基于两段卡尔曼滤波的感应电机无位置传感器控制*
2016-07-04张金良康龙云陈凌宇姚远
张金良 康龙云 陈凌宇 姚远
(1.华南理工大学 电力学院, 广东 广州 510640; 2.广东省绿色能源技术重点实验室, 广东 广州 510640)
基于两段卡尔曼滤波的感应电机无位置传感器控制*
张金良1,2康龙云1,2陈凌宇1姚远1
(1.华南理工大学 电力学院, 广东 广州 510640; 2.广东省绿色能源技术重点实验室, 广东 广州 510640)
摘要:传统的扩展卡尔曼滤波算法已经被广泛地应用在感应电机无位置传感器控制系统中,但其存在运算量大的问题,尤其是应用于感应电机这种多阶、强耦合的系统时.为了解决这一问题,文中引入一种与原算法数学模型上等效的两段式扩展卡尔曼滤波算法到感应电机无位置传感器控制中.在两相静止坐标系下,取定子电流和转子磁链为全阶状态量,以转子电角度及角速度为状态增广量,以此设计两段式扩展卡尔曼滤波算法.实验结果表明,相比传统卡尔曼滤波算法,该算法在保持与原算法相同参数辨识性能的情况下,能够有效地减少运算时间.
关键词:感应电机;无位置传感器控制;两段式扩展卡尔曼滤波
感应电机是一个高阶、多变量、强耦合、非线性的系统,为了获取与直流电机相同的控制性能,必须对其进行解耦和简化.矢量控制的思想就是通过坐标变换,将感应电机的定子电流分解为励磁分量与转矩分量,以实现励磁磁场与扭矩解耦控制,从而实现与直流电机相媲美的调速性能[1- 3].为了实现感应电机的矢量控制,需要检测转子磁链的位置角,目前传统的方法是使用位置传感器所测量的转子角度结合电机电流模型计算的转差角之和来获取[1],这不仅增加了硬件复杂度及维护成本,同时在恶劣环境下降低了系统运行的可靠性.为了克服这些问题,无位置传感器控制技术受到了越来越广泛的关注.
模型参考自适应法、滑模变结构观测器法、自适应全阶观测器法等是目前常见的无位置传感器技术.传统的模型参考自适应技术是以电机的电压模型为参考模型,电流模型为可调模型,根据两者估计的转子磁链差值,选择适合的控制率估算电机的转速[4],但是由于定子电阻的可变性以及电压模型的纯积分问题,该方法的使用受到限制,需要相关策略才能解决这些问题.使用滑模变结构观测器法估算电机参数[5- 7]比较容易实现,但是外界干扰的鲁棒性及参数摄动对该方法辨识性能的影响较大.自适应全阶观测器以感应电机作为参考模型,以设计的全阶观测器作为可调模型,通过调整所设计的反馈矩阵来配置观测器的零极点[8].这种方法不存在观测器纯积分问题,但存在低速运行不稳定的情况.传统扩展卡尔曼滤波算法[9- 11]是一种对非线性系统的随机观测器,其优点就是当系统存在系统噪声及测量噪声时,仍能对系统进行准确估计.但是该方法对电机本身的参数及模型精度的依赖较大,其中的随机参数的确定需要在实验中反复验证,才能确保系统的最佳工作状态.另外更大的问题是,被控对象模型阶数的增加将大大增加算法的运算量,尤其像感应电机这种多阶模型.这就需要较高的硬件配置才能实现这一功能.为了解决这一问题,Hsieh等[12]提出一种最优两段式卡尔曼滤波器(OTSKF)算法,OTSKF是线性卡尔曼滤波器算法(KF)数学上的一种等效实现,其主要原理是将高阶的线性卡尔曼滤波器分解成并行运行的全阶卡尔曼滤波器和增广卡尔曼滤波器,系统中需辨识的参数由增广卡尔曼滤波器来实现,这样在辨识性能不变的情况下,减少算法的运算量.但这种辨识方法只适合于线性系统,并不适合感应电机控制系统.因此,Akrad等[13]将一种两段式扩展卡尔曼滤波算(TEKF)法引入到了永磁同步电机的无速度传感器控制中,这是一种对OTSKF算法在非线性系统中的扩展应用.实验结果达到了预期的目标.
文中将基于TEKF设计的无位置传感器控制算法应用到感应电机的无位置传感器控制中,该算法将一个6阶的扩展卡尔曼滤波器分解成一个4阶的全阶卡尔曼滤波器和一个二阶的增广卡尔曼滤波器并行运行,理论分析及实验结果表明该算法相比传统的扩展卡尔曼滤波算法,能有效减少运算量,同时保持相同的辨识性能.
