高频单历元GPS周期性误差特性分析
2016-07-08邓兴升尹梁波彭思淳
邓兴升 尹梁波 彭思淳
1 长沙理工大学交通运输学院,长沙市万家丽南路2段960号,410114
高频单历元GPS周期性误差特性分析
邓兴升1尹梁波1彭思淳1
1长沙理工大学交通运输学院,长沙市万家丽南路2段960号,410114
摘要:分析GPS高频单历元时间序列中的误差特性,采用中值滤波法消去高频噪声。经计算,偶然中误差在水平方向为±4~4.5 mm,高程方向为±9 mm。通过周期性重复解算、时间序列比对及相关系数最大化发现,GPS高频单历元时间序列中包含的周期性系统误差的重复周期为86 153~86 165 s。通过对系统误差建模或差分,可消除时间序列中的系统性成分,提高GPS高频单历元数据处理的精度。
关键词:高频单历元GPS; 周期性误差; 特性分析
高频单历元GPS动态定位技术可以获得每个观测历元动态站与基准站之间的三维坐标差信息,在工程中有广泛的应用,例如工程变形监测、航空飞行器和船舰的瞬时定位测速定姿等[1]。由于基准站可设置在400~500 km之外,能在短时间内快速获取三维震动信息,完整记录下较大的震幅,因此高频单历元GPS技术为地震研究提供了新的途径,成为近年来GPS地震学的重要技术支撑。在测量精度方面,高频单历元GPS可获得从cm到mm不等的精度[2-7]。实践表明,高频单历元GPS易受高频噪声的影响,还容易受到长周期的多路径效应误差的影响,在工程应用中必须掌握这些误差的特性,识别并对其进行分离处理,以减弱或消除其影响。
GPS的一些误差源与卫星和接收机之间的几何关系相关,可以利用GPS的周期性运行来消除其影响[8]。一些研究团队已经在这方面做了大量工作,其共同点是假设GPS卫星的重现周期是一个恒星日[9-11]。而Seeber等[12]第一次注意到GPS的重现周期不是一个恒星日,而且不同的卫星重现周期不同。一些学者开展了GPS卫星重现周期的研究,方荣新、范朋飞等[13-14]采用广播星历和精密星历分别计算了GPS卫星轨道重复周期。
本文针对高精度高频单历元GPS动态定位中的误差分析与处理问题,基于200~500 m近距离的高大桥梁GPS监测数据、45~70 km远距离CORS基准站数据进行双差解算,获得三维坐标差时间序列。采用中值滤波技术滤去时间序列中的高频噪声,并估计偶然中误差的大小。从滤去偶然误差的时间序列中,采用最大相关系数法对齐两时间序列(两时间序列对齐后,最大相关系数达到0.88),求得GPS卫星重现周期。计算发现,高频单历元GPS时间序列的重复周期为86 153~86 165 s,具有整恒星日周期特性;在北、东、高程方向,时间周期性具有3~12 s不等的差异,与Seeber等[12]的发现类似。
1偶然误差与中值滤波
高频单历元GPS时间序列中伴随着高频随机噪声,这种噪声符合偶然误差的4个特性,可采用中值滤波进行去噪。中值滤波算法的基本原理是将序列中某一点的值,用该点的一定大小邻域中各点值的中位值(非平均值)进行相应代换,具体实现过程是将滤波窗口中的数据按从大到小或从小到大的顺序排列,然后取该组序列中的中位值。
某高大桥梁主桥墩高达200 m,采用高频单历元GPS监测其变形。图1是其中0698#点监测结果北方向的位移过程线,包括原始信号、中值滤波结果、滤波后的残差,滤波残差由原始信号减去滤波信号得到。由图1可知,中值滤波成功地滤去了高频噪声。
图2显示了58 000个滤波残差的统计性质:单峰、有界、对称、0均值,接近或服从正态分布,表明中值滤波滤去的分量为偶然误差。

图1 监测点0698#北方向的位移过程线及其高频噪声Fig.1 The north displacement of point 0698# and its high rate noise
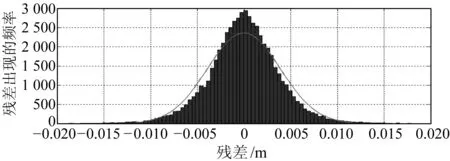
图2 监测点0698#北方向中值滤波后的残差分布Fig.2 The north residual error distributionof point 0698# after median filtering
