永磁感应电机无功抑制研究与仿真
2016-07-13范秋凤李正斌马金元
范秋凤,李正斌,马金元
(安阳工学院电子信息与电气工程学院,河南安阳455000)
永磁感应电机无功抑制研究与仿真
范秋凤,李正斌,马金元
(安阳工学院电子信息与电气工程学院,河南安阳455000)
摘要:为抑制永磁感应电机(PMIM)的无功功率,提高其效率和功率因数,文章提出了PMIM的直接功率控制(DPC)方法。在分析PMIM的有功、无功功率之后,建立了PMIM的同步旋转坐标系数学模型。通过定子磁链位于不同扇区的功率特性分析,得到不同电压矢量对有功、无功功率的影响因素,对PMIM实施直接功率控制(DPC)的瞬时功率开关表,实现了直接功率控制,从而将无功功率抑制在零附近。仿真结果表明在同样有功功率输出的条件下,DPC方法能有效地减小无功功率,提高功率因数,达到节能目的。
关键词:永磁感应电机;直接功率控制;无功功率;开关表
0引言
永磁感应电机(permanent magnet induction mo⁃tor,PMIM)具有效率高、功率密度高、功率因数高以及调速范围广的特性,是一种新型的高效率低能耗电动机,尤其适用于泵类、风机类电机的长期运行。与常规感应电机相比,其转子有很大区别。永磁感应电机有两个转子:①外转子(鼠笼结构);②永磁内转子(可在轴上自由旋转)。正是由于永磁内转子的存在,PMIM永磁磁链可以随着转子同步速旋转,与永磁内转子的位置无关,因此该电机既有常规感应电机控制上的共同优点,又有永磁同步电机的独特优势。直接功率控制(direct power control,DPC)以控制功率为目标,可以有效地改善电机的功率因数,达到节能目的,并且该方法简单、容易实现。此控制方法广泛应用于在永磁同步电动机的驱动、逆变电源以及双馈异步发电系统等场合。本文将DPC原理应用于PMIM,并进行了仿真验证。
1 PMIM数学模型
本文为分析问题方便,作以下假设:无谐波、三相绕组对称、磁动势沿气隙正弦分布;不计磁路的非线性饱和及铁心损耗;绕组电阻不随环境变化。当定子通以三相对称电流时,因PMIM永磁转子与定子构成一个永磁同步电机的结构,故将产生一个同步旋转的磁场。正常转动时,永磁内转子也会以同步转速旋转,其永磁磁链也随转子同步速旋转,并切割定子。设定uds、ids、ids、ids、ids、iqs、idr、iqr分别为dq0坐标系下d轴、q轴的定、转子电压、电流,ω0为三相对称电流角频率,rs为定子内阻,rr为转子内阻,p=d/dt为微分算子。Lr为鼠笼转子自感,Lm为定子互感,Ls为定子自感,ψf0为永磁转子磁链,则PMIM的电压方程与磁链方程分别为(1)式和(2)式所示。

设s为鼠笼转子的转差率,联立(1)式、(2)式,则在dq0同步坐标中电动机电压方程为

2 PMIM功率分析
设δ为电机功率角、um为端电压,当电机处在稳定状态时,对输入电压进行d-q变换可得:

将电压方程(3)、磁链方程(2)带入方程(4)后,因定子dq0轴电流为恒值,则dq0轴磁链为恒值,pψ=0;同时忽略定子绕组电阻,忽略足够小项rs/ω0后,可得到


根据瞬时功率的定义,有
即PMIM的有用功率由三部分组成:永磁转子提供的功率、鼠笼转子提供的功率以及永磁转子对鼠笼转子带来的影响。
在同步速坐标系dq0中,PMIM的定子电压和磁链表达式为

由(7)式中的磁链方程可得到定子电流

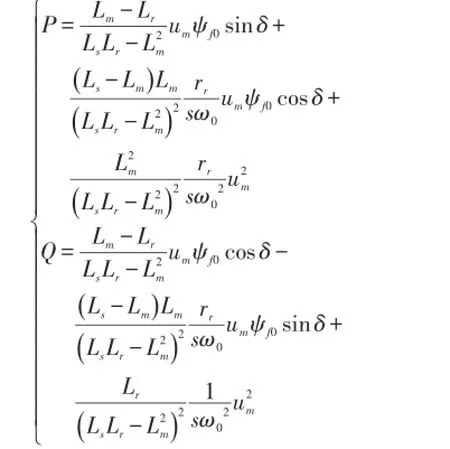
依据瞬时功率理论,定子输入的有功、无功功率分别为

假设cosϕ为功率因数、θ是负载角,并且考虑到:①定子磁链微分仅与磁链幅值的变化有关,而在稳态时,定子磁链幅值不变化,即pψs=0;②定子电阻对功率的影响很小,可忽略不计。然后将式(8)带入式(9),可以得到有功及无功功率的表达式分别为