1感应电机数学模型
1.1连续数学模型
忽略空间谐波、磁路饱和、铁心损耗以及频率变化和温度变化对绕组电阻的影响,感应电机在两相静止坐标系下的数学状态方程可表示如下[12]:
(1)
式中,X(t)=[IsαIsβψrαψrβ]T,r(t)=[θωr]T,
u(t)=[usαusβ]T,Y(t)=[isaisβ]T,

其中,usα、usβ、isα、isβ、Ψrα、Ψrβ是两相静止坐标系(αβ)下的定子电压、定子电流及转子磁链,Rr为转子电阻,Rs为定子电阻,Ls为定子电感,Lr为转子电感,Lσ为定子漏感,Lm为定转子互感,θr为感应电机转子的电角度值,ωr为感应电机转子的电角速度值.
1.2离散数学模型
假设电机控制的采样周期为T,将式(1)离散化之后,得到的离散时间状态空间表达式为
(2)
式中,
(3)
将方程(3)泰勒级数展开,考虑到采样时间T很短,忽略二次以上的高阶项,得到
(4)
2两段式扩展卡尔曼滤波器设计
2.1传统扩展卡尔曼滤波算法
(5)

基于以上增广状态方程的扩展卡尔曼滤波算法可以分为“预测”和“修正”两个阶段[8],其具体的递推公式可以表达如下:
(6)

2.2两段式扩展卡尔曼滤波算法
传统扩展卡尔曼滤波算法之所以运算量大,在于存在误差协方差矩阵中的Pxr[·]及Pxr[·]T项,为了消除这两项,使用两段式卡尔曼滤波技术[11],通过以下U-V矩阵转换,将传统的扩展卡尔曼滤波器分解成全阶卡尔曼滤波器及增广卡尔曼滤波器:
(7)
(8)
将式(8)代入到传统扩展卡尔曼滤波方程(6)中,并对每一方程展开[13],就可以得到两段式扩展卡尔曼滤波算法.所分解出的全阶卡尔曼滤波算法方程组表示为
(9)
所分解出的增广卡尔曼滤波算法方程组可表示为
(10)
方程(9)、(10)中的耦合项可表示为
(11)
相应的原估计值可以根据方程式(7)获得:
(12)
感应电机所观测的转子磁链角度可由下式表示:

(13)

(14)
通过以上一系列的步骤,就可以将原有的6阶卡尔曼滤波器降为1组4阶全阶滤波器及1组2阶增广滤波器.
3算法运算量比较分析
表1、2为传统扩展卡尔曼滤波算法及两段式扩展卡尔曼滤波算法运算量的统计对比,其中n为全阶状态量Xk的维数,p为增广状态量rk的维数,m为输出信号状态量Yk的维数,n为输入信号状态量uk的维数.每一表框表示相应系数矩阵计算加法或乘法运算量.从表中可以看出,两段式扩展卡尔曼滤波算法的加法与乘法运算量和是1 314次,相比传统扩展卡尔曼滤波算法的1 778次减少了26%的运算量.
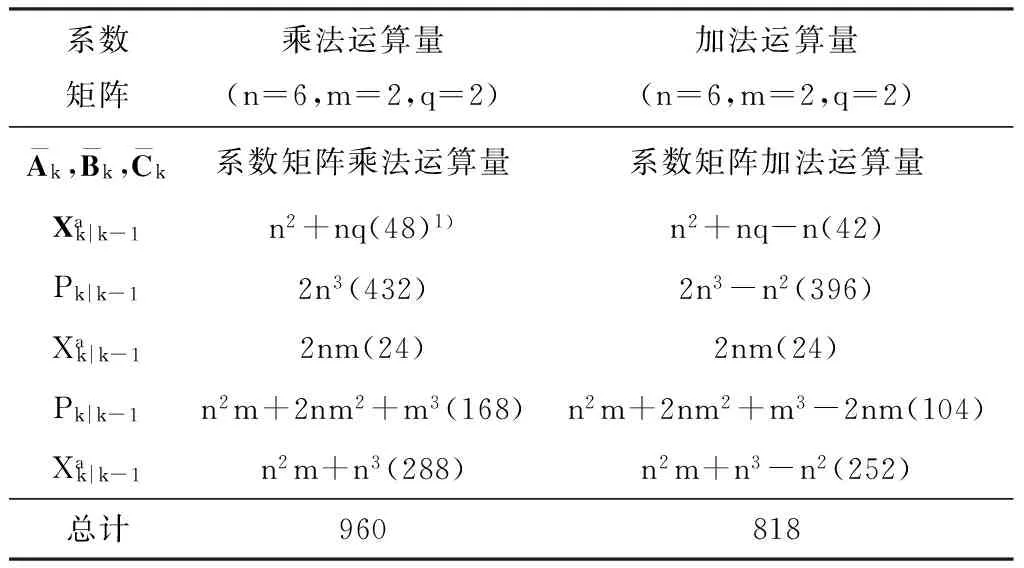
表1 传统扩展卡尔曼滤波器算术运算需求量
1)括号内为运算次数.

