学研究院灾害天气国家重点实验室研发了具有偏振和多普勒功能,波长为8.6 mm的云雷达(HMBQ),仲凌志等[16-18]利用该部雷达对大气云冰云水含量、台风外围云系的动力特征等进行研究,并与Sa波段雷达进行对比发现,云雷达能够探测到更为精细的云和弱降水回波,雷达反射率因子和退偏振因子参量的垂直变化结构对于水凝物相态的演变有指示意义,径向速度和速度谱宽能够表征层状云的垂直运动以及强湍流效应。孙晓光等[19]利用云雷达探测到的反射率因子和退偏振因子的距离高度显示(Range Height Indicator,RHI)扫描数据,通过计算两者的垂直廓线,利用约束条件以及参量的相关性,获取融化层区间,分析2个参量的敏感性,发现只要反射率因子或者退偏振因子2个参量中的一个表征出明显的亮带特性,该方法就能有效地提取0 ℃层亮带的高度。
本文在王德旺等[20]提出的方法基础上对通过云雷达探测产品反演大气0 ℃层高度的方法进行改进,获取更准确的大气0 ℃层亮带的时空变化特征。
1资料与处理方法
1.1云雷达
雷达探测产品包括:雷达反射率因子(R)、径向速度(V)、速度谱宽(W)以及退偏振因子(Ldr),其它详细参数参见文献[21]。该部雷达2008年5—9月在广东东莞(113.44°E、22.58°N,海拔高度43.4 m)参加“中国南方暴雨野外科学实验外场探测试验”、2009年4—5月在河北张家口(114.53°E、40.47°N,海拔高度725.8 m)联合飞机进行“云和降水过程试验”、2009年6—9月在广东珠海(113.35°E、22.17°N,海拔高度45.8 m)进行“亚热带暖云系和降水过程连续性观测试验”、2010年7月在天津(117.05°E、39.06°N,海拔高度3.8 m)观测、2010年8—9月在吉林伊通(125.17°E、43.21°N,海拔高度249.8 m)联合飞机进行“北方冬季层状云降水过程试验分析”、2012年5—8月参加“2013年青藏高原第三次科学试验水分循环观测与研究”项目,雷达观测点设置在云南省腾冲县气象局(98.3°E、25.01°N,海拔高度1 656 m)。
1.2探空数据
(1)常规探空数据:中国气象局常规业务观测站网的临近云雷达的探空数据(07:00和19:00,北京时,下同),选取离云雷达最近的探空站点的温度廓线作为验证资料,如果云雷达观测站点无探空数据,选取临近区域站点的探空数据作为对比资料。
(2)GTS1型数字式探空仪,观测方式:综合探测。数据保存类型有2种:第一种秒级数据(1 s),第二种固定垂直分辨率数据(100 m),探测参量有气温、气压、湿度、露点、温度露点差、虚温、风向、风速等。文中用到的是第二种数据格式的温度廓线,仅在2013年云南腾冲进行探空数据的加密观测,时间在13:00,与云雷达相距不超过20 m。
1.3探测参量的垂直廓线计算方法
雷达接收来自照射体积内所有目标的后向散射功率和多普勒频移,多普勒速度谱是粒子后向散射能量在速度上分布的概率密度函数。研究中所用到的参量包括雷达反射率因(R)、径向速度、谱宽(Wd)以及退偏振因子(Ldr),其中前3个量分别是多普勒谱的0阶、1阶以及2阶矩,公式详见文献[21]。
