机器人结直肠癌根治术的学习曲线
2016-07-13刘东宁唐城江群广李太原
刘东宁 唐城 江群广 李太原
•论著•
机器人结直肠癌根治术的学习曲线
刘东宁 唐城 江群广 李太原
【摘要】目的 评估机器人结直肠癌根治术不同阶段的手术效果,探讨机器人结直肠癌根治术学习曲线问题。方法 分析2014年12月至2015年8月由同一组医师完成的75例腹腔镜结直肠癌根治术,按手术先后次序分3组(A、B、C),每组25例,比较各组机器人安装时间、手术时间、出血量、肛门排气时间、术后住院天数、术后并发症和3站淋巴结清扫数目及其总数的差异。结果 A组机器人安装时间(38±5)min,显著长于B组(22±4)min和C组(21±2)min(P均<0.05);A组手术时间(201±39)min,显著长于B组(160±42)min和C组(156±43)min(P均<0.05);A 组出血量(142±35)ml,显著多于B组(105±28)ml和C组(102±28)ml(P均<0.05)。3组肛门排气时间、术后住院天数、术后并发症和3站淋巴结清扫数目及其总数无显著性差异(P>0.05)。A组手术25例在4个月内完成,平均每月6.3台手术,B组和C组均在2个月内完成,平均每月12.5台手术。结论 有丰富腹腔镜结直肠癌手术经验的外科医师行机器人结直肠癌根治术的学习曲线大约为25例,手术频度为平均每月6.3例。
【关键词】结直肠肿瘤; 机器人; 学习曲线
自2001年Weber首次报道应用达芬奇机器人手术系统完成两例结肠良性疾病的手术以来,机器人手术已广泛应用于结直肠良恶性肿瘤的手术治疗当中[1-3]。我院自2014年12月开始开展达芬奇机器人结直肠癌根治术,手术开展顺利,近期疗效满意。但由于手术操作的复杂性,学成此类手术同样存在着学习曲线的规律。本文回顾性分析我科2014年12月至2015年8月进行的75例机器人结直肠癌根治术,探讨有关学习曲线问题,以期对未来培养机器人结直肠手术专业医师提供参考。
资料与方法
一、一般资料
我科机器人专业组于2014年12月开始开展达芬奇机器人结直肠癌根治术,至2015年8月共完成75例。其中男39例、女36例;年龄32~83(56.7±2.0)岁;行右半结肠切除术11例,左半结肠切除术4例,直肠前切除术46例,直肠Miles术14例;中转开腹3例(3.84%);术后并发症8例(10.67%)。
二、手术组相关背景