表2 两段式扩展卡尔曼滤波器算术运算需求量
1)括号内为运算均数.
通过理论分析可以看出,两段式扩展卡尔曼滤波算法能有效减少算法运算量,在实际的实验中,可以在运算算法的起点至终点设计一个IO口的反转数字信号,使用示波器测取该信号的持续时间,即为该算法的运算时间,从而对算法运算量的节省情况有一个较为直观的认识.
4实验研究
基于两段式扩展卡尔曼滤波器设计的感应电机无位置传感器矢量控制系统框图如图1所示.
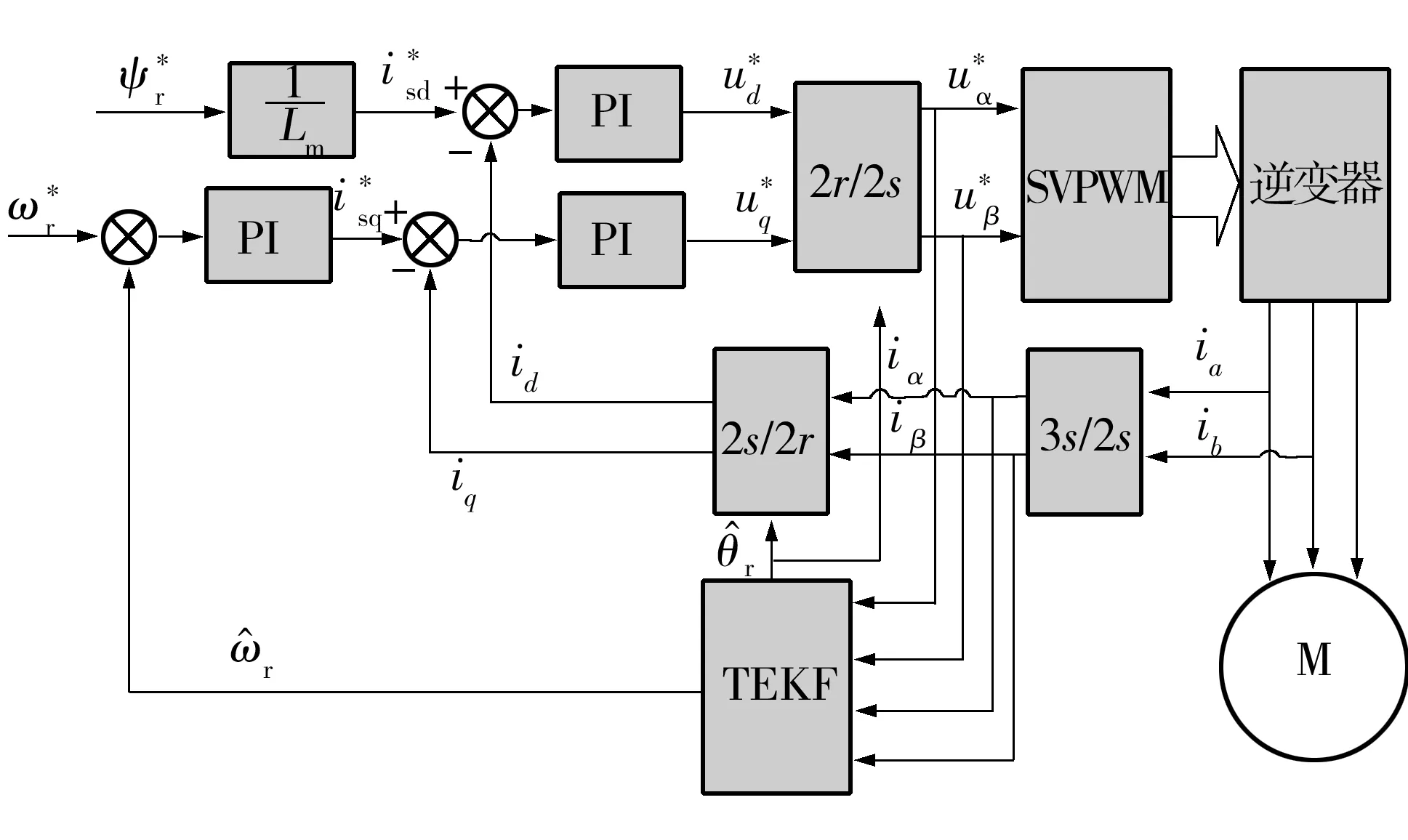
图1 基于两段式扩展卡尔曼滤波的电机矢量控制系统框图
Fig.1BlockdiagramofpositionsensorlessvectorcontrolbasedonTEKF
实验系统的硬件设备由一套Myway公司生产的Expert3控制系统以及一套额定功率为2.2kW的感应电机组成.其中,Expert3的核心控制芯片为最大时钟频率为225MHz的浮点运算芯片TMS320C6713,感应电机的具体参数为:额定扭矩10N·m,额定电压380V,定子电阻3.6Ω,转子电阻2.5Ω,定子电感0.301H,转子电感0.302H,互感0.273H,极对数为2.控制系统的采样周期为100μs.所配置的PWM为10kHz,并带有2μs死区时间的驱动信号.电流的采集通过电流霍尔传感器获取.实验中系统噪声,测量噪声及系统误差协方差矩阵的初始值选定为
(15)
为了验证传统EKF和TEKF的算法等效性,将TEKF观测到的转子磁链角度及转子速度用于闭环控制中,EKF的观测值只是用作比较用,处于开环状态.实验中给定负载扭矩3N·m,给定转速为一个从600r/min到1 000r/min的阶跃信号.图2为对应的实验辨识结果图.图2(a)为对应感应电机转速调节过程中的转速观测图.从图中可以看到两套算法所辨识的转速都能很好地跟踪实际值,在电机转速动态调节过程中,误差会加大,但当转速达到稳定后,其辨识值都能迅速地收敛到实际值.图2(b)为转子磁链两相静止坐标系下分量的观测值,在电机转速调节过程中,其峰值有少量的变化,这是由于定子电流的励磁分量在PI调节过程中产生的超调量所导致的.图2(d)、2(e)为定子电流的观测图,励磁电流与转矩电流环调节所产生的超调导致了电流有一个大幅范围的增加.图2(c)、2(f)为TEKF与传统EKF在转子磁链与定子电流观测值上的误差,从图中可以看到,两者之间的差值很小.这个误差可以认为是TEKF的迭代步数要大于传统的EKF所造成的精度损失.






