基于移动代理的目标跟踪WSN体系结构设计*
2016-07-12陈佳俊邢昌风王晓蓓汪丹丹
陈佳俊,邢昌风,王晓蓓,汪丹丹
(1.海军工程大学电子工程学院,武汉 430033;2.海军工程大学电气工程学院,武汉 430033;3.海军飞行学院,辽宁 葫芦岛 125001)
基于移动代理的目标跟踪WSN体系结构设计*
陈佳俊1,邢昌风1,王晓蓓2,汪丹丹3
(1.海军工程大学电子工程学院,武汉430033;2.海军工程大学电气工程学院,武汉430033;3.海军飞行学院,辽宁葫芦岛125001)
摘要:在目标跟踪WSN网络中,引入移动代理技术,选择性地访问传感器节点和融合数据,能极大地提高WSN网络的性能。提出了一种基于移动代理的WSN目标跟踪网络体系结构,对网络中的移动代理进行了分类,定义了各类移动代理的功能和结构,建立了基于移动代理的目标跟踪工作流程。最后通过仿真实验,验证了随着网络节点数量的增加,提出的目标跟踪WSN结构的与传统的C/S模式目标跟踪WSN结构相比,单位负载量等性能指标上具有较大的优势。
关键词:目标跟踪,无线传感器网络,移动代理,系统体系结构
0 引言
由于良好的灵活性和性价比,无线传感器网络(WSN)广泛应用于各种动态水质监测、重要港口预警、海底地形勘探、设备状态监控和军用监视任务[1]。无线传感器网络在应用于目标跟踪系统时,具有跟踪隐蔽、精确度高、成本低廉等多种优势[2],但是由于无线传感器本身的限制,传感器节点的能量和存储容量都非常有限,单个传感器检测能力、计算能力较弱,通常需要依靠多个传感器节点协作才能完成跟踪任务。在传统的基于C/S模式目标跟踪WSN(C/S-TWSN)中,数据从节点传到处理中心处理,虽然这样可以得到最优的跟踪结果,但网络通信和计算复杂度随着网络规模的增大而迅速增加,极大地降低了目标跟踪的效率,因此,有必要设计一种全新的体系结构的目标跟踪WSN体系结构。
基于移动代理(MA)的无线传感器网络改变了信息在网络中的传播方式。2001年,Hairong Qi教授提出将MA技术应用到分布式传感器网络的数据采集过程[3]中,并建立了一种MADSN的体系结构[4],该结构利用MA技术消除WSN中传递的冗余数据,但是该结构仅适用于单跳分簇结构的WSN,并将该结构应用于目标跟踪WSN[5]。文献[6]提出了一种适用性更为广泛的体系结构,称为MAWSN体系结构,该结构适用于普通未分层的WSN,该结构(节点、任务、协作)在3个层次上过滤WSN冗余数据,并对结构内的MA的迁移调度问题作了进一步研究[7-8],通过仿真比较,MAWSN尽管在数据延迟上落后于MADSN,但在减少能量消耗上远远超过MADSN结构。Yuechao Wang提出了一种适用于医用监护系统的MHWSN体系结构[9],设计了基于查询驱动的服务和基于事件驱动的服务两种服务模式。
但上述研究大部分是针对特定条件或特定应用的WSN设计的,提出的结构并不能很好地满足目标跟踪WSN的需求。同时,上述研究也仅仅从WSN中冗余数据处理和服务响应模式等方面进行了研究,并未给出基于MA的目标跟踪WSN完整工作过程和体系结构,也没有给出系统中MA本身的功能和结构定义,对于MA技术在目标跟踪WSN中的应用要求还有一定差距。因此,本文针对目标跟踪应用的实际需求,基于常用的声学传感器WSN,建立了一种基于MA的声学传感器目标跟踪WSN体系结构(MA-TWSN),并定义了系统中MA的结构和工作方式。
1 目标跟踪WSN系统体系结构
1.1目标跟踪WSN基本工作原理分析