线性退偏振因子(Ldr)是雷达发射水平脉冲时接收到的垂直回波功率与水平回波功率的比值。当探测大气粒子的主轴与电磁波的电场方向不平行时,一部分能量以与发射极化波相同的极化状态返回,称为同极化波;另一小部分能量将会被退极化而以与发射极化波正交的极化状态返回,称为正交极化波。它与粒子的形状取向、空间取向以及介电特性有关,反映探测到的粒子对电磁波正交分量散射能量的大小,主要与水凝物形状、不规则程度、热力学相态、介电常数、在偏振平面的倾斜角以及水凝物空间取向等有关。对于水凝物中正在融化的霰丸和雪粒,退偏振因子是最佳的辨别参数,能够观测扁椭球粒子的下落模型,因为水滴比干雪粒子的介电常数大,外包水膜的湿粒子的Ldr观测值更大。在英国发生的大多数对流性降水,有明显亮带特征的同时,Ldr基本在-16 dB,说明存在雪粒子。如果没有显著亮带特征的降水过程,Ldr基本在-25 dB左右,说明存在霰丸粒子,这些特征值与理论上一致。因为2种冰相粒子在下落过程中,都受空气影响随机取向增长,其中湿雪粒子的平均轴比约0.5~0.6,而霰丸粒子的轴长比为0.8[22]。
云雷达一次观测个例的数据格式:500(垂直高度方向:分辨率30 m,500个库,总高度15 km)×500(时间特征,分辨率1 s,共计500 s)。
垂直廓线(VP)的生成方法:把同一个高度上不同时次的反射率因子、径向速度和退偏振因子值作统计平均(20 s的连续观测数据),则一次500 s的观测个例就得到25根垂直廓线对(VP-R,Vertical Profile of Reflectivity;VP-Ldr,Vertical Profile of Linear Depolarization Ratio;VP-V,Vertical Profile of Doppler Velocity )。通过这样的改进算法,保留数据的峰值特征和真实性,避免云雷达在实际观测过程中经常出现下面2种情况带来的计算误差:
(1)某一高度并不能一直都探测到雷达回波,因为大气中的云处在不断的演变和运动中,经过云雷达上方的云不是固定的,本来没有回波区域可能因为统计的原因产生平均值。
(2)雷达探测到的回波在某一高度不同时刻的强度不是固定不变的,同样大气中的云处在不断的形成演变中,长时间的统计平均将导致回波参量的峰值信息被弱化,对于特征值的提取产生误差,当采用相对较小的时间平均,会减小计算带来的误差,能提高垂直廓线的代表性、准确性和真实性。
20 ℃层亮带高度的识别方法
2.10 ℃层亮带概念模型
Fabry等[23]利用X-band雷达以及UHF边界层风廓线雷达研究大气融化层,认为“大气0 ℃层的高度就是雷达反射率因子的垂直廓线随海拔高度变化梯度最大值的位置”,这种方法导致识别的0 ℃层高度偏低,它将反射率因子的曲率变化最大值所在的高度设定为0 ℃层的高度。Klaassen[24]通过分析X-band多普勒雷达资料,认为0 ℃层的高度就是反射率因子的垂直廓线随海拔高度变化梯度最大值的位置。Zhang等[25]通过WSR-88D雷达研究反射率因子的垂直廓线,反演的融化层的垂直空间厚度<1.5 km。这里设定大气0 ℃层高度就是雷达探测参量的强度开始出现突变时的高度。
通过统计方法研究该部云雷达已有的探测资料,获取一些云雷达探测到的大气0 ℃层亮带的宏观特征,即云雷达垂直廓线亮带概念模型(图1a) 。图1b是WSR-88D雷达的反射率因子探测亮带的概念模型。可以发现云雷达的0 ℃层亮带概念模型与天气雷达在0 ℃层以下的变化趋势差异很大。
从概念模型提取关于云雷达探测参量应用于0 ℃层亮带识别的约束条件:
(1) 0 ℃层亮带厚度差:即图1a中显示的值(h2-h3);其中雷达反射率因子表征的值在0.60~0.70 km,退偏振因子表征的值在0.65~0.75 km。
(2) 0 ℃层亮带强度差:图1a位置h1高度的雷达参量强度值分别与h2、h3高度上的值的代数差。其中雷达反射率因子平均为5 dBZ,最大值接近10 dBZ,退偏振因子平均在9~11 dB。即当云雷达探测到大气0 ℃层亮带时,退偏振因子相对于反射率因子在亮带的强度特征变化更显著。
2.2大气0 ℃层高度识别方法的改进
(1)增加雷达探测参量多普勒径向速度作为0 ℃层高度的判别参量,水凝物从冰相变成液相,径向速度从典型的雪花下落速度1~2 m·s-1变成雨滴下落速度5~7 m·s-1,提高0 ℃层高度识别的准确性和可信度[26-27]。
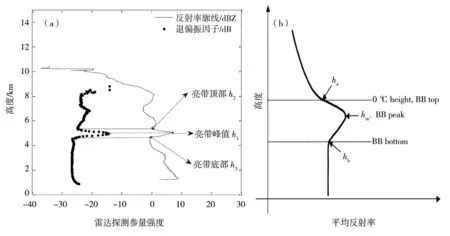
图1 云雷达(a)与WSR-88D雷达(b)垂直廓线亮带概念模型
(2)云雷达一次观测个例由时间跨度500 s(时间分辨率1 s,总共500个库)、垂直探测高度15 km(垂直空间分辨率30 m,总共500个库)构成,生成雷达反射率因子、径向速度、退偏振因子以及谱宽4种产品。原方法利用一次观测个例的平均垂直廓线(Vertical Profile,VP)得到0 ℃层亮带的一个上限高度和下限高度,即每一高度上500 s的观测时刻统计平均值生成一根垂直廓线(VP),利用该廓线去识别0 ℃层亮带的上限高度和下限高度。现在是批量处理一次降水过程所有的雷达探测产品,将同一高度连续20 s的参数进行统计平均求得一根廓线,利用该廓线识别大气0 ℃层高度,再将所有时刻的数据采用同样的处理方法,获得云雷达识别的大气0 ℃层高度的时空分布。
(3)原方法反演的参量包括大气0 ℃层的顶部和底部高度,现在改进成识别0 ℃层的高度,直接与探空数据资料进行对比。
基于VP-R、VP-Ldr和VP-V识别0 ℃层高度的方法主要包括下面4个步骤,具体描述如下。
(1) VP-R分析
从高空到地面,分析由25个数据库组成的单个区间(单个库长30 m,750 m的高度范围,云雷达探测到0 ℃层亮带的厚度差极大值),得到3个参量以及对应高度:极大值R1和高度h1、该区间向上的极小值R2和高度h2、该区间向上的极小值R3和高度h3。当雷达探测到0 ℃层亮带时,雷达反射率因子会产生显著的变化过程,同时满足下面3个约束条件的h2设置为由雷达反射率因子探测到的0 ℃层高度。如果多个高度同时满足设置的约束条件,则选取最大值所在区间的高度h2作为雷达反射率因子探测到的0 ℃层高度。3个约束条件如下:
(2)中药标本教学要与多媒体课件充分结合。结合岗位需求,教学中所购买的中药标本主要为饮片,饮片无法体现原药材整体形态、表面等性状特征,而且饮片因临床所需有不同的炮制品,各种类之间也有差异,一些贵重中药更是难以得到标本。因此,教学中还要应用多媒体课件展示原植物、原药材、炮制品、伪品等图片,以补充常用中药信息。
①R1>R2,R1>R3;
② (R1-R3)(R1-R2)≥18 dBZ (云雷达探测0 ℃层亮带个例中,反射率因子的强度最小变化值);
③h2-h1≥510 m(云雷达探测0 ℃层亮带个例中,反射率因子的厚度最小变化值)。
(2) VP-V分析
