汽车自适应前照灯系统的研究
2016-07-08张一西凌子红张星月
张一西,凌子红,张星月
(长安大学汽车学院,陕西 西安 710064)
汽车自适应前照灯系统的研究
张一西,凌子红,张星月
(长安大学汽车学院,陕西 西安 710064)
摘 要:针对传统汽车照明系统行驶无法调节照明角度、在弯道内侧易出现盲区等问题,提出了一种前照灯弯道自适应照明系统。以汽车安全刹车距离为有效照明的判断依据,建立前照灯水平方向偏转的数学模型,得到车速、方向盘转角与前照灯水平偏转角度间的关系,并对系统硬件部分进行了选择,给出了汽车AFS系统的控制策略。
关键词:自适应前照灯系统;软硬件设计;控制策略
10.16638/j.cnki.1671-7988.2016.04.031
CLC NO.: U463.9Document Code: AArticle ID: 1671-7988(2016)04-92-03
引言
汽车前照灯系统是汽车上最重要的主动安全设备之一[1],而传统的前照灯系统存在着照明光光型单一、无法根据实时路况来调整照明角度、弯道行驶时弯道内侧存在照明盲区等缺陷。基于上述问题,出现了一种汽车自适应前照灯系统(AFS),通过综合利用各种传感器技术,采集路面上的各种信息,自动控制前照灯进行实时动态的光照调节,显著提高了行车安全性[2]。
1、AFS系统组成
如图1所示,为汽车AFS系统结构图,汽车AFS系统硬件部分主要由AFS控制模块、传感器模块以及执行机构等组成。

图1 汽车AFS结构图
系统的工作原理为:启用AFS系统后,当汽车进入弯道或在其他情况下进入转弯模式时,通过安装在汽车上的各种传感器,实时采集车速、方向盘转角、光照信号等[3-4],输入系统的控制单元,其通过内置的控制算法计算出此时前照灯应偏转的角度,最后向步进电机发出执行命令,完成角度偏转,满足弯道自适应照明的需求。
2、汽车弯道自适应系统建模
汽车安全刹车距离(包括反映距离和制动距离)是判断前照灯有效照明的一个很重要的指标,当前照灯的有效照明能覆盖到汽车安全刹车距离的时候,就认为驾驶员有足够的视野和刹车时间来使汽车急停而不发生碰撞[5]。
如图2所示,为汽车弯道行驶时水平方向偏转模型,由此得前照灯水平方向偏转角度、转弯半径、安全刹车距离间的关系:

图2 汽车转弯水平方向偏转模型

式中:S为汽车安全刹车距离(m);L为制动距离(m);v为车速(km/h);t为反应时间(S);R为转弯半径(m);α为前照灯水平方向偏转角度(°)。则:

又由图2,得转弯半径与车轮转角间有:

式中θ为车轮转角,D为轴距。且方向盘转角与车轮转角之间成一定比例关系:

δ为方向盘转角,K为比例系数。由此得前照灯水平方向偏转角度计算公式为:

3、系统硬件设计
3.1 传感器
汽车AFS系统传感器模块主要包括车速传感器、方向盘转角传感器和光敏传感器。
车速传感器分为电磁式、霍尔式和光电式[6],用来采集当前车速信号。光电式车速传感器输出为6~8V的脉冲信号,信号的频率与车速呈正相关,通过传感器自身得到频率变化信号,直接查表便可得出车速,因此一般选择光电式车速传感器。
方向盘转角传感器分为脉冲式和电压式[6],用来采集方向盘转角信号。由于电压式方向盘转角传感器的方向盘转角与输出电压成线性比例,确定输入电压后,若能得知传感器输出信号的电压量,便可得出方向盘转动的角度。此外,该种传感器的信号由控制单元的A/D(模数转换器)釆集,测量范围较大,因此选择电压式的转向盘转角传感器。
光敏传感器测得车前的能见度值输入到ECU,ECU将接收到的能见度值与系统预先存储的标准值进行对比,进一步确认前照灯是否需要被开启,从而实现AFS系统的自动开启和关闭功能。
3.2 控制单元
控制单元是汽车AFS的核心。如图3所示,为控制系统设计框图,ECU根据采集的车速信号、方向盘转角信号、光敏信号等,通过内置的控制算法计算出对应的前照灯水平方向偏转角度,驱动步进电机转动车灯。与此同时,ECU还能监测步进电机和传感器的运行状况,对步进电机和传感器进行故障诊断,通过CAN总线反馈给车身网络[7]。从AFS的控制过程可以看出,AFS控制单元由电机驱动模块、电子控制模块和信号采集模块组成,一个主控制器和两个从控制器构成了AFS的电子控制模块。采集来的车速、转向盘转角和光敏信号等高速CAN(Controller Area Network,控制器局域网络)总线信号输入给主控制器,经过复杂的控制算法和逻辑运算,得到期望的前照灯照射角度,并通过LIN(Local Interconnect Network,串行通讯网络)总线传输给左右两个从控制器,由从控制器传达给驱动电机,从而实现照射角度的实时动态变化。
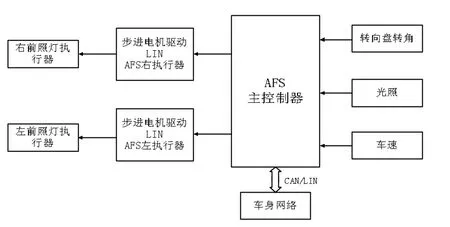
图3 控制系统设计框图
3.3 执行机构
执行机构一般是由电机组成,而电机有三种,即直流电机、交流电机和步进电机。步进电机、交流电机和直流电机分别是通过脉冲占空比、交流电的相位和直流电压来调节转速的。由于步进电机能将电脉冲信号转变为线位移,并且具有动作平稳和工作寿命长等优点,所以AFS系统执行电机一般选用步进电机。
4、软件设计
汽车AFS控制系统主程序流程如图4所示。首先系统进行故障自检,若出现故障,则显示故障,若无故障则光敏传感器开始采集车前光照信号,
将车前的能见度值输入到控制单元ECU,ECU将该值与系统预先存储的能见度标准值进行对比,若大于标准值且前照灯为开启状态,则将其关闭,若小于标准值,则开启前照灯自适应装置,通过光敏传感器来实现前照灯自适应装置的自动开启和关闭功能。车速传感器获取车速信号后,系统对车速进行判断,若大于5km/h则需对前照灯实施控制,此时方向盘转角传感器获取转角信号,这些信号都输入控制单元ECU,根据预设的计算公式得到此时前照灯需要在水平方向偏转的角度。ECU向执行机构发出控制指令,驱动步进电机,从而控制前照灯偏转一定的角度。
5、总结

图4 主控制流程图
本文就汽车AFS系统的工作原理、前照灯水平方向偏转数学模型、硬件选择等方面进行了一定的研究,实现了汽车弯道行驶时,前照灯的智能调节,显著提高了行车安全性,达到了自适应的目的。随着科技的进步和人们对汽车安全的追求越来越高,汽车AFS所实现的功能也越来越多,例如借助与GPS,AFS能有效地预知即将到来的环境状况并能提前做出反应,即现有的可预见性AFS系统(P-AFS)[8],汽车自适应前照灯系统正朝着更安全、更环保、更人性化的趋势发展。
参考文献
[1] 朱敏慧.法雷奥已经或即将实用化的汽车新技术[J].汽车与配件,2003,11(22):88-91.
[2] 张献军,孙新普,李海方.汽车前照灯光束水平调节系统的分析[J].汽车电器,2009(8):11-15.
[3] 郑志军.带CAN总线的汽车智能前照灯系统设计[D].上海:上海交通大学出版社, 2007.8:18-22.
[4] 杨召君,朱向冰,许小晴.自适应前照灯的控制技术研究光源与照明[J].2010,6(58):19-23.
[5] 束华明,高明煜,王园园.基于单片机控制的汽车前照灯自适应系统[J].电子测量与仪器学报,2008(68):6-12.
[6] 郑志军.带CAN总线的汽车智能前照灯系统设计[D].上海:上海交通大学出版社, 2007.8:18-22.
[7] 肖红,王洪佩,高松,郎华.基于单片机控制的汽车自适应前照灯系统[J].制造业自动化,2011,8(51):55-60.
[8] 郑志军.智能前照灯系统的发展[J].中国照明电器,2006(6):8-11.
中图分类号:U463.9
文献标识码:A
文章编号:1671-7988(2016)04-92-03
作者简介:张一西,就读于长安大学汽车学院。
Research on auto adaptive front light system for vehicles
Zhang Yixi, Ling Zihong, Zhang Xingyue
(Chang’an university School of automobile, Shaanxi xi’an 710064)
Abstract:In view of the traditional automotive lighting system can not adjust illumination angels, appear the blind section at the inside of the bend, put forward a headlamp adaptive lighting control system at the curve. Basing on the auto safety brake distance, a mathematical model of adaptive lighting control system was established , research the relationship between the auto speed and steering wheel angel with the lights level angel, and design the hardware of the control system, a control strategy is presented.
Keywords:AFS; design of software and hardware; control strategy.