假设WSN跟踪目标为一个点目标,目标在运动过程中发出一定的声音,其中声音信号的传播为各向同性。传感器可以探测到来自目标的声音信号强度。在跟踪开始之前,认为每个传感器节点的位置信息已知(节点携带的GPS或利用节点自定位算法),只有一个目标在探测区域内运动,目标的运动方向和速度不会经常变化,所有节点的初始能量是相同的。通常情况下,可以用有向图G(N,L)表示目标跟踪WSN,假设WSN环境中有n+1个传感器节点,用ni表示(sink节点用n0表示),ni∈N节点上面的传感器用si表示,节点ni到节点nj的距离为lij(lij>0)。
根据声学理论,声音信号在传播过程中,其强度的大小与传播的距离成反比[10],WSN传感器节点探测目标的信号强度,并在节点本地处理以得到传感器的探测值。假设在时刻t,目标的位置为xt,传感器si的位置为xi(各个传感器的位置在目标跟踪过程中假设是不变的),则时刻t传感器si探测到的来自目标的信号强度为[11]:

其中Ψ为单位距离上测得的来自目标的信号强度;‖xt-xk‖为目标当前位置与传感器sk位置之间的空间几何距离,α可以认为是一直不变的,并且对于所有传感器节点是相等的。vt,k为时刻t传感器sk接收到的噪声强度,当用于求平均能量时间窗长度T足够长时,可以认为其服从于均值uv,方差为σv2的正态分布,即vt,k~N(uv,σv2),设定一阈值γ,只有yt,k>γ,才认为传感器sk发现目标,节点可以根据yt,k估计目标当前位置与传感器sk之间的距离rk,在获取3个以上的节点与目标的距离信息时,就可以使用三边测量法(Trilateration)对目标位置进行计算。
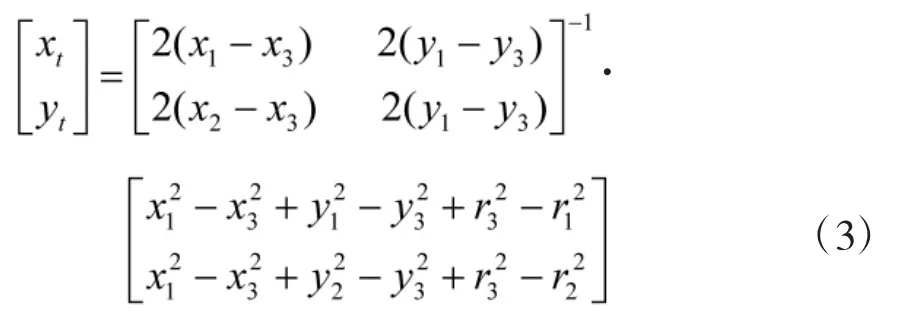
三边测量法是一种基于几何计算的定位方法,已知节点s1、s2、s33个节点坐标分别为(x1,y1)、(x2,y2)、(x3,y3),以及目标到3个节点的距离r1、r2、r3,设目标的位置坐标为(xt,yt),则由式(2)可以求解:
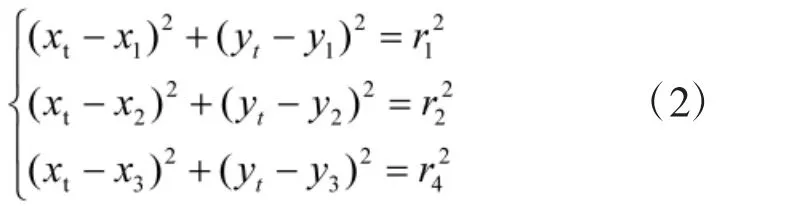
由式(2)可以得到目标的坐标为
在得到目标的点迹数据后,采用扩展卡尔曼滤波算法(EKF)、无迹卡尔曼滤波算法(UKF)和粒子滤波算法(PF)等算法,估计目标的运动状态和航迹,并将结果信息传递给远程用户,这里不详细介绍。
1.2目标跟踪WSN中MA分类与结构定义
在目标跟踪WSN中,根据1.1节中描述的MA工作过程,系统中的MA都生存在节点MA平台上,基本可以分为以下几个类型:全局管理MA(GMMA)、节点信息MA(NMA)和数据处理MA(DMA)。
1.2.1全局管理MA
全局管理MA(GMMA)是一个MA系统必须的组件,它是一个特殊的MA(通常在一个MA系统中是唯一的),主要负责管理MA系统的活动,包括MA的创建和删除,管理MA的任务分配和迁移规划,同时存储数据处理MA传回的目标位置信息。在目标跟踪WSN中,每个MA必须在全局管理MA中注册,从而得到一个标识(AID,它是全系统唯一的,且不可更改的)。在GMMA的数据段保存一个MA信息表和一个目标位置信息表,GMMA可以根据目标跟踪任务,查询MA信息表中的信息,对系统内所
有MA分配任务和进行管理,并根据远程应用的需求,将目标位置信息表的数据传回。
1.2.2节点信息MA