从高空到地面,分析由25个数据库组成的单个区间,得到2个参量以及对应高度:极大值V1和高度h1、该区间向上的极小值V2和高度h2,当同时满足下面2个约束条件的h2设置为由径向速度探测到的0 ℃层高度。如果多个高度同时满足设置的约束条件,则选取最大值点所在区间的高度h2作为径向速度探测到的0 ℃层高度。2个约束条件为:
① (V1-V2)2≥4 m·s-1(云雷达探测0 ℃层亮带个例中,径向速度的强度最小变化值);
②h1-h2≥450 m(云雷达探测0 ℃层亮带个例中,径向速度的厚度最小变化值)。
(3) VP-Ldr分析
从高空到地面,分析由25个数据库组成的单个区间,得到3个参量以及对应高度:极大值Ldr1和高度h1、该区间向上的极小值Ldr2和高度h2、该区间向上的极小值Ldr3和高度h3。当同时满足下面3个约束条件的h2设置为由退偏振因子探测到的0 ℃层高度。当有多个高度同时满足设置的约束条件,选取最大值点所在区间的高度h2作为亮带高度h2。
② (Ldr1-Ldr3)(Ldr1-Ldr2)≥20 dB(统计云雷达探测大气0 ℃层亮带个例中,退偏振因子强度差最小变化值);
③h2-h3≥510 m(云雷达探测0 ℃层亮带个例中,退偏振因子的厚度最小变化值)。
(4) 一致性分析
3个参量中,当至少有2个参量识别出大气0 ℃层的高度,且识别的高度差(不同参量识别的0 ℃层高度可能会有一定差异)在200 m以内,则云雷达探测的实际大气云中粒子存在从冰相转向液态的过程,而且可信度比较高,把2个参量识别出的高度作算数平均得到最终认定的雷达探测到的0 ℃层高度。如果少于2个参量识别到大气0 ℃层高度,认定这次的识别结果不可靠,粒子相态变化特征不明显。
3个例识别分析与算法效果评估
3.1个例分析
从2012年5月30日08:00(北京时,下同)云南腾冲的天气实况背景看出500 hPa受西南气流影响,700 hPa湖南—贵州南部有切变线存在(图略),地面受浙江南部到云南南部的静止锋控制,雷达探测位置位于降水区域。全天阵性降水,24 h降雨量为7 mm。从卫星红外云图(图略)可见,观测点附近有一切变线导致对流性天气发生,云顶亮温较低,上升运动明显,同时西南水汽的输送也很充足。水汽图(图略)显示观测点高空水汽条件充足,处于湿区,整层大气湿度条件较好。
图2是2012年5月30日14:01—16:24云雷达反射率因子、退偏振因子和径向速度的0 ℃层高度识别图(图中黑色线表示改进算法得到的0 ℃层高度)。从图2a可以看出,大气云层结构比较均匀,云顶高度9.0 km左右,云底高度400 m左右。随高度逐渐增加,雷达反射率因子先增大后减小,最大值出现在3.80 km附近,达14.0 dBZ。大气粒子从高层下落过程中,开始是很多小冰晶、雪花粒子,粒子数密度很大,但对雷达反射率因子贡献较小;不同粒子的空间位置取向及下落速度不同,相互之间出现碰并时由小的冰晶粒子、雪花粒子聚合成相对较大的固态或混合相态粒子,反射率因子应该有一定程度的增加,图中4.0~9.0 km区间,反射率因子是一个缓慢增长区域。在4.0 km以下位置,固相粒子融化,出现外包水膜,粒子相态开始发生转变,介电常数发生将近5倍的变化(冰相约为0.17,水相约为0.97),聚合作用明显,产生粒子数密度较小但尺度更大的液滴粒子,对雷达回波的散射贡献更大,产生的雷达回波反射率大。再往下,由于重力、大气湍流以及乱流等自身或是外界强迫作用大粒子破碎成小的液滴粒子,反射率因子也开始减小。