利用Terrasolid进行机载与车载LiDAR点云数据的融合
2016-07-15盛志鹏
盛志鹏
(浙江省第二测绘院,浙江 杭州 310012)
利用Terrasolid进行机载与车载LiDAR点云数据的融合
盛志鹏
(浙江省第二测绘院,浙江 杭州 310012)
摘要:介绍了一种利用Terrasolid软件进行机载与车载LiDAR点云数据融合的方法,通过分析两种扫描系统采集点云之间的共性与特性,制定了融合取舍原则,得到了覆盖范围全面的LiDAR点云融合成果,为LiDAR点云数据的应用和推广提供了良好的基础。
关键词:机载LiDAR;车载LiDAR;点云数据融合
LiDAR集GPS技术、惯性导航技术、激光测距技术等先进技术于一身,是一种主动式的遥感测量手段。近10年来,机载LiDAR技术在地形测绘、森林监测、地质灾害预警、应急保障、城市三维建模等方面发挥了巨大的作用,但是对于地面地物信息如建筑物立面的获取上存在盲区。
车载激光雷达系统采用车载平台,利用激光扫描和数字摄影技术获取道路两侧的高密集度点云、近景影像数据。车载LiDAR虽然无法获取建筑物顶面、院子内部等地物信息,但是弥补了机载LiDAR在地面地物信息获取方面的局限性。因此,机载与车载LiDAR点云数据的融合解决了两者自身获取点云存在盲区的问题,能在更多、更广的范围内获取高精度三维空间数据,同时作为一种全新的三维平台,既能生成DEM、DSM等成果为决策分析提供基础数据,又能经过后期处理制作精细城市三维建模成果。
一、试验数据分析
本次试验数据中,机载LiDAR点云数据单航带点密度约为12点/m2,多航带点密度≤80点/m2,车载LiDAR点云数据点密度≤10 000点/m2。
融合取舍的原则为:①点云属性统一;②密度高优先,覆盖其次;③特殊地物处理如屋顶和院子内部使用机载LiDAR点云,墙面使用车载LiDAR点云。
二、数据融合
1. 坐标系统转换
平面坐标系统、高程系统的统一是数据融合的前提条件。