节点信息MA(NMA)的主要功能是收集整个目标跟踪WSN中各个节点的基本信息(节点ID、工作状态、节点的位置和节点剩余能量等),这些信息为GMMA管理整个WSN内的MA和分配任务提供了基础信息。与GMMA类似,NMA在其数据段保存一个节点信息表,用来存储节点基本信息。
1.2.3数据处理MA
数据处理MA(DMA)是目标跟踪WSN最重要的一类MA,它们主要负责收集节点传感器探测到的目标信号,并进行处理,得到目标运动状态信息。DMA通常在sink节点产生,移动到目标探测节点区域,采集节点探测到的目标信息,采用三边测量法获得目标的位置信息,进而根据滤波算法计算目标的运动状态,并传回sink节点的GMMA。因此DMA需要在其数据段保存一个行程表,一个目标运动状态信息表,和一个节点采集数据表。
2 系统工作流程设计
上节定义了基于MA-TWSN中的基本MA类型和结构,本节将对系统的整个工作过程及其关键技术进行分析。这里将系统的工作流程分为WSN构建阶段和目标跟踪阶段,如图1所示。其中,WSN构建阶段主要完成系统的基础信息的采集,主要是利用NMA构建WSN节点基本信息表;目标跟踪阶段是当有目标进入WSN探测范围时,系统利用DMA处理探测节点信息,并将DMA处理结果返回GMMA,进而发送给远端用户。
2.1WSN构建阶段
在WSN网络部署完毕后,远程用户向sink节点发送启动MA平台的消息,sink节点GMMA创建后,GMMA调用create()方法,创建NMA(NMA的数量根据WSN网络的规模和节点数量决定,通过相应的规划算法计算),NMA需要前往WSN中的各个传感器节点收集传感器的基本信息,NMA通过调用route()方法计算下一个迁移的节点,抵达目的节点后调用record()方法采集节点的基本信息,完成采集后将当前节点加入行程表,再次调用route()方法计算下一个迁移节点,重复上述过程,直至所有节点都已经被访问完毕,再次迁移回到sink节点,将MA信息表发送给GMMA,GMMA向远程用户发送系统构建完成的信息,基于MA的目标跟踪WSN构建完毕,可以进入正式的工作阶段。图2给出了本阶段系统内MA工作的时序图。

图1 基于MA的目标跟踪WSN系统工作流程示意图

图2 WSN构建阶段系统内MA时序图
通常情况下,WSN构建阶段的工作在WSN的整个生命周期通常只需要执行一次,但是由于WSN节点故障的不确定性,应该在系统运行较长时间后,重新执行一次WSN构建阶段,提高目标跟踪WSN的可靠性。
2.2目标跟踪阶段
当有目标进入WSN探测范围时,节点n1探测到目标,sink节点GMMA请求节点n1发送目标探测信息,GMMA接收探测到目标消息,创建DMA进行处理,并在设定的条件下向GMMA发送系统进入目标跟踪阶段,具体流程如下:
1)GMMA通过create()方法创建DMA,DMA以节点n1为目的地(当GMMA收到多个节点发回的探测信息时,选择信号强度最大的节点作为n1),调用route()方法,计算sink节点至n1节点的路径。
2)DMA调用move()方法,迁移至n1节点。
3)DMA向n1及其周围节点发送request data消息。如果收到节点n1、n2和n3,发送的探测结果信息r1、r2、r3和节点位置信息s1、s2、s3,继续执行步骤5),如果没有收到信息,跳至步骤7)。
4)DMA接收到探测结果信息后,存入节点采集信息表,调用trilateration()方法,计算目标当前位置,并将计算结果xt存入目标信息表。
5)DMA调用filter()方法对目标位置数据xt进行滤波,得到目标位置滤波数据t,存入目标信息表。DMA判断是否符合结果回送GMMA条件,如果符合,DMA将目标信息表内数据发送至sink节点的GMMA,否则不进行任何操作。