功率因数最大为1,欲提高电机的功率因数,令功率因数cosϕ=1,无功功率Q=0。由式(10)中无功功率表达式可得

将式(11)代入有功功率的表达式,则

综上可知:①有功功率可以通过改变θ来调节。②决定无功功率大小的主要有定子磁链ψs和角度θ的大小。由于角度θ在有功功率调节中已经固定,因此调节无功功率只能依靠改变定子磁链。
3 PMIM直接功率控制原理
DPC控制算法主要包括:无功功率给定、定子电压计算、定子瞬时功率计算、功率滞环控制、扇区计算及开关表计算等。建立的PMIM直接功率控制系统原理框图如图1所示。
首先把给定转速800与转速反馈值ω的偏差送入PI调节器,PI调节器输出为定子绕组所需要的瞬时有功功率p∗。为抑制无功功率,令给定无功功率q*为零。定子电压可根据直流侧电压Udc和电压开关状态得到

然后使用3/2变换模块,根据功率不变原则,将三相静止坐标系中的变量变换到两相静止坐标系。


图1 PMIM直接功率控制系统原理框图
同时,电流传感器获得的电流值同样采用功率不变原则,变换到两相静止坐标系下,可得到电流分量为ial、ibe。把ual、ube、ial、ibe送入瞬时功率计算模块,可以得到定子绕组瞬时功率的估算值,即

将瞬时有功、无功功率估计值与给定值的差送入滞环比较器,pr、qr分别为有功、无功滞环比较器的环宽
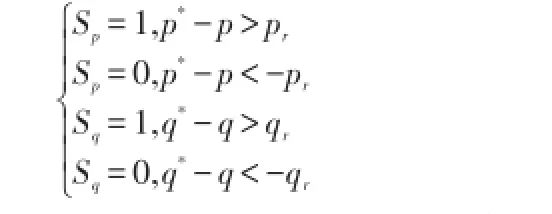
滞环比较器的输出分别为Sp和Sq,其值等于1表示在该控制周期中有功或无功功率的实际值小于给定值,应在下一个周期中增加有功或无功功率,其值等于0的情况正好与此相反。
把经过3/2变换得到的ual、ube减去定子绕组电阻压降后得到Eal、Ebe,然后计算定子绕组磁链在dq0坐标系下的相位位置,从而获得磁链的扇区号N。
电压矢量开关表的优劣直接决定控制效果的好坏,因此电压矢量开关表的制定应特别严谨。系统采用三相电压逆变器供电,各相开关采用互补导通切换模式,开关共有8种状态:V0(000)~V7 (111),除去两个无效电压矢量V0(000)和V7(111),共有六个有效电压矢量V1(001)~V6(110),将有效电压空间矢量分为12个扇区,其分布如图2所示。

图2 扇区与基本电压矢量图
下面将以扇区1为例,叙述电压矢量的优化和选择。从图2可以看出,电机为逆时针方向旋转,当定子磁链处于扇区1时,电压矢量V2、V3、V6将使得有功功率增大,但V2对无功功率影响较小,V3使无功功率减小,V6使无功功率增大。电压矢量V1、V4、V5将使得有功功率减小,V5对无功功率影响较小,V1使无功功率减小,V4使无功功率增大。故在扇区1时,需要同时减少有功功率和无功功率时,应选用电压矢量V1;当需要减少有功功率和增加无功功率时,应选用电压矢量V4;当需要增加有功功率和减少无功功率时,应选用电压矢量V3;需要同时增加有功功率和无功功率时,应选用电压矢量V6。同理,针对不同的扇区,并根据控制要求分析不同的电压矢量的作用,编制控制开关表,如表1所示。
4 仿真结果及分析
图1中,PMIM仿真模型中的参数均为dq0同步坐标系下的实际参数,且转子参数均为折算后数值,具体如下:定子电阻为2.81Ω,定子自感为39.47mH,转子电 阻 为 2.57Ω,转子自感为38.57mH,定转子互感为39.19mH,内转子磁链为0.52Wb,电机转动惯量为0.2kg·m2。
转速仿真波形如图3所示。从图3可以看出,开始时,电机带15N·m负载启动,电机转速线性上升,在达到800r/min基本稳定,与指定转速一致;在1s后电机负载转矩突加为35N·m,电机转速发生微小变化后,迅速稳定至790r/min。