从图2b中可以看出,退偏振因子随高度的增加先增加后减小,最大值出现在3.75 km左右(-12 dB),探测的云顶高度为9.0 km左右,粒子是冰相—混合相—液相的变化过程,当冰晶或者雪花粒子和大量的液态云滴混合在一起时,固相粒子的形状取向优势减弱,退偏振因子偏小,通过0 ℃层后,混合相态粒子表面开始融化,粒子在碰并聚合作用下,形状以及空间取向都会发生明显改变,另外粒子本身的相态属性发生变化而引起介电常数变化,使得Ldr迅速增大,形成亮带;当粒子融化过程结束,基本都是液相粒子,近似形成相对稳定的球型粒子以后,Ldr又出现一急剧减小的过程。从图2c中可以看出,在3.75 km以下位置,径向速度基本为-4 m·s-1(典型雨滴下落速度),3.75 km以上位置,其基本为-1 m·s-1(典型冰晶或者雪花的下落速度)。粒子由于碰并聚合,在自身重力作用下,下落速度开始逐渐增大,当形成雨滴时,下落速度达到极值。图2d是腾冲站5月30日19时的探空数据,可以看出0 ℃层的高度在3.84 km。
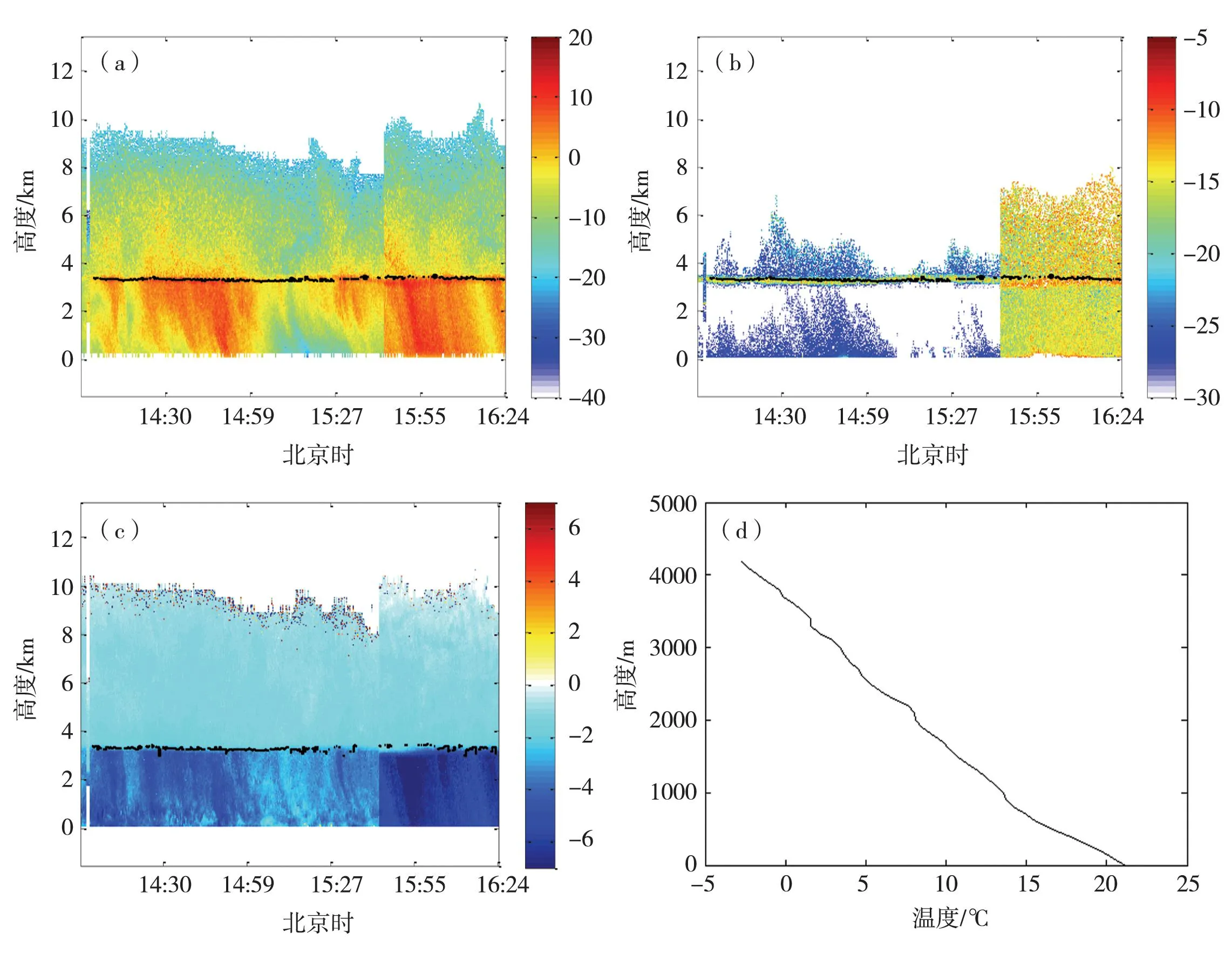
图2 2012年5月30日 14:01—16:24云雷达垂直向上扫描的反射率(a,单位:dBZ)、
综上所述,利用云雷达探测参量在大气0 ℃层附近表现出的显著特征,通过附加约束条件反演出来的0 ℃层高度基本与临近时次的探空数据显示的0 ℃层高度一致。因此改进的这种算法适合于反演大气0 ℃层亮带。
3.2改进算法效果评估
用原算法和改进算法对相同个例进行识别,并对结果进行分析,对2种算法进行评估。
图3给出2009年6月25日11:39—12:23时间段云雷达在广东珠海进行的一次完整的雷暴降雨探测过程。根据雷达观测日记记录,11:40天空开始出现雷暴,降雨过程一直持续到13:25。夏季亚热带区域,暖云系降水比较频繁,0 ℃层应该处于较高位置。从图3a、图3b、图3c中可以看出,12:00以前,反射率因子、退偏振因子和径向速度变化都不是很明显,这个阶段程序无法进行识别;12:00以后的观测数据,反射率因子和退偏振因子的强度在5.3 km处都有显著增加。图3d是未改进方法的识别效果(红色“+”为融化层顶、融化层底的高度标识)。可以发现,改进后的方法时间分辨率更高、视觉效果更好。探空数据0 ℃层位置约5.233 km(图略)。
表1是2008—2012年间云雷达所有观测资料用原方法和改进后方法的识别效果对比。可以发现,改进后方法进行的0 ℃层高度综合识别率由原方法的60%左右提高到75%左右,而且多参量同时识别到0 ℃层亮带,与对应的物理过程相匹配,可信度更高。
由于2013年5—8月在云南腾冲有配套的加密观测GTS1型数字式探空仪数据,因此表2给出2013年5—8月所有观测个例中有云雷达识别0 ℃层亮带的结果及探空数据与云雷达0 ℃层高度差。由于云雷达的工作时间一般在07:00之后、19:00之前,所以对应时间的探空数据只能用来做一个对比判断,以确定该区域是不是0 ℃层。总体看来,云雷达反演的结果与探空数据有一定的偏差,但基本都不超过150 m,并且0 ℃层高度也在动态演变。但是从表2看出,2012年5月22日的个例,云雷达与探空数据的0℃层高度差别很大,这是因为当日天气形势复杂多变,云雷达探测到的反射率因子在6 km的高度有一增大减小的“假亮带”,而对应的径向速度和退偏振因子在探空数据0 ℃层下方才有较为显著的变化,因此在6 km高度云雷达可能探测到雪粒子,导致反射率因子偏大而产生错误识别的情况。另外,2012年7月18日的个例,云雷达与探空数据的0 ℃层高度差别也很大,这是因为径向速度和退偏振因子的观测值都是缺测状态,仅用反射率因子进行对比分析,因此产生的误差较大。总之,云雷达能够在无降水云、弱降水云、小雨、中雨甚至大雨的天气形势下,对大气0 ℃层亮带进行监测识别。