图2 调速实验结果图
实验最后,通过数字IO口信号持续的时间测量获取两套算法的运行时间,其中传统扩展卡尔曼滤波器算法的运行时间为67.4μs,两段式扩展卡尔曼滤波算法的运行时间为48.6μs,比传统卡尔曼算法时间节省了27.89%,这比理论计算节省的运算量更多,达到了预期目的.
5结语
文中在感应电机两相静止坐标系下的数学模型基础上,利用两段式扩展卡尔曼滤波算法,提出一种新的感应电机无位置传感器控制算法,实验结果表明,该算法对转子磁链和转速的辨识具备较高精度及鲁棒性.实验结果表明两段式扩展卡尔曼滤波算法能够在保持与传统EKF相同辨识效果的情况下,有效地减少算法运算时间.但需要注意的是,在电机带载运行中,转子电阻会随着电机温度的变化而变化,这会导致辨识精度上的误差.将对辨识效果影响较大的转子电阻加入到滤波算法中,使其成为一个状态观测量,进一步提高算法的辨识精度,这是今后研究的重点.
参考文献:
[1]徐奇伟,宋立伟,崔淑梅.感应电机矢量控制中转子参数自适应辨识 [J].电工技术学报,2011,26(6):81- 87.
XUQi-wei,SONGLi-wei,CUIShu-mei.Inductionmotorvectorcontrolbasedonadaptiveidentificationofrotorparameters[J].TransactionsofChinaElectrotechnicalSocie-ty,2011,26(6):81- 87.
[2]阮毅,陈伯时.电力拖动自动控制系统-运动控制系统 [M].4版.北京:机械工业出版社,2014.
[3]魏业文,康龙云,黄志臻,等.基于SVC-MERS的风电异步发电机组电压控制 [J].华南理工大学学报(自然科学版),2015,43(4):95- 103.
WEIYe-wen,KANGLong-yun,HUANGZhi-zhen,etal.FeasibilitystudyonenergyharvestingaroundACtransmissionlinebasedonelectricpotential[J].JournalofSouthChinaUniversityofTechnology(NaturalScienceEdition),2015,43(4):95- 103.
