低温微位移促动器的设计与实验*
2016-07-09白清顺张庆
白清顺,王 群,张庆,娄 铮
(1. 哈尔滨工业大学机电工程学院,黑龙江 哈尔滨 150001;2. 中国科学院紫金山天文台,江苏 南京 210008)
低温微位移促动器的设计与实验*
(1. 哈尔滨工业大学机电工程学院,黑龙江 哈尔滨150001;2. 中国科学院紫金山天文台,江苏 南京210008)
摘要:以极地天文望远镜为应用背景,研制了一种低温微位移促动器,并在室温和低温条件下进行性能测试实验,获得了低温微位移促动器的性能指标。分析了3种常见的大行程高精度微位移促动器的结构形式,选择位移缩放式作为低温微位移促动器的基本结构。微位移促动器采用低温步进电机作为驱动元件,以具有特殊消隙结构的螺旋传动作为位移缩放机构,实现了高刚度、耐低温、结构紧凑、密闭性好的微位移促动器的设计。开展了微位移促动器的性能测试实验,结果表明:所设计的低温微位移促动器在室温条件下的步进精度达到1 μm ± 0.082 μm,并且满足负载能力的设计要求;低温条件下步进精度可以达到2 μm ± 0.404 μm。研制的微位移促动器将为拼接式极地天文望远镜的建设提供重要的技术支持。
关键词:微位移促动器;天文望远镜;精度;低温;螺旋传动
天文学的发展对天文望远镜提出了更高的要求,对于射电望远镜,增加望远镜口径是提高分辨率和灵敏度最为重要的途径。大型天线的反射面受加工制造技术的限制,无法使用单块面板实现。主动反射面技术为极大口径反射面的制造提供了重要的技术支撑,采用尺寸较小的子面板拼合成具有一定面形精度的主反射面。为了调整主反射面的面形,每个子面板需要微位移促动器支撑和调节[1]。
微位移促动器作为子面板的支撑和调节机构,是主动反射面技术的核心部件,是一种精密的直线位移输出装置。鉴于主反射面面形需要达到射电望远镜的成像要求,微位移促动器需要具有较高的位移输出精度、大负载能力、高刚度以及毫米级有效行程。目前,世界上已建成的采用主动反射面技术的射电望远镜主要采用自行研制的微位移促动器[2-4]。