全部手术由同一手术组完成。主刀医师具有10年腹腔镜结直肠癌手术经验,第一助手和手术室护士相对固定。主刀医师和手术室护士均经过香港威尔士亲王医院微创培训中心的达芬奇机器人操作培训并取得证书。
三、手术方法
采用四孔法[3]。应用达芬奇机器人外科手术系统(美国Intuitive Surgical公司)辅助完成手术,Endo Wrist器械通常选用单孔抓钳、超声刀、持针器和电钩。术前准备同腹腔镜结直肠癌手术。所有患者取传统腔镜手术体位。机器人手术穿刺孔位置:观察孔12 mm Trocar根据手术部位放置在距肿块约15 cm的脐对侧,在观察孔两侧分别相距8~12 cm处放置用于A、B机械臂的8 mm Trocar。此外,放置12 mm的助手孔1个。机器人手术均先经脐孔用气腹针造二氧化碳气腹,压力为13 mmHg(1 mmHg=0.133 kpa),然后根据预设定的穿刺孔位置置入Trocar。通常选用3个机械臂,即观察臂和A、B机械臂,再设置助手Trocar 1个。手术步骤类同腔镜手术,置入立体镜头后常规探查,明确腹腔内有无腹腔积液及肝脏、腹膜、盆腔淋巴结转移。手术切除范围等同于开腹手术及腹腔镜手术,结肠切缘距肿瘤至少10 cm;手术步骤遵循由内向外、由远及近、先处理血管和非接触肿瘤等原则。主要用超声刀或电剪刀分离止血,尽量采用锐性分离。先行肠系膜血管根部的淋巴结清扫和结扎,再游离并切除病变肠段。小切口取出标本,体外完成肠管连续性再造(右半结肠切除、左半结肠切除和乙状结肠切除再吻合)或体外放置吻合器抵钉座体内完成吻合(直肠前切除术)。
四、分组及评价指标
将75例患者按手术先后依次分为A、B、C 3组,每组25例,分别比较各组的机器人安装时间、手术时间、术中出血量、术后肛门排气时间、术后住院天数、术后并发症和3站淋巴结清扫数目及其总数,同时分析三个阶段的手术频度。从观察孔切皮建立气腹开始,至各trocar建立完毕,机器人镜头、1臂、2臂器械进入腹腔准备好这段时间为机器安装时间;机器人准备好开始手术至切口缝合完毕为手术时间[4]。
五、统计学分析
使用SPSS17.0统计软件。3组计量资料比较采用One Way ANOVA检验,两两比较用SNK方法。计数资料采用列联表χ2检验。P<0.05为差异有显著性统计学意义。
结 果
一、各组的临床资料比较
各组临床资料中平均年龄、性别、TNM分期(术后临床分期)和手术方式均无显著差异(P均>0.05)。见表1。
二、各组手术效果比较