对不同实例偶然误差的中误差进行计算。在本大桥监测项目中,高频单历元GPS偶然中误差结果分别是:北方向±4.0 mm,东方向±4.5 mm,高程方向±9.0 mm。
2周期性系统误差
高频单历元GPS双差时间序列中的偶然误差消除之后,还存在某种系统性成分。多路径效应是一种典型的周期性系统误差,它与卫星高度角和接收机高度有关。通常,接收机高度角是固定的,而卫星高度角随时间不断变化,即卫星和接收机间的几何关系是变动的。GPS卫星的运动具有周期性,约每11 h 58 min绕地球1圈,即约半个恒星日。那么,多路径效应的周期是否也为半个恒星日,需要试验研究。
为了评价两个时间序列a、b是否具有相关性,采用线性相关性系数指标lc来度量:
(1)
其中,n为时间序列a、b的长度,mean(·)为求平均值。线性相关系数lc越接近1,表明两时间序列的相关性越强。
试验数据采用某CORS系统CZAR、CZYX、CZZX、CZLW、CZYZ共5个基准站的长期观测数据。CORS基准站具有较好的观测条件,15°高度角无障碍,数据连续采集无中断,采样频率为1 s。采用WinTrack高频单历元GPS双差解算软件进行计算时,以CZYX为固定站,其他为监测站。
2.1半恒星日周期
图3~5分别是CZZX站北、东、高程方向相对于CZYX基准站的相对位移过程线,其中实线为2012年第153天UTC11:02~12:00,虚线为23:00~23:58,时间差为11 h 58 min。由于半恒星日中,GPS运行轨道提前2 min重复,所以截去未重复的120个历元。
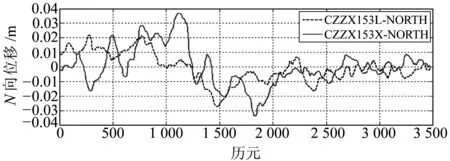
图3 半恒星日CZZX北方向的位移过程线Fig.3 The north displacement of CZZX in half sidereal day

图4 半恒星日CZZX东方向的位移过程线Fig.4 The east displacement of CZZX in half sidereal day
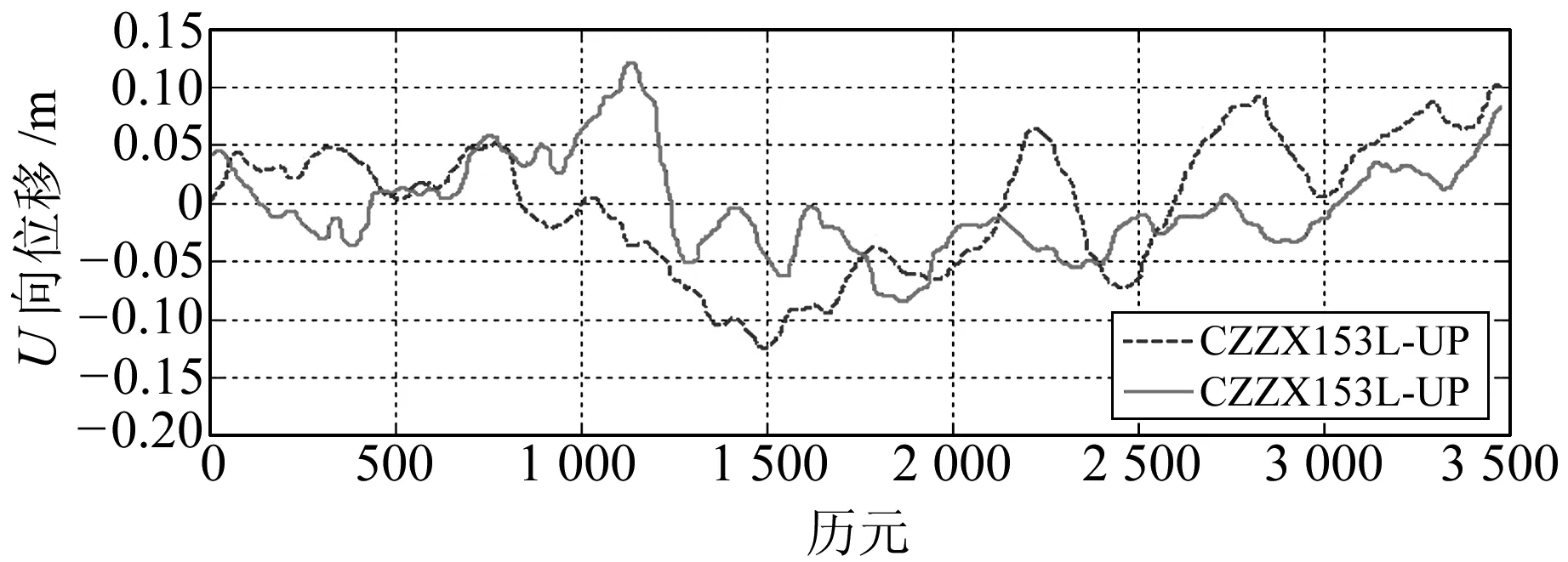
图5 半恒星日CZZX高程方向的位移过程线Fig.5 The up displacement of CZZX in half sidereal day
由图3~5可知,两时间序列吻合较差,相关性不显著。将GPS轨道重复周期分别提前110~130 s,计算两时间序列的相关系数,其结果如图6所示。
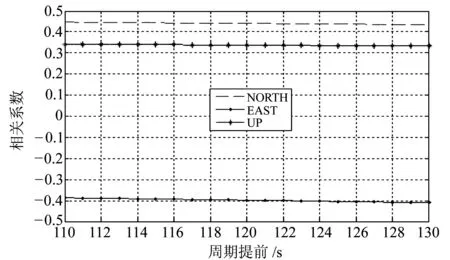
图6 半恒星日CZZX站3个方向的相关系数Fig.6 Three directions correlation coefficient of CZZX in half sidereal day
经计算,在半恒星日中,GPS轨道周期提前重复的110~130 s中,CZZX站北方向相关系数从0.433 2变化至0.445 3;东方向出现负相关,其值从-0.409 2变化至-0.386 7;高程方向从0.332 0变化至0.340 6。图3~图6表明,虽然GPS轨道重复周期为半个恒星日,但是GPS高频单历元的系统误差在半个恒星日中不具有周期性。
2.2整恒星日周期
由§2.1可知,GPS高频单历元的系统误差在半个恒星日中不具有周期性。其原因在于,在卫星运动的同时,地球本身也在自转,若以地面上一个点为参考点,GPS卫星运动周期则应该为一个完整的恒星日。也就是说,高度角的变化周期是一个整恒星日周期。所以,多路径效应周期同样应该是一个整恒星日[14]。图7~9分别是CZZX站北、东、高程方向相对于CZYX基准站的相对位移过程线,其中虚线为2012年第153天约UTC 23:04~24:00,实线为2012年第154天约UTC 23:00~23:56,时间差为23 h 56 min(注:时间在s上有差异)。

图7 整恒星日CZZX北方向的位移过程线Fig.7 The north displacement of CZZX in one sidereal day
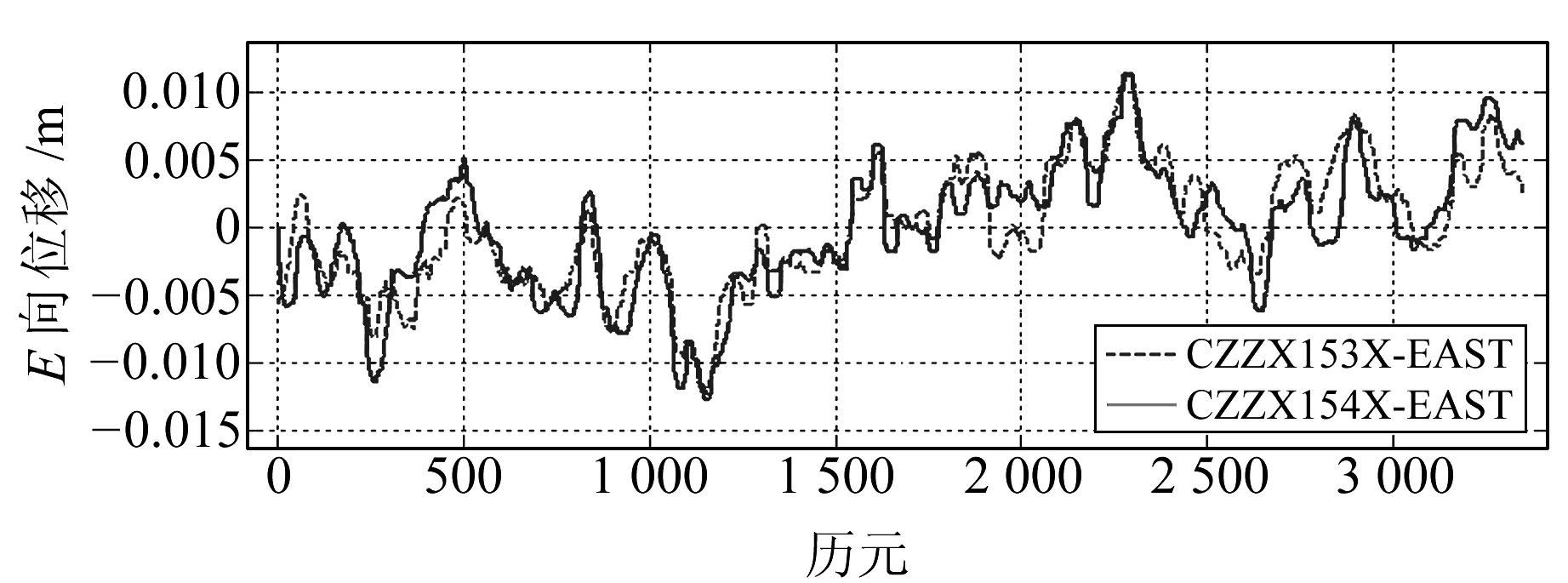
