应用于汽车防盗抢系统的人脸检测与识别算法探究
2016-07-04金嘉琦孙志强
金嘉琦 孙志强
摘 要:本文设计一款应用于汽车防盗抢系统的人脸识别算法。迅速识别人脸区域,并在该关键区域执行后续程序。在人脸检测部分,应用Viola等人提出的Adaboost级联算法;人脸特征提取部分应用LBP(局部二元模式)结合PCA(主成分分析)降维的算法;在人脸匹配部分应用最近邻分类器来确定是否为已知人脸。
关键词:汽车防盗抢系统;人脸识别;Adaboost;PCA;LBP;最近邻分类器
中图分类号:TP391.4 文献标识码:A 文章编号:1006-8937(2016)02-0044-02
1 汽车防盗抢系统简介
1.1 现代汽车防盗抢系统简述
汽车防盗器是一种在车上安装,延长盗车时间,并增加盗车难度的装置。汽车防盗抢产品分类较多,根据不同的方式防盗产品可分为不同种类。汽车防盗抢设备按能否反馈汽车信息分:单向、双向;根据其防盗具体方式分为:刹车锁止、车门锁止、方向盘锁止、油门锁止、变速杆锁止或车轮锁止。按结构功能分为四大类:机械类、电子式、芯片式和网络式。而根据当前市场形势,汽车防盗抢装置的总体发展方向朝着更高智能网络芯片式发展。
单向电子防盗器是第一代汽车防盗抢产品,至今仍是市场主流产品。通过遥控器,车主可以在有限距离内进行汽车锁止系统的控制,其中包括:车门的开关、震动或强制车门开关警报,为钥匙到系统的单向控制。其优点可总结为:方便安装,成本较低,智能断电;其缺点科总结为:受到高频率信号的扰动会致使汽车防盗抢系统无法正常接收信号,质量不稳定即可靠性差。
随着市场的发展,第二代防盗抢系统产品逐渐形成:可视的双向控制防盗抢控制器。第二代产品即可远程遥控防盗抢系统,也能通过互联网络将车辆实时状态信息反馈给车主,具有更远的遥控距离。在汽车运行过程中若出现驾驶情况预期之外的动作发生,则汽车会将实时运行信息保存并反馈给车主(包括位置信息、车窗开启信息、车子运行状态)。其优点科总结为:超远程监控汽车行驶状态,具备智能断电系统,能根据汽车安全状态控制汽车启停;其缺点可总结为:安装程序繁琐、成本较高,而且正是由于这种繁琐的系统,令其操作变得复杂,错误报错率、错误操作,总体防盗效果差强人意,并且具有很高耗电量。