A组机器人安装时间明显长于B组或C组(P均<0.05),而B、C两组之间差异无显著性统计学意义(P>0.05);A组手术时间明显长于B组或C组(P均<0.05),而B、C两组之间差异无显著性统计学意义(P>0.05);A组术中出血量明显多于B组或C组(P均<0.05),而B、C两组之间差异无显著性统计学意义(P>0.05);其余各项指标在三组的差异均无显著意义。见表2。
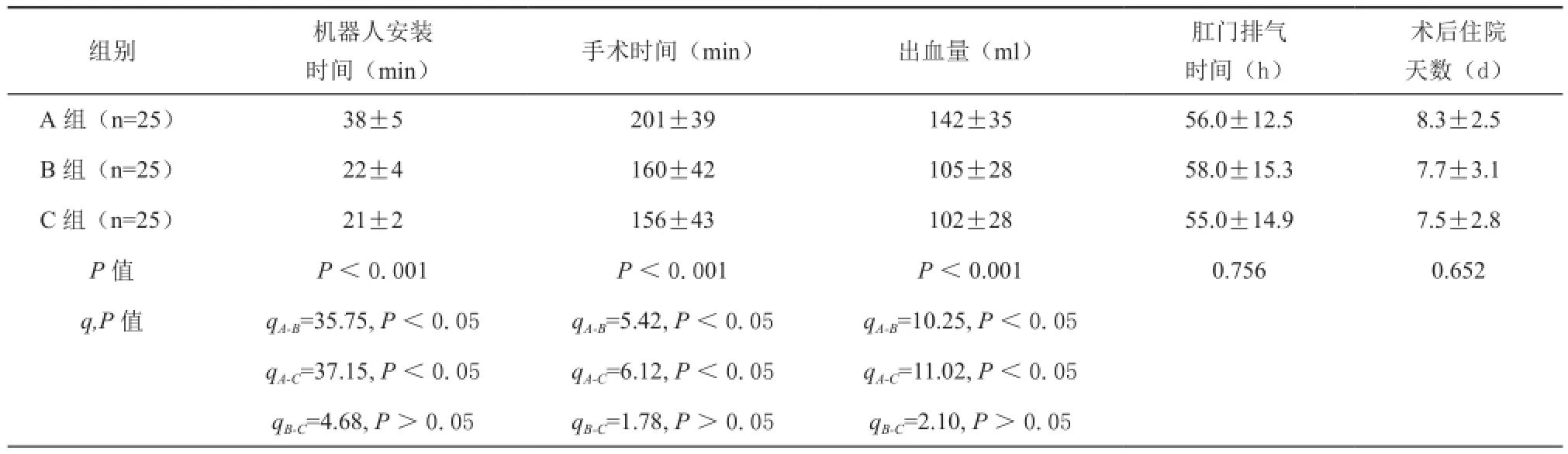
表2 各组手术效果比较表
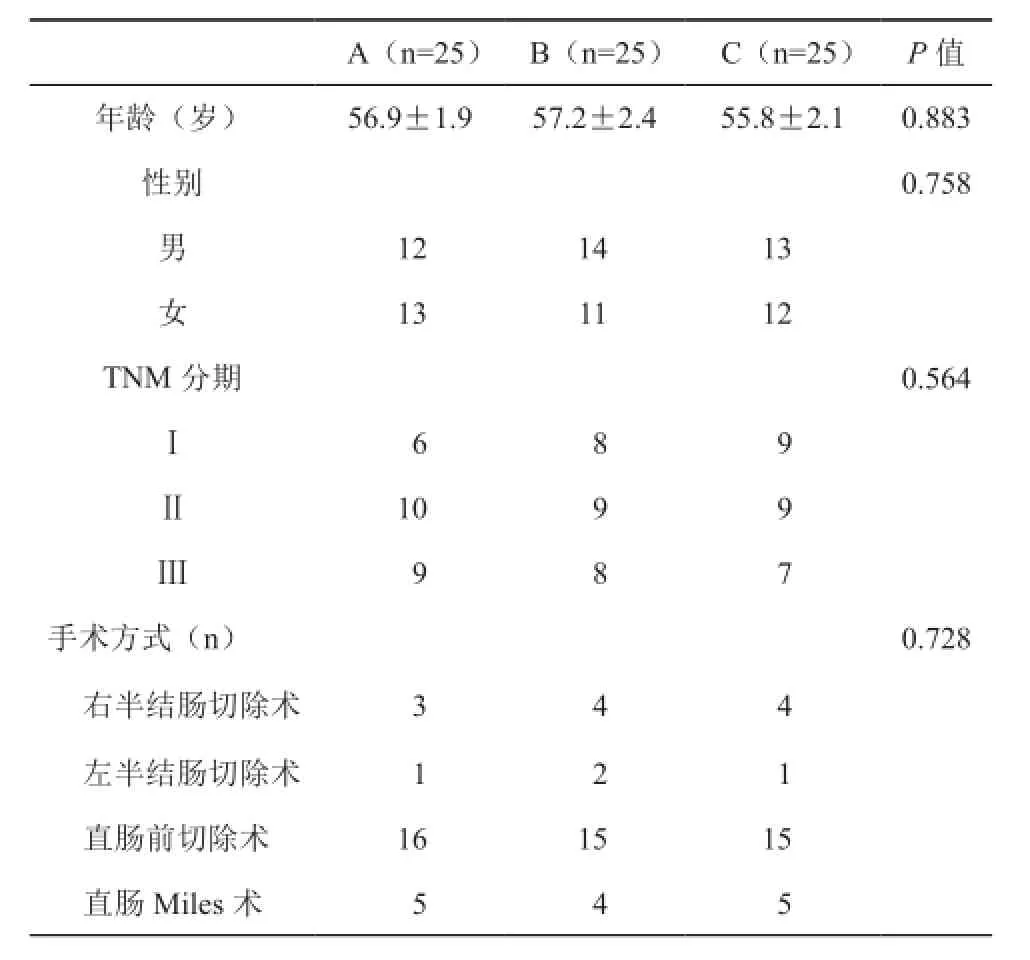
表1 各组病人临床资料表
三、三站淋巴结清扫数目及其总数的比较
A、B、C3组中3站淋巴结清扫数目和总数差异均无显著意义。见表3。

表3 各站各组淋巴结清扫数目比较表
四、术后并发症
全组切口感染4例(辅助切口),吻合口大出血1例,吻合口瘘3例(均为超低位直肠前除术者),均保守治疗痊愈。各组术后并发症发生率:A组37.5%(3/8),B组37.5%(3/8),C组 25%(1/4),各组间比较,差异无显著性统计学意义,χ2=0.256,P=0.121。
五、各组手术频度
A组在4个月内完成,平均每月6.3台手术,B组和C组均在2个月内完成,平均每月12.5台手术。
讨 论
作为一个外科医生,无论是行开放手术或腔镜手术都要经历对某一类手术从不熟练到熟练的过程。正如Moore等[5]对腹腔镜胆囊切除术学习曲线的总结,认为在达到熟练状态前的最初手术阶段,即为腹腔镜医师的学习阶段,学习曲线通常以该阶段所需的手术例数来衡量。
由于达芬奇机器人手术系统具有以下优势:① 具有稳定的摄像机平台和自由活动的仪器设备,不受人体肌肉震颤的干扰;② 能够提供 5~15倍高清晰3D放大图像,使术者术中能够清晰地完成重要神经的分离和大血管周围淋巴结的清扫;③ 机械臂模拟人的手腕具备7个方向的自由活动度,在狭窄、复杂的手术区域比人手更为灵活。因此,可以推测达芬奇机器人的学习曲线应较腹腔镜短。新近的系统综述分析[6-7]比较了机器人与传统腹腔镜实施结直肠癌根治术的学习曲线,完成腹腔镜手术学习阶段需要约50~250例患者,机器人术式则仅需要约20~70例患者,证实了机器人术式具有更短的学习曲线。