天文望远镜的台址是望远镜观测效果的影响因素之一,优秀的望远镜台址需要具有干净的大气、较低的风速、较高的大气透过率和较低的水汽含量[5]。南极的高海拔地区便符合上述条件,特别是我国率先抵达的Dome A被公认为是地球上最优秀的光学/红外天文观测地点,而且非常适合亚毫米波和太赫兹天文观测[6]。我国已经在南极Dome A地区安装了小型天文望远镜,后期还计划建造大型太赫兹天文望远镜[7]。对于南极地区天文望远镜使用的微位移促动器,还要具有耐低温、结构紧凑、防风雪侵蚀等特点。
针对主动反射面技术对微位移促动器的性能要求,以及南极地区的环境条件,设计了一种低温微位移促动器,并对设计的促动器进行了性能检测实验,获得了促动器的性能指标。
1低温微位移促动器设计
1.1低温微位移促动器的结构形式
常用的大行程高精度微位移促动器的结构形式主要有3种:
(1)尺蠖式。尺蠖式微位移促动器是基于 “箝位-驱动-箝位” 的运动形式,以压电陶瓷、磁致伸缩材料、形状记忆合金等元件进行驱动的微位移促动器。这类驱动元件精度高、响应快,构成的尺蠖式微位移促动器理论上可以获得无限大的有效行程[8],但是尺蠖式微位移促动器的控制比较复杂,并且成熟的商品很少。
(2)位移缩放式。此类微位移促动器的结构形式是在驱动元件后附加位移缩放机构,位移缩放机构主要有减速器、液压减速机构、精密丝杠和柔性铰链等[9]。对于位移缩放机构的优劣,可以从缩放比、空回、迟滞、负载能力等几方面衡量。
(3)宏/微动叠加式。宏/微动叠加式微位移促动器分为宏动部分和微动部分,宏动部分完成大行程微米级定位,微动部分完成小范围的纳米级定位[10]。这种促动器的缺点是机械结构和控制系统都较为复杂。
相比(1)和(3)两种结构形式的微位移促动器,位移缩放式微位移促动器的结构比较简单,控制也较为方便,通过对驱动元件和位移缩放机构的组合,可以在大行程内输出较高精度的位移。因此,设计的低温微位移促动器采用位移缩放的结构形式。
1.2低温微位移促动器的设计
位移缩放式微位移促动器的设计包括驱动元件、位移缩放机构、导向机构、预紧机构的选择和整体支承框架的结构设计。表1是设计的低温微位移促动器的结构方案。