图8 整恒星日CZZX东方向的位移过程线Fig.8 The east displacement of CZZX in one sidereal day

图9 整恒星日CZZX高程方向的位移过程线Fig.9 The up displacement of CZZX in one sidereal day
由图7~9可知,两时间序列吻合良好,说明二者具有显著的相关性。将GPS轨道重复周期分别提前220~260 s,计算两时间序列的相关系数,其结果如图10所示。

图10 整恒星日CZZX站3个方向的相关系数Fig.10 Three directions correlation coefficient of CZZXin one sidereal day
经计算,在一个整恒星日24 h中,GPS轨道重复周期提前的220~260 s中,CZZX站北方向相关系数最大值为0.829 7,出现在提前的238 s,GPS轨道重复周期为86 162 s;东方向为正相关,且相关性比其他两方向好,最大值为0.880 7,出现在247 s,轨道重复周期为86 153 s;高程方向最大相关系数为0.802 5,出现在235 s,轨道重复周期为86 165 s。图7~10表明,GPS高频单历元的系统误差是以大约一个整恒星日为周期的,重复周期范围为86 153~86 165 s,北、东、高程方向在周期上具有3~12 s的不一致性。
3结语
1)高频单历元GPS变形监测时间序列中包含高频噪声,这种高频噪声的统计特性符合偶然误差的4个性质,可以通过中值滤波方法较好地滤去。试验表明,水平方向与高程方向受偶然误差影响的程度不同,水平方向偶然中误差为±4~-4.5 mm,高程方向为±9 mm。
2)高频单历元GPS时间序列经中值滤波滤去高频噪声后,仍然存在周期性系统误差,其周期不是半个恒星日,而是大约一个整恒星日,每个重复周期大约提前235~247 s,与GPS卫星轨道周期基本一致。北、东、高程方向重复周期并不一致,其差异值为3~12 s。
3)高频单历元GPS系统误差具有周期性,因此在数据处理中建立精准的系统误差改正模型是可能的。然而该系统误差较为复杂,并不能用简单多项式表达。神经网络或支持向量机具有逼近任何复杂函数的能力,是高频单历元GPS周期性系统误差建模的可行方法。
参考文献
[1]李林红, 何秀凤. 利用动态定位模块Track进行GPS单历元定位研究[J]. 全球定位系统, 2011(6):37-40 (Li Linhong, He Xiufeng. Single Epoch GPS Positioning with Track Module[J]. GNSS World of China, 2011(6):37-40)
[2]ChenY Q, Huang D F, Ding X L. Measurement of Vibration of Tall Building With GPS: A Case Study [C].SPIE,2001
[3]戴吾蛟. GPS精密动态变形监测的数据处理与方法[D]. 长沙:中南大学,2007 (Dai Wujiao. A Study of Data Processing for Precise Dynamic Deformation Monitoring Using GPS [D]. Changsha:Central-South University,2007)
[4]Langbein J, Bock Y.High-Rate Real-Time GPS Network at Parkfield: Utility for Detecting Fault Slip and Seismic Displacements[J]. Geophys Res Lett, 2004, 31(15):289-302
[5]Genrich J F, Bock Y. Instantaneous Geodetic Positioning with 10-50 Hz GPS Measurements: Noise Characteristics and Implications for Monitoring Networks[J]. Journal of Geophysical Research Atmospheres, 2006, 111(B3):1 581-1 600