图3 转速仿真波形
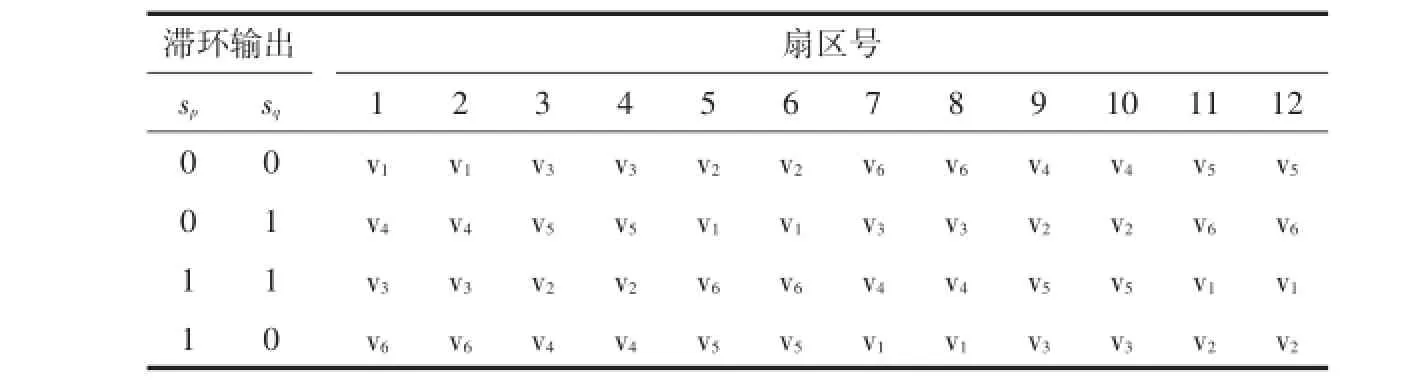
表1 直接功率控制开关表
有功、无功功率与转矩仿真波形分别如图4、图5、图6所示。

图4 有功功率仿真波形

图5 无功功率仿真波形

图6 转矩仿真波形
图4表明,直接功率控制在负载发生变化的情况下PMIM依然能正常稳定运行,图5显示无功功率接近于零,从而表明了直接功率控制的正确性和有效性。图6表明当负载转矩突增时,为保证电机转速不变,输出转矩也相应增大。
图7、图8为电机负载不同时三相电流的仿真波形。

图7 负载为15N·m时电流波形

图8 负载由15N·m增为35N·m时电流波形
从图7中看出,当电机转速稳定时,电机电流基本稳定;从图8中看出,负载在1s时增大,则电机的电流迅速增大。从图7、图8中可以看到电流所含谐波较大,这是由于直接功率控制从本质上来说,还是通过多边形的磁链轨迹来拟合圆形磁链轨迹,这种拟合方式必然带来一定的谐波。
5 结论
本文分析了PMIM直接功率控制(DPC)系统的工作机理,给出了相应的开关表,并对系统突变负载转矩条件下的性能进行了仿真,取得了很好的效果。仿真结果表明了DPC策略可以有效抑制永磁感应电机的无功功率,实现无功功率近似为零的良好性能,提高了其效率和功率因数,且结构简易,算法简单,易于实现。该方案对于采用PMIM的长期拖动的场合,具有较高的实际应用价值。
参考文献:
[1]SHIBATA Y,TSUCHID A N,IMAI K.Performance of in⁃duction motor with free-rotating magnets inside its rotor[J]. IEEE Transactions on Industrial Electronics,1999,46(3):646-652.
[2]储剑波,胡育文,黄文新,等.永磁同步电机直接功率控制基本原理[J].电工技术学报,2009,24(10):21-26.
[3]冯浩,刘玉军,钟德刚,等.双转子异步电动机的研究[J].中小型电机,2002,29(1):19-22.
[4]刁统山,王秀和.永磁感应电机直接功率控制[J].电机与控制学报,2013,17(4):12-18,26.
[5]杨贵杰,李勇,陆永平,等.永磁感应子式无刷直流电动机的模型及控制[J].中国电机工程学报,2003,23(5):122-127,135.
[6]杜春洋,杨贵杰,李铁才.永磁感应子式无刷直流电动机的转矩特性研究[J].电机与控制学报,2006,10(1):35-39.
[7]NOGUCHI T,TOMIKI H,KONDO S,et al.Direct power con⁃trol of PWM converter without power-source voltage sensors[J]. IEEE Transactions on Industry Applications,1998,34(3):473-479.
[8]郑灼.永磁同步电机瞬时功率控制[J].中国电机工程学报,2007,27(15):38-42.
(责任编辑:王彦永)
The Research and Simulation of Reactive Power Restrained for Permanent Magnet Induction Machine
FAN Qiufeng,LI Zhengbin,MA Jinyuan
(School of Electronic Information&Electrical Engineering,Anyang Institute of Technology,Anyang 455000,China)
Abstract:In order to reduce the reactive power,improve power factor and efficiency of permanent magnet induc⁃tion machine(PMIM),a direct power control(DPC)method is proposed in this paper.After analyzing the active power and reactive power,the mathematical model of PMIM was established based on the rotating coordinate sys⁃tem.According to the analyzing the power characteristic of different vectors which vectors exist,the vector switch table of the direct power control(DPC)was established.By this method the reactive power can be re⁃strained around zero.Simulation results show that under the same conditions of active power output,DPC method can effectively reduce the reactive power,improve power factor,to save energy.
Key words:permanent magnet motor;direct power control;reactive power;switching table
中图分类号:TM351
文献标志码:A
文章编号:1673-2928(2016)02-0031-05
收稿日期:2015-04-16
作者简介:范秋凤(1978-),女,安阳工学院电子信息与电气工程学院讲师,研究方向:自动控制。