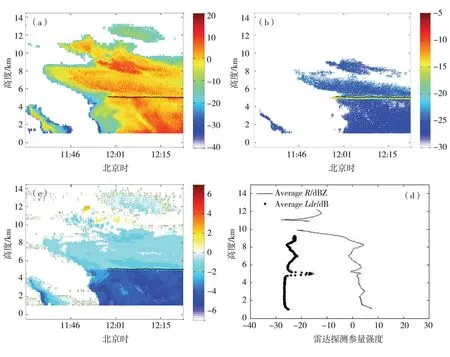
图3 2009年6月25日11:39—12:23云雷达垂直向上扫描的反射率(a,单位:dBZ)、退偏振因子(b,单位:dB)、

方法参量存在0℃层亮带个例(总390次)识别(亮带明显)未识别(探测资料分析可能存在亮带,但强度弱)亮带不明显漏识别错识别原方法1反射率因子224次(57%)94次(24%)52次(13%)20次(6%)退偏振因子245次(63%)90次(23%)51次(13%)4次(1%)改进方法2反射率因子275次(71%)94次(24%)6次(1%)15次(4%)退偏振因子295次(75%)90次(23%)6次(1%)4次(1%)径向速度330次(84%)22次(6%)18次(5%)20次(5%)方法参量不存在0℃层亮带个例(总1673次)识别未识别无亮带(含自检数据)错识别原方法1反射率因子5次(0%)1605次(96%)63次(4%)退偏振因子01673(100%)0改进方法2反射率因子01673(100%)0退偏振因子01673(100%)0径向速度01673(100%)0

表2 云雷达与探空数据对比结果(云南腾冲)
注:“-”表示数据缺测,“*”表示云雷达参量不能反演该数据,即该参量没有显著变化特征,天气形势为人工观测数据,降水量为24 h地面站降水量,误差分析中正值代表云雷达探测高度低于探空数据的0 ℃层高度,负值代表云雷达探测高度高于探空数据的0 ℃层高度
4小结
(1)相比于反射率因子,退偏振因子有明显的增加减小区域,而且某些时刻的反射率最大值不在0 ℃层附近。因此联合反射率因子、径向速度以及退偏振因子3个参量对0 ℃层高度进行反演,比用单个参量进行识别更可靠。 联合3个参量识别的0 ℃层高度与邻近时刻相同观测点探空数据探测的0 ℃层高度一致性很好。
(2)该部雷达的空间分辨率精确到30 m以内,时间分辨率精确到1 s,而且探测到的数据可以直接表征本站上空的实际情况。相比于常规天气雷达,在时空分辨率上都有一定的提高,而且可以作为常规天气雷达(C、S、X波段)灾害天气预警前期的资料补充工具;而探空数据,由于垂直风切变的影响,探空气球会出现漂离本站一定距离的情况,有时候不一定能表征本站上方的大气实际情况。
(3)2012年5—8月云南腾冲的观测,云雷达的工作地点在海拔1 600 m左右的山区,夏季阵性对流降水以及混合型降水频发,24 h降水量超过30 mm,这些从天气学角度划分属于大雨级别,因此大气水汽造成的信号衰减必须要考虑。
参考文献
[1] Smyth T J, Illingworth A J. Radar estimates of rainfall rates at the ground in bright band and non-bright band events[J]. Quart J Roy Meteor Soc, 1998,124(551):2417-2434.