[6]Xu P L, Shi C, Fang R X, et al. High-Rate Precise Point Positioning (PPP) to Measure Seismic Wave Motions: An Experimental Comparison of GPS PPP with Inertial Measurement Units [J]. J Geod,2013,87: 361-372
[7]Bilich A, Cassidy J F, Larson K M. GPS Seismology: Application to the 2002 Mw7.9 Denali Fault Earthquake[J]. Bull Seismol Soc Am,2008(98): 593-606
[8]苏小宁. 高频GPS单历元定位方法及其在地震学中的应用研究[D]. 北京:中国地震局地震预测研究所,2011 (Su Xiaoning. Study on High-Rate Epoch by Epoch GPS Positioning and Its Application in Seismology[D]. Beijing:Institute of Earthquake Science, CEA,2011)
[9]Bock H, Dach R. High-Rate GPS Clock Corrections from CODE: Support of 1 Hz Applications[J]. Journal of Geodesy, 2009,83(11): 1 083-1 094
[10]Yokota Y, Koketsu K, Hikima K, et al. Ability of 1 Hz GPS Data to Infer the Source Process of A Medium-Sized Earthquake: the Case of the 2008 Iwate-Miyagi Nairiku, Japan, Earthquake[J]. Geophys Res Lett,2009, 36(12)
[11]Zhong P, Ding X. Sidereal Filtering Based on Single Differences for Mitigating GPS Multipath Effects on Short Baselines[J]. Journal of Geodesy,2009, 84(2): 145-158
[12]Seeber G, Menge F, Volksen C,et al.Precise GPS Positioning Improvements by Reducing Antenna and Site Dependent Effects[A]∥Advances in Positioning and Reference Frames[M].Springer, 1998
[13]方荣新. 高采样率GPS数据非差精密处理方法及其在地震学中的应用研究[D]. 武汉:武汉大学,2010 (Fang Rongxin. High-Rate GPS Data Non-Difference Precise Processing and Its Application on Seismology [D]. Wuhan: Wuhan University,2010)
[14]范朋飞. 高精度 GPS 站点坐标时间序列分析与应用[D]. 西安:长安大学, 2013 (Fan Pengfei. Analysis and Application of High-Precision Coordinate Time Series of GPS Site [D]. Xi’an:Chang’an University,2013)