尽管不同的研究在设定评价学习曲线的参数方面存在差异,但外科医生通常会从手术时间、术中出血、中转开腹率、手术疲劳度等方面评价学习曲线[6-7]。本研究分析了同一手术组连续完成的75例机器人结直肠癌切除手术效果,结果表明,开展25例后,机器人安装时间和手术时间明显缩短、术中出血量也明显下降,差异有显著性意义(P<0.05);随着手术例数的增加,住院天数逐渐缩短,术后并发症有所下降,但均无显著性差异。后期两组平均机器人安装时间、手术时间、术中出血量、并发症等指标均没有显著差别,提示技术达到相对稳定成熟状态。因此,可以推断机器人结直肠癌手术的学习曲线大约是25例。由于动作技能的形成需要重复的训练,训练的强度和重复的频率是影响动力定型的重要因素,因此我们认为单纯用手术例数表达学习曲线还欠准确,应当说明这些手术是在多长时间内完成的,即手术的频度。本组前25例在4个月内完成,平均每月6.3例。同时,3站淋巴结清扫数目及其总数均没有显著差别,符合《大肠癌规约》的要求[8],表明我们的机器人手术从一开始便遵循肿瘤外科原则。
学习曲线必竟是以较长的机器人安装时间、手术时间、较多的出血量和手术 并发症发生率为代价的,因此,钝化学习曲线显得非常重要。我们认为,钝化机器人结直肠癌根治术的学习曲线可以从以下几个方面着手:① 手术团队应具有丰富的开放及腹腔镜结直肠癌手术经验,同时接受正规的机器人结直肠癌手术操作培训;② 固定手术团队,固定的手术成员搭配,各自都可较快地积累自己的经验;同时又由于长期配合,利于形成共同的认识,提高手术效率;③ 简化并规范手术流程,确保提供完善的器械设备;④ 总结不同手术患者体位选择、机械臂安装技巧和trocar布局的经验,缩短机器人的安装时间;⑤ 良好的心理素质。手术开展初期,对手术的难度和风险有足够的认识,术中避免疲劳和焦躁;⑥ 通过不同途径方式,多与同行交流学习。
总之,随着达芬奇机器人结直肠癌手术的大量开展和经验的不断积累,手术人员进行该类手术的学习曲线必将逐渐缩短。
参 考 文 献
[ 1 ] Weber PA, Merola S, Wasielewski A, et al. Telerobotic-assisted laparoscopic right and sigmoid colectomies for benign disease. Dis Colon Rectum, 2002, 45(12): 1689-1694.
[ 2 ] Baik SH, Lee WJ, Rha KH, et al. Robotic total mesorectal excision for rectal cancer using four robotic arms. Surg Endosc, 2008, 22(7):792-797.