[2] Liu H, Chandrasekar V. Classification of hydrometeors based on polarimetric radar measurements:Development of fuzzy logic and neuro-fuzzy systems and in situ verification[J]. Atmos Oceanic Technol, 2000,17(2):140-164.
[3] White A B, Gottas D J, Strem E T. An Automated Bright Band Height Detection Algorithm for Use with Doppler Radar Spectral Moments[J]. Journal of Atmospheric and Ocenic Technology, 2002,19(5):687-697.
[4] Marzano F S, Bauer P. Sensitivity analysis of airborne microwave retrieval of stratiform precipitation to the metling layer parameterization[J]. IEEE, 2001,39(1):75-91.
[5] Willis P T, Heymsfield A J. Structure of melting layer in mesoscale convective system stratiform precipitation[J]. Atmos Sci, 1989,46(13):2008-2025.
[6] Zhang J, Langston C, Howard K. Bright band identification based on vertical profiles of reflectivity from the WSR-88D[J]. Journal of Atmospheric and Oceanic Technology, 2008,25(10):1859-1872.
[7] Glickman T S. Glossary of meterology[M]. Amer Meteor Soc, 2000, 855.
[8] Marion P Mittermaie, Anthony J Illingworth. Comparison of model-derived and radar-observed freezing-level heights:Implications for vertical reflectivity Profile-correction schemes[J]. Quarterly Journal of the Royal Meteorological Society, 2006,129(587):83-95.
[9] Kenneth S, Campbell J R, Zhu J. Lidar and triple wavelength Doppler radar measurements of the melting layer:a revised model for dark- and brightband phenomena[J].Journal of Applied Meteorology, 2005,44(3):301-312.
[10] Pasqualucci F, Bartram B W, Kropfli R A, et al. A millimeter-Wavelength dual-polarization Doppler radar for cloud and precipitation studies[J]. Climate Appl Meteor, 1983,22(5):758-765.
[11] Hobbs P V, Funk N T, Weiss R R, et al. Evaluation of a 35-GHz radar for cloud physics research[J]. Atmos Oceanic Technol, 1985,2(1):35-48.
[12] Lhermitte R. A 94-GHz Doppler radar for cloud observations[J]. Atmos Oceanic Technol, 1987,4(1):36-48.
[13] Mead J B, Mcintoshre V, Emark D, et al. Remote sensing of clouds and fog with a 1.4 mm radar[J]. Journal of Atmos Oceanic Technol, 1986,6(6):1090-1097.
[14] Hamazu. A 35-GHz Scanning Doppler radar for fog observations[J]. Atmos Ocean Tech, 2003,20(7):972-986.
[15] Moran K P, Martner B E, Post M J, et al. An unattended cloud-profiling radar for use in climate research[J]. Amer Meteor Soc, 1998,79(3):443-455.
[16] 仲凌志. 毫米波测云雷达系统的定标和探测能力分析及其在反演云微物理参数中的初步研究[D]. 南京:南京信息工程大学,2009.25-46.
[17] Zhong Lingzhi, Liu Liping, Feng Sheng, et al. A 35-GHz polarimetric Doppler radar and its application for observing clouds associated with typhoon nuri[J]. Advances in Atmosphereic Sciences, 2011,28(4):945-956.