2. LiDAR点云配准
机载LiDAR点云密度相对较低,但是误差分布均匀,经过控制点纠正后精度较高;车载LiDAR点云密度高,在GPS信号非常好的情况下精度较高,但是由于城市地区建筑物遮挡现象多,数据采集时经常会遭遇GPS信号失锁或周跳的状况,其精度远低于机载LiDAR点云精度。因此,LiDAR点云配准方法是将采集的车载LiDAR点云数据与机载LiDAR点云数据成果匹配,利用正射影像进行平面位置纠正,同时利用机载LiDAR点云数据进行高程纠正。车载LiDAR点云配准前后对比效果如图1所示。
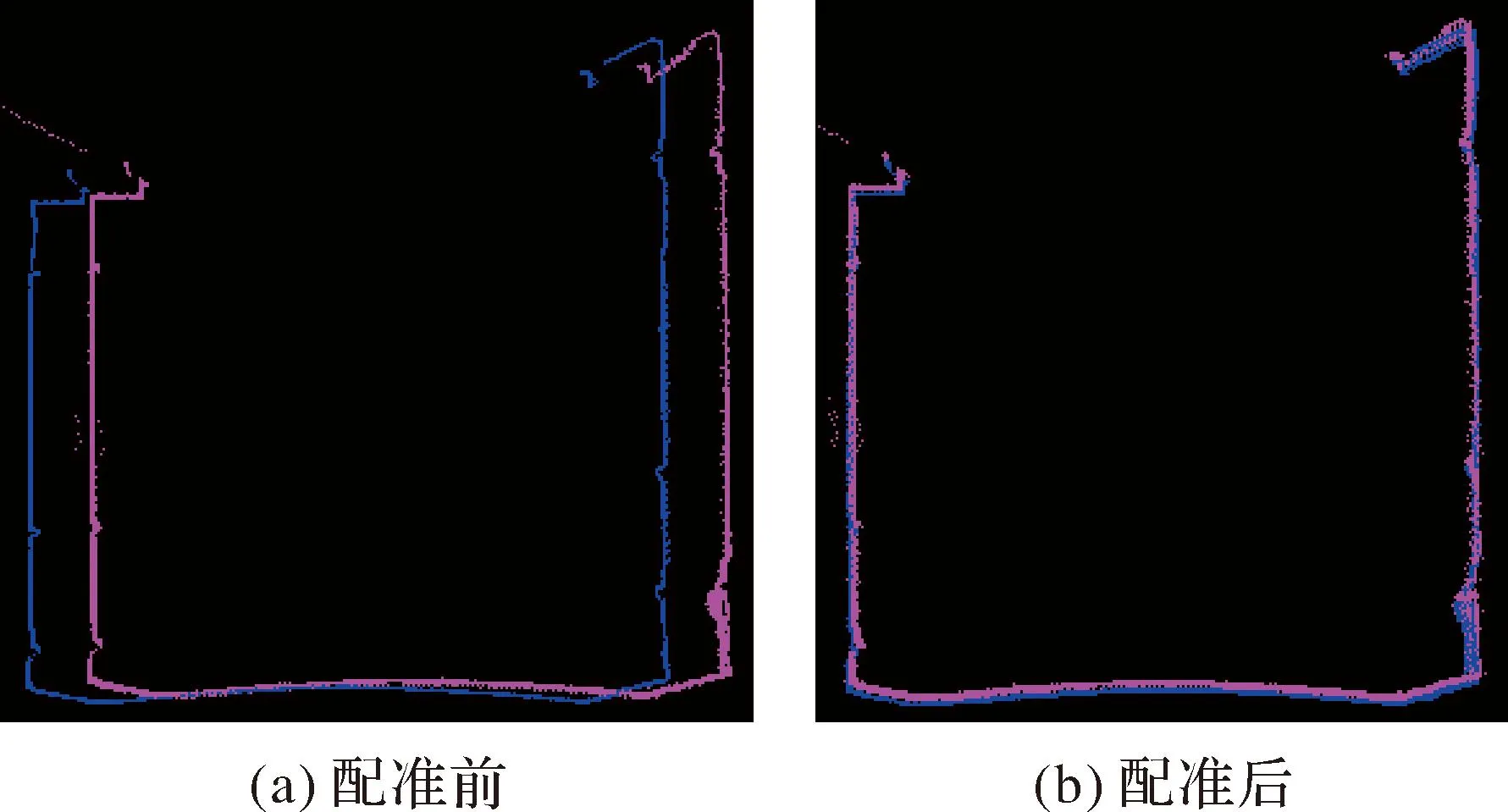
图1
3. 时间系统转换
时间是点云中的重要属性之一,时间系统的统一可以为后续点云现势性分析、点云分类等提供有效依据。试验数据中,机载LiDAR点云使用的是GPS标准时间,而车载LiDAR点云使用的是GPS周秒时间,需要根据采集日期将车载LiDAR点云的GPS周秒时间转换为GPS标准时间。
使用Converttimestamps工具,将GPSseconds-of-week转换为GPSstandardtime,试验数据中,车载LiDAR点云采集时间为2014年6月18日,故将surveydata参数设置为18/6/2014。
4. 反射强度尺度转换
不同激光扫描仪记录点云反射强度的尺度可能不同,为使反射强度尺度统一,同时又不损失精度,需要根据反射强度分布情况将尺度小的数据强度值扩大至尺度大的数据强度值范围。
(1) 反射强度分布
分别打开机载与车载LiDAR点云进行反射强度统计,在试验数据的机载LiDAR点云反射强度分布直方图中,强度中值为127,主要分布范围为31,如图2所示;同理得到车载LiDAR点云反射强度中值为20 200,主要分布范围为5600。
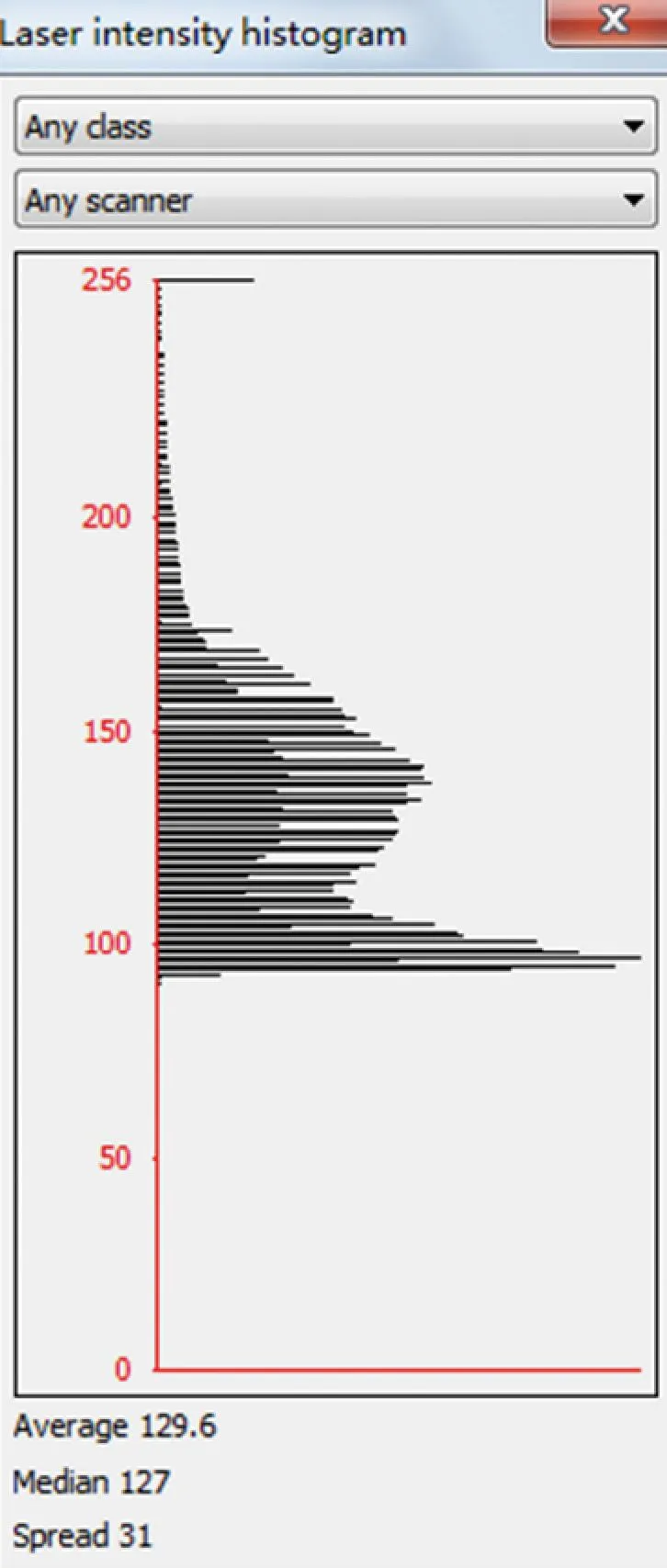
图2
(2) 反射强度尺度转换