电子技术的发展和集成电路的出现给防盗器产品带来了新的机遇,第三代芯片式数码防盗器,它是现代汽车防盗器发展的主流方向,芯片式数码防盗器的原理是发动机的锁止、切断电路与油路,车辆只有在获取遥控钥匙信息时才可启动,而且需要钥匙中的密码新品与防盗抢系统的密码芯片成功对接才可启动。目前市场上多数汽车均采用此种防盗方式作为原配防盗器。
芯片式防盗系统与前几代汽车防盗抢系统相比发展更,最近研發的高端电子防盗抢芯片能够进行自我诊断,根据车主授权备用钥匙的数量,授权者能够读取防盗抢系统的工作日志。而且利用其专有的射频识别技术(RFID),车辆防盗抢系统能够准确有效的识别车主,车主走近或离开车辆时,系统可自动识别其身份并自动开启、锁止汽车。其优点可总结为:密码破译难度高,密码重复率低。而缺点有:损坏或丢失密码钥匙维护不方便,只能反厂,因为该防盗装置由汽车原厂生产。
随着网络技术的发展,产生了以网络技术为核心的第四代汽车防盗抢装置。这一代汽车防盗抢装置以 GPS卫星定位的汽车防盗抢系统为代表,主要依靠汽车点火系统的锁止,达到汽车防盗抢的目的。同时,这一代防盗抢系统能够通过 GPS 卫星定位到防盗抢系统,并将被盗抢的汽车实时状态信息、车辆准确的位置及警报信息后台发送到系统报警中心,这一代防盗抢装置属于网络式电子防盗器。这种防盗系统地优点是:实时性强,功能全,可以远程监控。缺点是:运行费用高,每月都要服务费用,另外系统存在信号死角,易受到破坏,价格昂贵,安装复杂。国外第四代防盗抢装置已安装蓝牙装置,这种非接触式技术是其新的优势,而国内并未普遍采用此技术。随着人工智能技术的发展,汽车防盗抢技术也朝着更加智能化的方向发展,目前市场上的汽车智能终端产品,将汽车防盗、报警、导航、显示、多媒体、远程控制等技术全部集成在一个终端模块上,即本文要讨论的汽车防盗抢系统。