低温微位移促动器采用精密低温步进电机作为驱动元件。步进电机没有累积误差,并且技术成熟,采用电细分控制可以输出较小的步距角。导向键作为导向机构,简单实用,用于精密机械时要保证其加工精度。弹簧预紧,结构简单,价格低廉。缩放机构采用精密梯形滑动丝杠,选取较大的螺纹配合间隙,传动螺母采用特殊消隙结构,这样设计可以保证低温时丝杠不会卡死,并可以有效减小螺旋传动的回程差,小导程的螺纹结构紧凑,占用空间小,并且具有自锁功能。促动器的壳体采用圆柱状,两端盖装有左、右端盖,这样结构紧凑,壳体表面形状过渡圆滑,能够有效避免积雪,并且具有一定的密封性,防止风雪侵蚀内部零件。低温微位移促动器的外观如图1,整体包络尺寸为Φ75 × 120 mm。
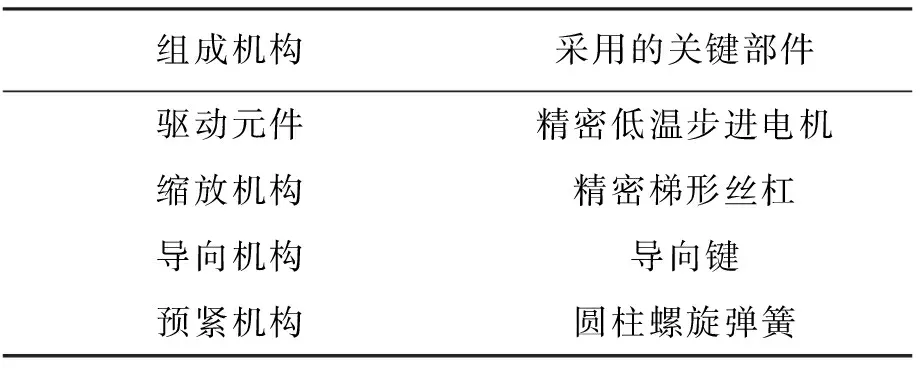
表1 低温微位移促动器的结构方案

图1 低温微位移促动器外观
低温微位移促动器的材料选择具有面心立方晶格的铬镍不锈钢,其冲击韧性与温度无关,具有良好的耐蚀性、耐热性、低温强度和机械特性,并且加工性能好,价格实惠。除步进电机和轴承等外购件外,其它零件都采用铬镍不锈钢,保证各零部件在低温条件下具有较为一致的温度形变。
对于低温微位移促动器的润滑,选择耐低温的低温极压润滑脂,保证低温环境下微位移促动器能够正常工作。低温微位移促动器的控制系统则由电脑、松下可编程逻辑控制器(Programmable Logic Controller, PLC)、步进电机驱动器、24 V稳压直流电源组成。控制程序的编制采用VC++ 6.0和松下可编程逻辑控制器通用的梯形图编程工具,满足促动器的开环性能测试要求。
2低温微位移促动器的性能测试
性能测试实验过程中,将低温微位移促动器安置于测量平台上,采用海德汉CT2502长度计对输出位移进行检测,并记录数据。同时设计了加力装置,测试促动器在空载和负载情况下的性能。在低温测试环节,将测量系统安置于低温试验箱内,温度降低到设定温度后进行保温,然后再开始测试,避免低温箱运行时压缩机产生的振动对测试带来不利影响。图2是室温环境下的促动器性能测试和低温测试。

图2 室温性能测试(左图)和低温测试(右图)
2.1室温环境下的步进精度检测