使用Scaleintensity工具中的Stretchspread方法对机载LiDAR点云数据进行反射强度尺度转换,同时将统计结果填入对应参数位置。
5. 点云密度取舍
机载LiDAR点云密度相对小,应保留航带重叠部分的点云。车载LiDAR点云密度相对大,需要先删除航带重叠部分的点云,然后利用Thinpoints工具进行点云抽稀处理。试验数据中,抽稀后的车载LiDAR点云密度平均为3000点/m2。
6. 点云分类与赋色
为了增加点云的可读性,在同时采集影像的情况下可以分别单独进行点云分类与赋色处理。点云分类主要根据地形和地貌特征调试合适的参数,通过宏命令提取硬质地面、建筑、植被、水系等常用类别点云。机载LiDAR点云利用正射影像成果进行赋色,车载LiDAR点云通过选择最合适镜头拍摄的影像进行赋色,如图3所示。
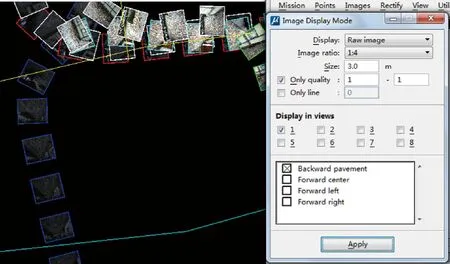
图3
7. 数据融合
(1) 导入工程
扫描头主要用于区分点云获取方式、激光扫描方式等,分别将两种LiDAR点云导入工程时需要设置扫描头编号。试验数据中,车载LiDAR点云数据中有2个扫描头数据,导入时编号设为1和2,机载LiDAR点云数据中有1个扫描头数据,导入时编号设为3。
(2) 航带重叠处理
使用Cutoverlap工具中的Cutbydensity方法,搜索半径设为0.4m,需要保留点云类别设为硬质地面和建筑,扫描头组合设为1~2。
三、结果评价
本次试验对机载与车载LiDAR点云数据进行了坐标系统、时间系统、反射强度尺度等属性的统一,并根据点云密度裁切保留了最有价值的点云,得到无缝拼接的机载与车载LiDAR点云融合成果,如图4所示。

图4
四、结束语
本文介绍了一种利用Terrasolid软件进行机载与车载LiDAR点云数据融合的方法,通过分析两种扫描系统采集点云之间的共性与特性,制定融合取舍原则,得到覆盖范围全面的LiDAR点云融合成果。该方法可用于多种类型点云的融合,为LiDAR点云数据的应用和推广提供良好的基础,结合同期采集的影像数据,可以为城市三维建模提供完整的数据支撑,具有重要的现实意义。