6)根据滤波得到的目标运动状态,预测下一时刻目标的位置数据t+1,DMA选择距离t+1的节点作为下一个迁移节点n1,通过route()算法计算DMA 至n1的迁移路由,时间计数t=t+1,跳至步骤2)。
7)DMA未收到探测结果信息,认为目标已经离开WSN探测范围,将目标信息表内数据发送至sink节点的GMMA,并发送跟踪结束信息,DMA终止。
图3给出了本阶段系统内MA工作的时序图,上述流程描述的是WSN跟踪单目标时的工作流程,如果WSN跟踪网络内同时出现多个跟踪目标,GMMA需要同时创建多个DMA分别按照上述流程进行处理。
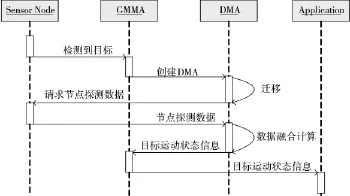
图3 WSN目标跟踪阶段系统内MA时序图
3 仿真实验
为了验证本文提出的MA-TWSN的基本性能,通过对一个匀速直线运动目标跟踪示例,分析系统性能。仿真条件如下:假定目标跟踪WSN的覆盖范围为100*100 m2,传感器节点数量为100,位置随机分布,sink节点位置确定,为(50,50),传感器的通信距离为15 m,探测距离为30 m,传感器采样间隔TN=1 s,目标初始节点位置(0,0),目标匀速直线运动,X方向速度vx=0.22 m/s,Y方向速度vy=0.19 m/s,节点探测结果数据的大小Nresult=0.1 kB,DMA和RMA代码段(Method)大小MAcode=1 kB,DMA向sink节点回送结果数据大小MAresult=0.2 kB,应用跟踪采样周期要求TS=5 s,仿真总时间t=400 s。定义变量单位负载量,单位负载量等于网络中传递数据的大小与数据传递距离的乘积,单位kB·m,它可以较好地反映WSN网络负载和节点能量消耗情况。为了避免节点位置随机带来的误差,进行蒙特卡罗仿真,仿真次数50次,本文提出的基于MA-TWSN单位负载量与C/S-TWSN单位负载量比值为0.85∶1,基于MA目标跟踪WSN性能优势明显。为了进一步验证提出基于MA目标跟踪WSN结构的有效性,对不同节点数目的WSN进行了仿真,并将结果进行归一化处理,如表1所示:

表1 不同节点数目下目标跟踪WSN结构单位负载量比较
从仿真结果不难看出,在WSN网络节点数目特别少时,基于MA-TWSN性能与基于C/S-TWSN性能接近,甚至性能还不如C/S-TWSN,这是由于节点特别少时,WSN节点间传递数据量较小,而MA-TWSN内MA的迁移会额外产生一部分数据单位负载,因此,性能一般。当节点数量逐渐增大时,MA-TWSN性能单位负载量明显低于C/S-TWSN,因此,在节点数量较多的情况下,MA-TWSN具有较大的性能优势。
4 结论
提出了一种基于移动代理的目标跟踪WSN体系结构,并对WSN中移动代理进行了分类,并为每种移动代理定义了结构,建立了基于移动代理的目标跟踪WSN工作流程,并通过仿真对比,验证了WSN网络节点数量较多时,提出的目标跟踪WSN体系结构具有较好的性能。本文只是提出了基于移动代理的目标跟踪WSN基本结构,若要将它应用于实际的目标跟踪环境,还需要对系统内移动代理的路由优化算法、数据滤波算法和移动代理容错性等问题进行深入的研究。
参考文献:
[1]CULLAR D,ESTRIN D,STRVASTAVA M. Overview of sensor network[J].Computer,2004,37(8):41-49.