[4]SAFFETAltayAli,EMINTacerMehmet,FAIKMergenAhmet.Sensorlessspeedcontrolofavectorcontrolledthree-phaseinductionmotordrivebyusingMRAS[J].JournalofVibroengineering,2014,16(3):1258- 1267.
[5]FENGY,ZHENGJ,YUX,etal.Hybridterminalslidingmodeobserverdesignmethodforapermanent-magnetsynchronousmotorcontrolsystem[J].IEEETransactionsonIndustrialElectronics,2009,56(9):3424- 3431.
[6]苏健勇,李铁才,杨贵杰.基于四阶混合滑模观测器的永磁同步电机无位置传感器控制 [J].中国电机工程学报,2009,29(24):98- 103.
SUJian-yong,LITie-cai,YANGGui-jie.PMSMsensorlesscontrolbasedonfour-orderhybridslidingmodeobserver[J].ProceedingsoftheCSEE,2009,29(24):98- 103.
[7]OSCARBarambones,PATXIAlkorta.Arobustvectorcontrolforinductionmotordriveswithanadaptivesliding-modecontrollaw[J].JournaloftheFranklinInstitute,2011,348(2):300- 314.
[8]KORLINCHAKC,COMANESCUM.Sensorlessfieldorientationofaninductionmotordriveusingatime-varyingobserver[J].IETElectricPowerApplications,2012,6(6):353- 361.
[9]ZHANGWei,LUOJian-jun.Speedandrotorfluxestimationofinductionmotorsbasedonextendedkalmanfilter[C]∥ProceedingsofSixthInternationalConferenceonNetworkedComputingandAdvancedInformationManagement(NCM).Korea:[s.n.],2010:157- 160.
[10]SERHOUDH,BENATTOUSD.Sensorlessoptimalpowercontrolofbrushlessdoubly-fedmachineinwindpowergeneratorbasedonextendedkalmanfilter[J].InternationalJournalofSystemsAssuranceEngineeringandManagement,2013,4(1):57- 66.
[11]FRANCESCOAlonge,FILIPPO,ANTONINOD’IppolitoSferlazza.Sensorlesscontrolofinduction-motordrivebasedonrobustkalmanfilterandadaptivespeedestimation[J].IEEETransactionsonIndustrialElectronics,2014,61(3):1444- 1453.
[12]HSIEHCS,CHENFC.Optimalsolutionofthetwo-stageKalmanestimator[J].IEEETransactionsonAutomaticControl,1999,44(1):194- 199.
[13]AKRADA,HILAIRETM,DIALLOD.AsensorlessPMSMdriveusingatwostageextendedKalmanestimator[C]∥ProceedingsofIECON2008,34thAnnualConferenceofIEEE.UnitedStates:[s.n.],2008,10(13):2776- 2781.
Position Sensorless Control of Induction Machines Based on Two-Stage Kalman Filtering
ZHANGJin-liang1,2KANGLong-yun1,2CHENLing-yu1YAOYuan1
(1.School of Electric Power, South China University of Technology, Guangzhou 510640, Guangdong, China;2.Key Laboratory of Clean Energy Technology of Guangdong Province, Guangzhou 510640, Guangdong, China)
Abstract:The conventional extended Kalman filtering(EKF) algorithm has been widely applied to the position sensorless control of induction machines (IM).However, heavy computational burden may accompany with EKF, especiallyfor the IM with a high-order and strong-coupling mathematical model. In order to solve this problem, a novel control algorithm using the two-stage extended Kalman filtering (TEKF), which is mathematically equivalent to the conventional EKF algorithm, is proposed. In this algorithm, the stator current and the rotor flux linkage in the stationary reference frame are taken as the full-order state variables, and the rotor electrical angle and angular speed are used as the augmented system state variables. Experimental results show that the proposed algorithm can effectively save the operation time without degrading the parameter identification performance of the conventional EKF algorithm.
Key words:induction machine; position sensorless control; two-stage extended Kalman filtering
收稿日期:2015- 06- 08
*基金项目:国家自然科学基金资助项目(51377058,61104181)
Foundation items: Supported by the National Natural Science Foundation of China(51377058,61104181)
作者简介:张金良(1985-),男,博士生,主要从事感应电机无传感器技术研究.E-mail:zjl.cyz@163.com
文章编号:1000- 565X(2016)04- 0028- 06
中图分类号:TM 351
doi:10.3969/j.issn.1000-565X.2016.04.005