基于人脸识别技术的防盗抢系统将实现一种新的具有人性化、智能化的汽车防盗抢功能。驾驶员进入汽车后,ccd镜头采集驾驶员头像进行人脸识别,若非指定驾驶员则汽车无法发动。即使是在车钥匙及遥控器被复制或丢失的情况下,其他人也无法开走车辆。
2 算法的模块化分类
根据系统功能,算法可分为系统启停模块,人脸识别模块。
2.1 系统启停模块
启动模块,驾驶员用钥匙或按钮接通电源,CCD镜头启动,进行一次头像采集。停止模块,若是已知人脸,系统待命,若是未知人脸,则系统切断发动机点火电路。
2.2 人脸识别模块
本系统将人脸识别模块分为四部分:图像预处理模块、人脸检测模块、人脸特征提取模块、人脸匹配模块。
2.2.1 图像预处理模块
使用黑白CCD镜头来简化灰度处理这一步骤。
2.2.2 人脸检测模块
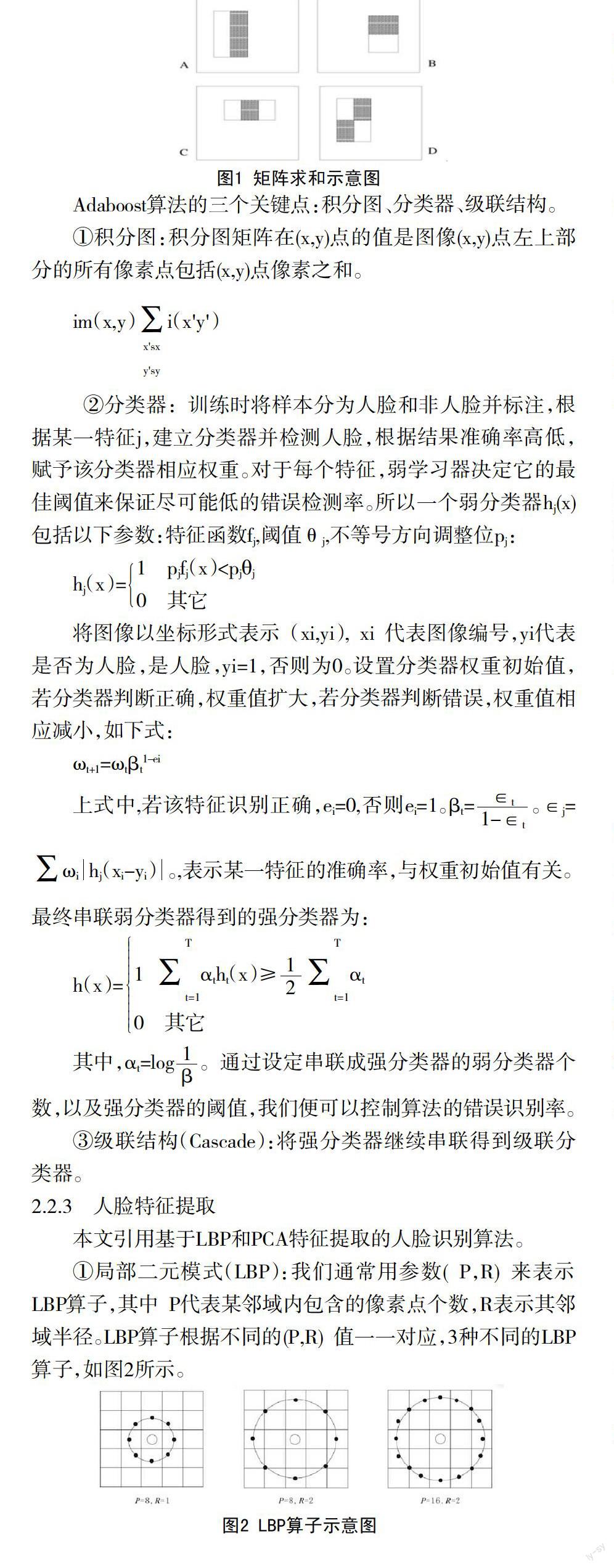
矩阵求和示意图如图1所示。特征矩形根据实际人脸部位颜色深浅表示为深色和浅色。A,B所示为两矩形特征。C、D所示为三、四矩形特征。两矩形特征的值是黑色区域矩形内像素总和减去白色区域矩形的像素总和。依次类推。
Adaboost算法的三个关键点:积分图、分类器、级联结构。
②主成分分析法:假设训练图像有N幅,图像大小为m×n,图像维数为M=m×n,将第i幅训练图像转化为一维的列向量xi,并求训练样本的协方差矩阵S,大小为M×M。PCA提取的主元方向即为协方差矩阵S的特征向量。
2.2.4 人脸匹配
在匹配阶段,对现场采集的人脸头像按照以上步骤进行特征提取,得到M个特征值,?姿1≥?姿2≥...≥?姿m,并按照该顺序构成向量。求出该特征向量与样本特征向量间欧氏距离并与实验得出最大阈值对比,若小于等于该值,则是;若大于该值,则否。
3 结 语
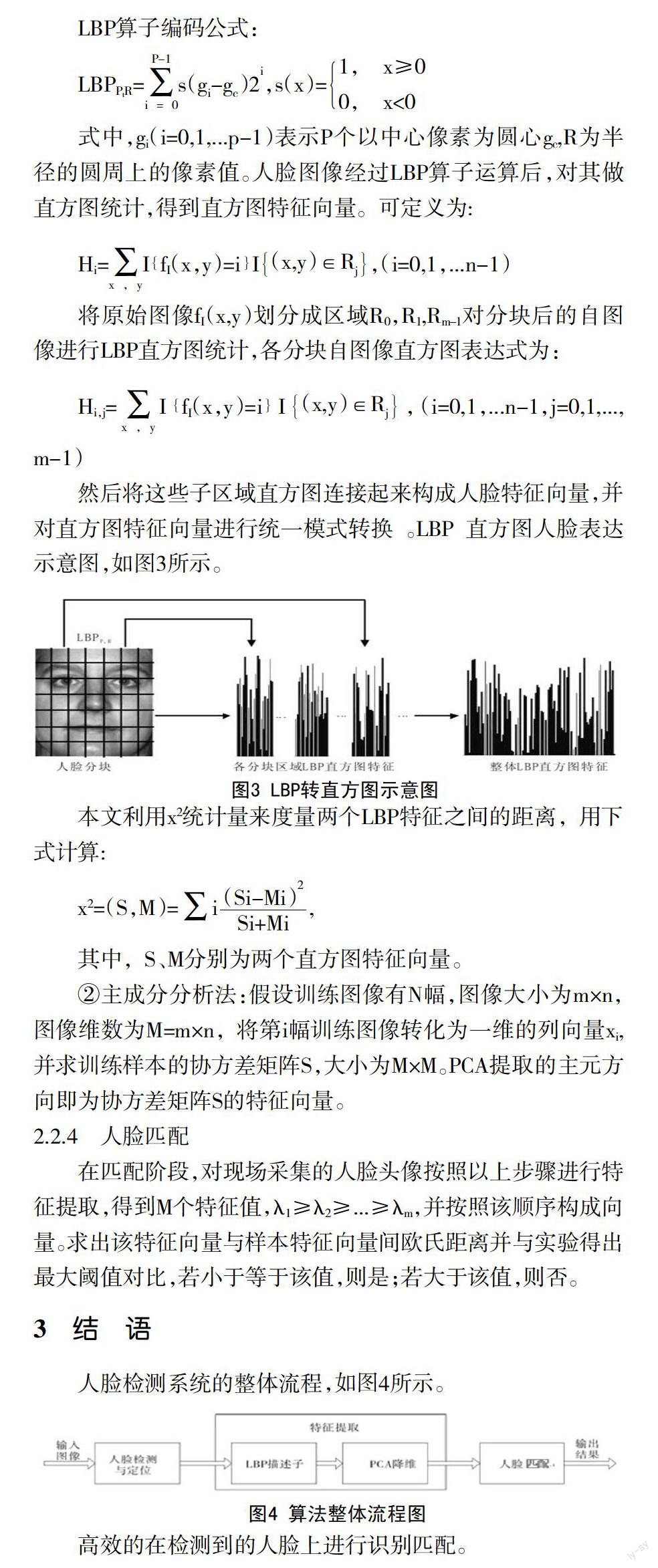
人脸检测系统的整体流程,如图4所示。
高效的在检测到的人脸上进行识别匹配。
参考文献:
[1] 熊承义,李丹婷.基于LBP和PCA特征提取的人脸识别[J].中南民族大 学学报,2011,(2).
