汽车主动悬架的模糊控制研究
2016-07-08张好好高乐张伟
张好好,高乐,张伟
(长安大学汽车学院,陕西 西安 710064)
汽车主动悬架的模糊控制研究
张好好,高乐,张伟
(长安大学汽车学院,陕西 西安 710064)
摘 要:文章首先对汽车主动悬架进行动力学分析,建立了1/4车主动悬架动力学模型。根据所建立的模型,把模糊控制运用到主动悬架系统中,通过控制主动力的大小来使悬架性能达到最优状态;最后以某型车的参数进行仿真研究,仿真结果表明:基于模糊控制的主动悬架具有很好的性能。
关键字:主动悬架;动力学模型;模糊控制
10.16638/j.cnki.1671-7988.2016.04.024
CLC NO.: U463.8Document Code: AArticle ID: 1671-7988(2016)04-70-03
引言
悬架是车架与车轮之间一切传力连接装置的总称,一般由弹性元件、减振器和导向机构组成[1]。汽车悬架性能的优劣直接影响着汽车的乘坐舒适性和操纵稳定性,传统的被动悬架系统的刚度和阻尼都是不可调的,只是在很窄的频带内具有良好的减振性能,无法在汽车的行驶过程中随路面激励和汽车运行状态的变化而变化。主动悬架可以根据路面激励的状况,实时调节悬架系统的主动控制力,来抑制整个汽车振动,从而可以大大改善汽车的行驶平顺性。
目前,汽车悬架的主动控制方法多种多样,丁科等采用神经网络对主动悬架进行控制[2],李伟等人把LQR最优控制理论应用到主动悬架控制中[3]。本文对主动悬架进行模糊控制,研究采用模糊控制的主动悬架的舒适性。
1、汽车主动悬架控制系统的模型建立
1.1 1/4汽车主动悬架动力学模型的建立
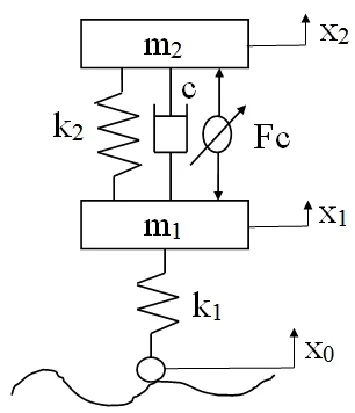
图1 1/4车主动悬架动力学简化模型
1/4汽车主动悬架系统的动力学模型如图1所示,它由悬挂质量m2,悬架弹簧刚度k2,阻尼c2,非悬挂质量m1,轮胎刚度k1、作动器输出力f以及路面输入x0组成。
根据图1所示,由牛顿第二定律可得其运动微分方程为:

写出系统的状态方程为:


1.2 随机路面输入模型的建立
路面不平度是影响汽车悬架动力学特性和汽车整体振动的外部主要原因,所以建立适当的路面输入模型对分析汽车悬架的特性有很重的作用。随机路面时域轮廓生成方法有两种[4],对高斯白噪声经过积分后生成或对其通过滤波器滤波后产生,本文采用后者方法来生成随机里面模型。其时域表达式为:

式中,路面不平度系数G( n0)= 256×10-6m2/ m-1,其为C
q 0级路面的不平度系数;标准空间频率n0= 0.1 m-1;路面空间截止频率f00= 0.01 m-1;车速v=15 m / s;w( t )是均值为零的高斯白噪声。
根据以上数据,则用Matlab/Simulink路面仿真结果如图2所示:

图2 C级路面输入激励
2、汽车主动悬架模糊控策略设定
2.1 模糊控制器结构的选择
模糊控制器的结构直接影响着控制系统的特性[5-6]。本文设计了一个以车身加速度a和车身速度v为模糊控制器的输入,主动力为f为输出的二位模糊控制器。选取的车身加速度a的基本论域为[-10,10]m/s2,车身速度v的基本论域为[-1, 1]m/s,模糊论域为[-3,3],模糊语言均取为{NB,NM,NS, Z,PS,PM,PB},各元素代表负大,负中,负小,零,正小,正中,正大。输出变量F的基本论域为[-900,900]N,模糊论域为[-3,3],模糊语言取为{ NB,NM,NS,Z,PS,PM,PB }。为了方便起见本文输入和输出的隶属度函数都取三角形,去模糊化方法采用重心法。
2.2 主动悬架模糊控制规则的建立
本文模糊控制规则把专家知识以及设计人员的实际经验相结合,制定模糊控制规则如下表1所示:
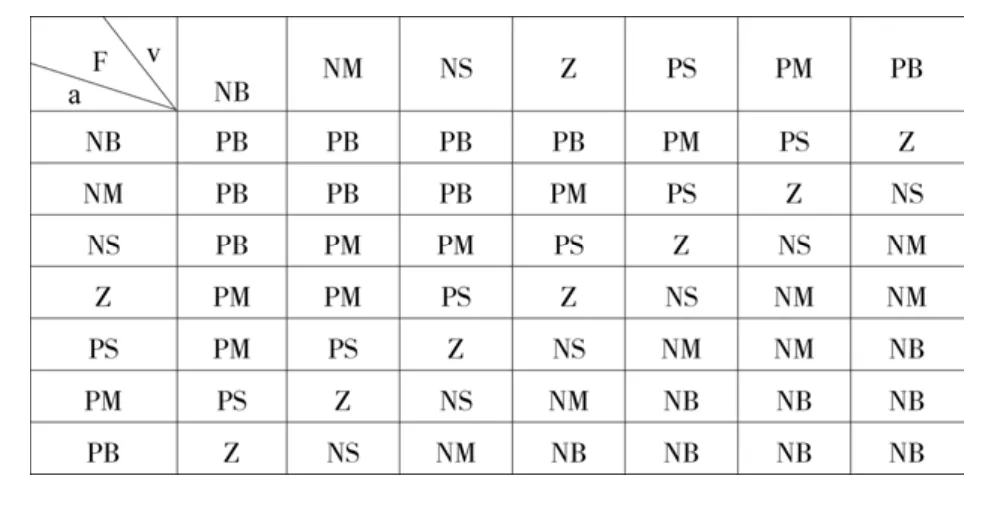
表1 模糊控制规则表
3、仿真分析
3.1 仿真条件以及模型的建立
根据上述建立的1/4汽车主动悬架动力学模型和模糊控制策略,并选定车辆参数m2=318kg,k2=22000N/m, c2=1520N﹒m/s,m1=46kg,k1=192000N·s/m。仿真路面为C级路面,车速为15m/s,在Matlab/Simulink建立仿真模型如图3、4所示,汽车主动悬架模型采用状态空间表达。

图3 汽车主动悬架模糊控制仿真模型

图4 汽车被动悬架模型
仿真时间设定为10s,采用可变步长ode45求解算法进行仿真,仿真得到车身加速度和车身速度图如图5、6所示。

图5 车身加速度时域响应

图6 车身速度时域响应
3.2 仿真结果的分析
为了定性分析汽车主动悬架采用模糊控制的优越性,本文计算了车身加速度和车身速度的均方根如表2所示。由表2可以看出,在相同的外界条件输入下,模糊控制条件下车身加速度的均方根相比于被动控制减少了23.55﹪,车身速度减少了18.1﹪。因此主动悬架采用模糊控制来控制车身的加速度和速度要比被动悬架好。

表2 主动悬架与被动悬架性能均方根值
4、结论
本文探讨了主动悬架采用模糊控制和被动悬架的性能并进行了比较发现:
(1)主动悬架减振效果优于被动悬架,而采用的模糊控制策略为实际的主动悬架设计提供了参考,具有一定的实际意义。
(2)在设计模糊控制器的时候,模糊规则的制定以及比例因子和量化因子的选择都有可能影响模糊控制性能,所以对模糊规则、量化因子和比例因子的优化也是以后研究的重点。
参考文献
[1] 余志生.汽车理论[M].北京:机械工业出版社,2009,3.
[2] 丁科等.车辆主动悬架的神经网络模糊控制[J].汽车工程,2001(5).
[3] 李伟,何渝生.汽车主动悬架一种控制方法的研究[J].重庆交通学院学报,1997(1).
[4] Elbeherily EL M. Advanced Ground Vehicle Suspension System A classified Bibliography [J].VSD.1995.24:231-256.
[5] 柴牧,董恩国,李振兴.汽车主动悬架的模糊PID控制策略[J].机械设计,2003,30(5):1-3.
[6] 冯冬青.模糊智能控制[M].北京:化学工业出版社,2003.
中图分类号:U463.8
文献标识码:A
文章编号:1671-7988(2016)04-70-03
作者简介:张好好,研究生,就读于长安大学汽车学院,车辆工程专业。
Fuzzy control research of vehicle active suspension
Zhang Haohao, Gao Le, Zhang Wei
( University of changan automobile school, Shaanxi Xi 'an 710064 )
Abstract:Firstly, this article analyses the dynamic characteristic of the vehicle active suspension and set up a dynamic model of the quarter of the vehicle active suspension. According to the established model, the fuzzy control was applied to the active suspension, which can control the active force, so that the suspension performance to reach the optimum state; finally, we carry on the simulation to a certain type of vehicle parameters, the simulation results show that: the active suspension has a good performance with the fuzzy control.
Keywords:active suspension; dynamic model; fuzzy control