首先检测空载情况下的步进精度。测量过程中长度计的位置不变,电机驱动促动器输出端,分别以步长1 μm、2 μm、5 μm运动,每种步长运动20次,记录长度计读数,对比理论输出位移与实际输出位移,如图3~5,并计算3种步长的标准差和平均值,如表2。
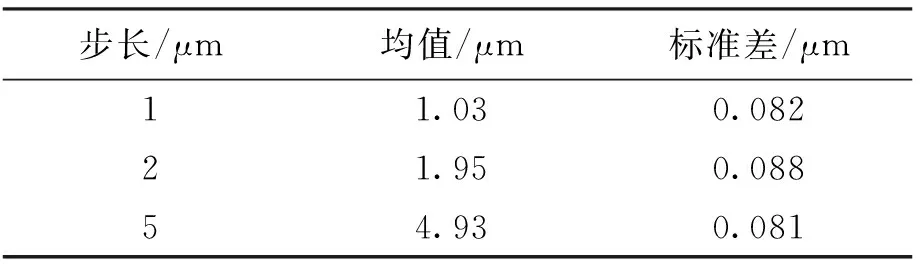
表2 3种步长的均值和标准差

图3 步进精度检测(1 μm步长)
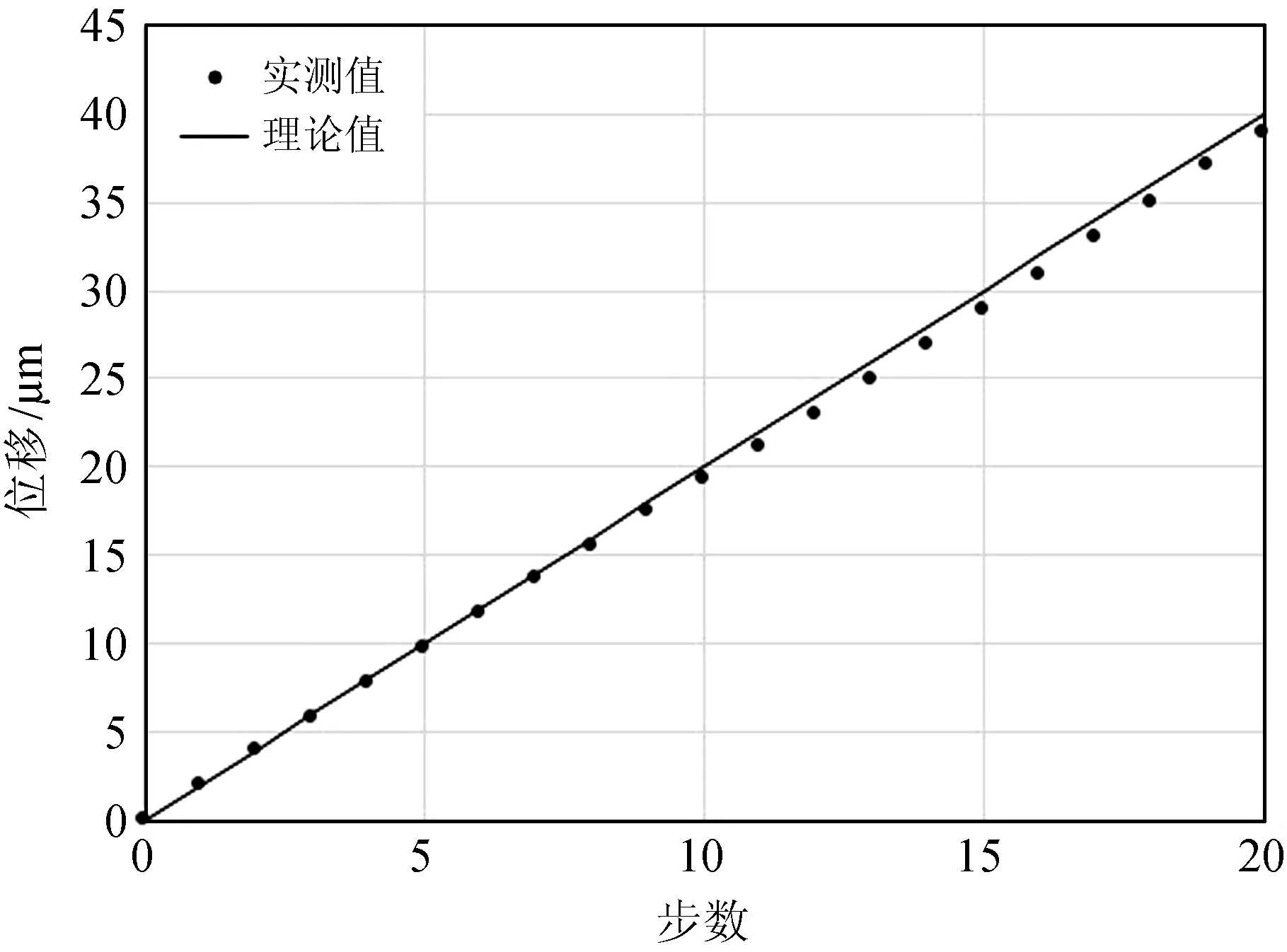
图4 步进精度检测(2 μm步长)
测试结果表明,室温环境下,促动器的空载步进精度可以达到1 μm ± 0.082 μm。根据设计要求,促动器的最大轴向压力负载需要达到60 N,考虑到负载裕量,将最大轴向压力负载放大约15%,检测促动器在68 N轴向压力负载作用下的1 μm步进精度,如图6。

图5 步进精度检测(5 μm步长)

图6 68 N轴向压力负载步进精度检测(1 μm步长)
得到位移促动器在68 N轴向压力负载下的步进精度为1 μm ± 0.114 μm。可见,由于负载的影响使得促动器的步进精度有所下降,但是影响很小。
2.2室温环境下的重复定位精度检测
重复定位精度的检测方法如图7,首先驱动促动器的输出端运动到某一位置,记此位置为点A,然后将长度计显示的数据清零,从A点以步长10 μm运动到F点,在F点反向回到A点,记录长度计数据。重复实验5次,并进行标准差的统计分析。测试数据如表3。
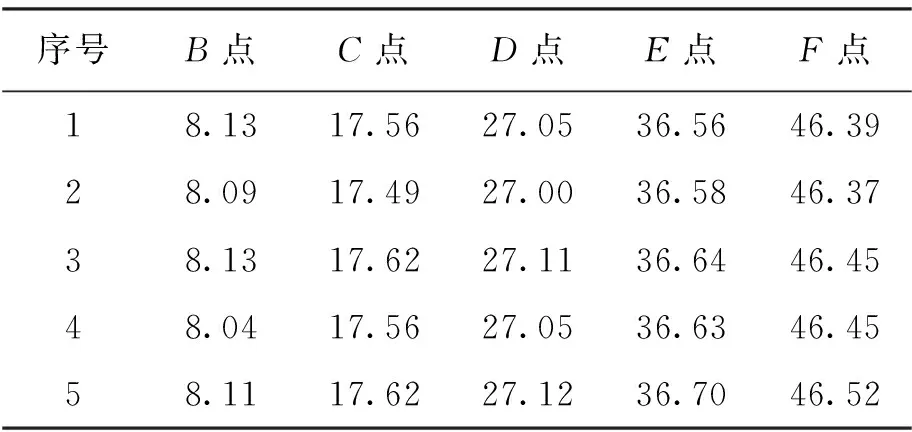
表3 重复定位精度测试数据(单位: 微米)
表3显示重复定位精度测试中B点的数据与理论数值(10 μm)相差较大,原因在于促动器存在回程误差,在A点换向后向B点运动时,一部分理论输出位移被回程差抵消,但是不影响重复定位精度的检测。计算表3中每个位置处5组实验数据的标准差,如表4。得到标准差的最大值为0.052 μm,则促动器在室温下的重复定位精度为± 0.052 μm。
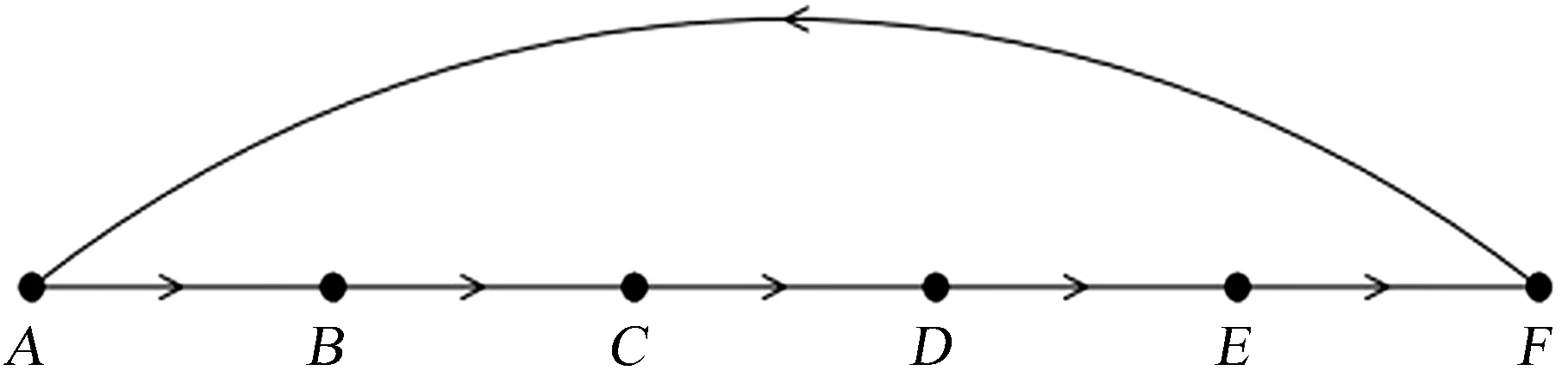
图7 重复定位精度测试方法

表4 5组实验数据的标准差(单位: 微米)