[2]袁延昭.基于无线传感器网络的目标追踪算法研究[D].大连:大连理工大学,2007:1-4.
[3]QI H,IYENGAR S S,CHAKRABARTY K. Multi-resolution data integration using mobile agents in distributed sensor networks[J].IEEE Trans. Systems,Man and Cybernetics Part C:Applications and Rev,2001,31(3):383-391.
[4]PRATIK K B,QI H,XU Y Y.Mobile-agent-based collaborative sensor fusion[J]. Information Fusion,2008(9):399-411.
[5]XU Y Y,QI H R. Mobile agent migration modeling and design for target tracking in wireless sensor networks[J].AdHoc Networks,2008(6):1-16.
[6]CHEN M,KWON T,CHOI Y. Data dissemination based on mobile agent in wireless sensor networks[C]//Proc. IEEE LCN,2005:527-529.
[7]CHEN M,KWON T,CHOI Y,et al. Mobile agent based wireless sensor networks[J]. Journal of Computers,2006,1(1):14-21.
[8]CHEN M,GONZALEZ S,LEUNG V. Applications and design issues for mobile agents in wireless sensor networks[J]. Wireless Communications(S1530-8677),IEEE,2007,14 (6):20-26.
[9]WANG Y C,CHENG L L. Mobile agent for medium and high rate WSN[C]//International Conference on Computer Application and System Modeling,2010:333-337.
[10]LI D,Hu Y H. Least square solutions of energy based acoustic source localization problems[C]//Proceedings of the 2004 International Conference on Parallel Processing Workshops. Madison,USA,2004:443-446.
[11]SHENG X H,HU Y H. Maximum likelihood multiple-source localization using acoustic energy measurements with wireless sensor networks[J]. Transactions on Signal Processing,2005,53(1):44-53.
Design of Target Track WSN Architecture Based on Mobile Agent
CHEN Jia-jun1,XING Chang-feng1,WANG Xiao-bei2,WANG Dan-dan3
(1. College of Electronic Engineering,Naval University of Engineering,Wuhan 430033,China;2. College of Electrical Engineering,Naval University of Engineering,Wuhan 430033,China;3. Naval Flight Academy,Huludao 125001,China)
Abstract:In target track WSN,the mobile agent technique is introduced. It can visit sensor nodes and fusion data on the principle of selectivity. It is proposed that a kind of target track WSN architecture based on mobile agent. Mobil agents in network are classified and the function and framework of Mobil agent is defined. The target track work flow based on mobile agent is established. At last,the proposed architecture is proved to have great performance advantage to custom target track WSN architecture based on C/S in unit lord through simulation when net node number increasing.
Key words:target tracking,wireless sensor network,mobile agent,system architecture
中图分类号:TP31
文献标识码:A
文章编号:1002-0640(2016)05-0173-04
收稿日期:2015-03-25修回日期:2015-05-17
*基金项目:国防预研基金资助项目
作者简介:陈佳俊(1985-),男,湖北武汉人,博士,讲师。研究方向:移动代理系统建模与应用,信息作战指挥过程仿真。