Foundation support:Open Fund of Engineering Laboratory of Spatial Information Technology of Highway Geological Disaster Early Warning in Hunan Province,Changsha University of Science & Technology,No.kfj150602; Land and Resources Department Scientific Research Project of Hunan Province,No.2013-27; Education Department Scientific Research Project of Hunan Province,No.13C1011.
About the first author:DENG Xingsheng, PhD, associate professor,majors in GNSS dynamical positioning, E-mail:whudxs@163.com.
Analysis of Periodic Error Characteristics for High-Rate Single-Epoch GPS Solutions
DENGXingsheng1YINLiangbo1PENGSichun1
1School of Traffic and Transportation, Changsha University of Science & Technology,960 2nd Segments of South-Wanjiali Road, Changsha 410114, China
Abstract:This paper analyzes the error characteristics of high-rate single-epoch GPS time series and uses the median filtering method to eliminate the high rate noise. Through calculation we determine that the accidental error in the horizontal direction is ±4.0-4.5 mm and in the elevation direction it is ±9 mm. By periodically repeating solutions, comparing the time series, and maximizing the correlation coefficient, the periodic system error is discovered in the high-rate single-epoch GPS time series. The repetition period is from 86 153 to 86 165 seconds. Through modeling or differencing the system errors, the system components can be eliminated from the time series, thus improving the data processing accuracy of high-rate single-epoch GPS.
Key words:high-rate single-epoch GPS solution;periodic error; characteristics analysis
收稿日期:2015-07-20
第一作者简介:邓兴升, 博士, 副教授, 主要研究方向为GNSS动态定位,E-mail: whudxs@163.com。
DOI:10.14075/j.jgg.2016.07.002
文章编号:1671-5942(2016)07-0570-04
中图分类号:P228
文献标识码:A
项目来源:长沙理工大学公路地质灾变预警空间信息技术湖南省工程实验室开放基金(kfj150602);湖南省国土资源厅科研项目(2013-27);湖南省教育厅科研项目(13C1011)。