2.3低温环境下的步进精度检测
对于低温微位移促动器,其低温环境下的性能同样重要。根据设计要求,促动器工作环境的最低温度为-40 ℃,因此需要检测促动器在-40 ℃环境下的步进精度。
在低温箱温度降到-40 ℃,并保温一小时后,促动器表面结霜严重,部分区域结冰,促动器整体温度降低到-40 ℃,此时促动器可以正常运行,并无卡死、振动、噪声等不良现象。采用常温性能测
试的方法检测低温微位移促动器在-40 ℃时的步进精度,如图8。结果表明,促动器在-40 ℃环境下可以达到2 μm ± 0.404 μm的步进精度。低温测试环节的霜冻和冰冻现象如图9。
对比常温下的步进精度,-40 ℃环境下的步进精度所有恶化,原因在于微位移促动器安置在低温箱内,由于温度的限制,测试端必须处在低温箱外。从驱动端到测试端连接部件的刚度对促动器的步进测试精度产生显著的影响;另外,测试时低温箱内存在的微振动也对测试结果造成一定的干扰。后期对低温测试方式的改进将进一步提高微位移促动器的低温步进测试精度。

图8 -40 ℃步进精度检测(2 μm步长)

图9 低温测试环节的结霜和结冰现象
3结论
本文设计了一种用于主动反射面技术的低温微位移促动器,并进行了一系列性能测试。测试结果表明,设计的低温微位移促动器在室温条件下的步进精度达到1 μm ± 0.082 μm,并且满足负载能力的设计要求。在轴向负载68 N情况下,促动器可以达到1 μm ± 0.114 μm的步进精度。重复定位精度测试表明,低温微位移促动器的重复定位精度为± 0.052 μm。低温测试结果表明,促动器在-40 ℃环境下可以达到2 μm ± 0.404 μm的步进精度。综合测试结果表明,低温微位移促动器能够满足相关技术要求。该促动器的研究为未来极地天文望远镜的建设提供基础技术条件。
参考文献:
[1]程景全. 天文望远镜原理和设计[M]. 北京: 中国科学出版社, 2003: 145-159.
[2]Lacasse R J. Green Bank Telescope active surface system[C]// Proceedings of SPIE. 1998: 310-319.