[18] 仲凌志,刘黎平,陈林,等. 星载毫米波测云雷达在研究冰雪天气形成的云物理机制方面的应用潜力[J]. 气象学报,2010,68(5):705-716.
[19] 孙晓光,刘宪勋,贺宏兵,等. 毫米波测云雷达融化层自动识别技术[J]. 气象,2011,37(6):720-743.
[20] 王德旺,刘黎平,仲凌志,等. 毫米波雷达资料融化层亮带特征的分析及识别[J]. 气象,2012,38(6):647-657.
[21] 宗蓉. 毫米波雷达对云宏微观特性的探测和研究[D]. 南京:南京信息工程大学,2013.71-80.
[22] Frost I R, Goddard J W F, Illingworth A J. Hydrometeor identification using cross polar radar measurements and aircraft verification[A]. Proceedings of the 25th conference on radar meteorology Paris[C]. American Meteorological Society, Bostion, USA, 1991.
[23] Fabry R, Austin G L, Tees D. Long-term radar observations of the melting layer of precipitation and their interpretation[J]. Atmos Sci, 1995,52:838-851.
[24] Klaasen W. Radar observations and simulation of the melting layer of precipitation[J].Journal of the Atmospheric Sciences,1988,45(24):3741-3753.
[25] Zhang J, Langston C, Howard K. Bright band identification based on vertical profiles of reflectivity from the WSR-88D[J]. Journal of Atmospheric and Oceanic Technology, 2008,25(10):1859-1872.
[26] Matrosov S Y. Attenuation-based estimates of rainfall rates aloft with vertically pointing Ka-band radars[J]. Atmos Oceanic Technol, 2005,22:43-54.
[27] Matrosov S Y, Peter T M, Matthew D Shupe. Rainfall profiling using atmospheric radiation measurement program vertically pointing 8-mm wavelength radars[J]. Atmospheric and Oceanic, 2010,23:1478-1491.
Identification of Atmosphere 0 ℃ Isotherm Through Cloud Radar Data
XIE Liping, WANG Dewang, HUANG Ningli, XIE Xiao, LIU Fei, OU Jianjun
(ShanghaiMarineMeteorologyCenter,Shanghai201306,China)
Abstract:In order to study the detection capability of 35-GHz cloud radar about 0 ℃ layer bright band of the atmosphere, firstly based on the 2 063 cases data detected by the cloud radar-HMBQ of Chinese Academy of Meteoological Sciences in different places from 2008 to 2012, the variation characteristics of reflectivity factor, radial velocity and linear depolarization ratio of the cloud radar under different weather conditions were analyzed, and the method that could identify the 0 ℃ isotherm height derived from the detection products of the cloud radar was improved. Results show that the cloud radar-HMBQ could detect the 0 ℃ isotherm under different weather conditions such as no rainfall cloud, weak rainfall cloud, small rainfall, moderate rain and heavy rain, and the change feature of the 0 ℃ layer bright band detected by the cloud radar was remarkble, which could make up for the shortage of the relevant information in the early warning of small scale weather system in summer including shorttime strong convection, convective monomer and so on. The improved method compared to the original one, the accuracy and time resolution were raised, it could identify the spatial and temporal change of the 0 ℃ layer bright band, and the results were in good agreement with radiosonde sounding 0 ℃ layer height.
Key words:cloud radar; sounding data; atmosphere 0 ℃ layer height
收稿日期:2015-11-20;改回日期:2015-12-28
作者简介:谢丽萍(1983-),女,硕士,工程师,研究方向为雷达气象及预报服务. 通讯作者:王德旺(1989-),男,硕士,工程师,研究方向为雷达气象与大气物理. E-mial:aizaizai1989@163.com
文章编号:1006-7639(2016)-03-09-0472
DOI:10.11755/j.issn.1006-7639(2016)-03-0472
中图分类号:P412.25
文献标识码:A
谢丽萍,王德旺,黄宁立,等.基于云雷达的大气0 ℃层亮带识别[J].干旱气象,2016,34(3):472-480, [XIE Liping, WANG Dewang, HUANG Ningli, et al. Identification of Atmosphere 0 ℃ Isotherm Through Cloud Radar Data[J]. Journal of Arid Meteorology, 2016, 34(3):472-480], DOI:10.11755/j.issn.1006-7639(2016)-03-0472