参考文献:
[1]黄金浪.基于TerraScan 的Lidar 数据处理[J].测绘通报,2007(10):13-16.
[2]陈云,丁思磊,王铁军.基于TerraSolid软件的LiDAR数据处理初探[J].测绘与空间地理信息,2009,32(4):40-42.
[3]张娟,张小叶.基于Terrasolid 系列软件的机载LiDAR 数据后处理[J].科技情报开发与经济,2009,19 (26): 90-92.
[4]刘沛,李英成,薛艳丽.基于Terrasolid与Inpho的LiDAR数据处理方法分析与研究[J].遥感应用,2010(1):17-21.
[5]谭敏,洪金益.基于Terrasolid软件的车载激光点云数据处理初探[J].测绘与空间地理信息,2011(5):195-198.
[6]刘妍,司海燕.基于TerraSolid的机载激光雷达点云数据处理应用[J].黑龙江工程学院学报(自然科学版),2012(3):10-13.
Airborne and Vehicle-borne LiDAR Point Cloud Data Fusion BasedonTerrasolid
SHENG Zhipeng
收稿日期:2016-02-29; 修回日期: 2016-05-17
作者简介:盛志鹏(1959—),男,教授级高级工程师,主要研究方向为激光雷达点云的应用拓展。E-mail:zjchszp@126.com
中图分类号:P237
文献标识码:B
文章编号:0494-0911(2016)06-0077-02
引文格式: 盛志鹏. 利用Terrasolid进行机载与车载LiDAR点云数据的融合[J].测绘通报,2016(6):77-78.DOI:10.13474/j.cnki.11-2246.2016.0194.