[3]Zhou Guohua, Li Aihua, Yang Dehua, et al. Development of a compact precision linear actuator for the active surface upgrade of the Delingha 13.7-m radio telescope[C]// Proceedings of SPIE. 2012: 1-8.
[4]Orfei A, Morsiani M, Zacchiroli G, et al. Active surface system for the new Sardinia Radiotelescope[C]// Proceedings of SPIE. 2004: 116-125.
[5]彭亚杰, 季凯帆, 梁波, 等. ASCOM在选址望远镜远程控制中的可用性研究[J]. 天文研究与技术——国家天文台台刊, 2013, 10(1): 49-54.
Peng Yajie, Ji Kaifan, Liang Bo, et al. The usability of the ASCOM in remote control of a site-survey telescope[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2013, 10(1): 49-54.
[6]Yuan Xiangyan, Cui Xiangqun, Liu Genrong, et al. Chinese Small Telescope Array (CSTAR) for Antarctic Dome A[C]// Proceedings of SPIE. 2008: 1-8.
[7]Yang Ji, Zuo Yingxi, Lou Zheng, et al. Conceptual design studies of the 5 m terahertz antenna for Dome A, Antarctica[J]. Research in Astronomy and Astrophysics, 2013, 13(12): 1493-1508.
[8]宋岩, 陈小安, 梁德沛. 新型尺蠖式爬行机器人的设计及样机研制[J]. 机械设计与制造, 2008(1): 179-181.
Song Yan, Chen Xiaoan, Liang Depei. Design of new inchworm crawling robot and its prototype study[J]. Machinery Design & Manufacture, 2008(1): 179-181.
[9]邵亮, 杨德华, 陈昆新, 等. 光学天文望远镜用微位移驱动器机构研究综述[J]. 天文学进展, 2009, 27(1): 70-79.Shao Liang, Yang Dehua, Chen Kunxin, et al. Review of mechanical structure of micro-displacement actuator for optical astronomical telescope[J]. Progress in Astronomy, 2009, 27(1): 70-79.
[10]陈立国, 孙立宁, 边信黔, 等. 面向微操作的宏/微精密定位技术研究[J]. 组合机床与自动化加工技术, 2005(5): 49-57.
Chen Liguo, Sun Lining, Bian Xinqian, et al. Macro/micro positioning technique for micromanip-ulation[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2005(5): 49-57.
The Design and Test of a Cryogenic Micro-Displacement Actuator

(1. School of Mechatronics Engineering, Harbin Institute of Technology, Harbin 150001, China, Email: dehuiwq@live.com;2. Purple Mountain Observatory, Chinese Academy of Sciences, Nanjing 210008, China)
Abstract:Taking the polar astronomical telescope as application background, a cryogenic micro-displacement actuator is designed and then tested at room temperature and low temperature environment respectively. Performance parameters of this actuator is acquired. Three kinds of structural forms of long travel high-accuracy micro-displacement actuator are analyzed; the displacement scaling is chosen as the basic structure of this cryogenic micro-displacement actuator. Cryogenic step motor is employed as the drive element, and the screw drive mechanism which contains specific anti-backlash structure is selected as the displacement scaling mechanism. This design develops a micro-displacement actuator which maintains satisfactory qualities such as high stiffness, low temperature resistance, compact structure and good leakproofness. Performance tests are also carried out. Test results indicate that the cryogenic micro-displacement actuator can achieve the step accuracy of 1μm ± 0.082μm at ambient temperature, and its load capacity meets the design requirements; meanwhile, the cryogenic micro-displacement actuator can achieve the step accuracy of 2μm ± 0.404μm at low temperature. This cryogenic micro-displacement actuator will provide important technical support for the construction of the splicing polar astronomical telescope.
Key words:Micro-displacement actuator; Astronomical telescope; Accuracy; Cryogenic; Screw drive
收稿日期:2015-05-31;
修订日期:2015-06-12
作者简介:白清顺,男,副教授. 研究方向:精密机械设计与制造. Email: qshbai@hit.edu.cn 通讯作者:王群,硕士. 研究方向:微促动器技术. Email: dehuiwq@live.com
中图分类号:P111; TH751
文献标识码:A
文章编号:1672-7673(2016)02-0199-06
CN 53-1189/PISSN 1672-7673