[ 3 ] 刘凤涛, 江志伟, 赵坤,等.达芬奇机器人系统在直肠癌根治术中的应用 (附70例报告). 腹腔镜外科杂志, 2012, 17 (9): 677-679.
[ 4 ] 兰远志, 曾冬竹, 张超, 等.达芬奇机器人直肠癌根治术的学习曲线. 中国微创外科杂志, 2014, 14(6): 490-493.
[ 5 ] Moore MJ, Bennett CL. The learning curve for laparoscopic cholecystectomy. The Southern Surgeons Club. Am J Surg, 1995,170(1): 55-59.
[ 6 ] Barrie J, Jayne DG, Wright J, et al. Attaining surgical competency and its implications in surgical clinical trial design: a systematic review of the learning curve in laparoscopic and robot-assisted laparoscopic colorectal cancer surgery. Ann Surg Oncol, 2014, 21(3):829-840.
[ 7 ] Mak TW, Lee JF, Futaba K, et al. Robotic surgery for rectal cancer:A systematic review of current practice. World J Gastrointest Oncol,2014, 6(6): 184-193.
[ 8 ] 胡跃, 张苏展. 结直肠癌诊治指南热点解读. 中国实用外科杂志,2011, 31(6): 473-475.
(本文编辑:杨明)
刘东宁, 唐城, 江群广, 等. 机器人结直肠癌根治术的学习曲线[J/CD]. 中华结直肠疾病电子杂志, 2016, 5(1): 52-55.
Learning curve of robot-assisted laparoscopic radical resection for colorectal carcinoma
Liu Dongning,Tang Cheng, Jiang Qunguang, Li Taiyuan. Department of General Surgery, The First Affiliated Hospital of Nanchang University, Nanchang 330006, China.
Corresponding author: Li Taiyuan, Email: jylitaiyuan@sina.com
【Abstract】Objective To evaluate the outcomes of robot-assisted laparoscopic radical colorectal resection and to define the learning curve of robot-assisted laparoscopic radical colorectal resections. Methods Clinical data of 75 cases underwent robot-assisted laparoscopic radical resection for colorectal cancer were reviewed form December 2014 to August 2015.The patients were divided into 3 groups (groups A, B and C) by operative sequence.The robotic set-up time, operating time, bleeding volume, postoperative aerofluxus time, hospital stay, postoperative complications, number of removed lymphatic nodes were compared among the 3 groups. Results The robotic set-up time in group A was significantly longer than that in group B and C [ (38 ± 5) min vs. (22 ± 4) min, P<0.05; (38±5) min vs. (21±2) min, P<0. 05 ], and there was no significant difference between group B and group C (P>0.05). The operating time in group A was (201±39) min, significantly longer than that in group B (160±42) min and group C (156±43) min (P<0.05), but the operating time did not vary significantly between group B and C (P>0.05). The bleeding volume was significantly greater in group A than in group B and C (142±35, 105±28, and 102±28ml,respectively, P<0.05), but showed no significant difference between the latter two groups (P>0.05). No significant difference was found in post operative aerofluxus time, hospital stay, postoperative complications,number of removed lymphatic nodes among the 3 groups (P>0. 05). The 25 patients in group A received the operation within a time period of 4 months (6.3 cases per month), and groups B and C were done in 2 months (12.5 cases per month). Conclusions The surgeons with abundant experiences of laparoscopic colorectal cancer surgery can learn the surgical skills after performing 25 robot-assisted laparoscopic radical resections for colorectal neoplasms, the operation frequency was an average of 6.3 cases per month.
【Key words】Colorectal neoplasms; Robotics; Learning curve
DOI:10.3877/cma.j.issn.2095-3224.2016.01.10
基金项目:国家青年科学基金(81402401);江西省自然科学基金(20142BAB215042)
作者单位:330006 江西,南昌大学第一附属医院普外科
通信作者:李太原,Email:jylitaiyuan@sina.com
收稿日期:(2016-1-26)