1 m新真空太阳望远镜成像系统观测数据干涉条纹特性分析及消除方法∗
2016-07-03王思博向永源金振宇
王思博 徐 稚 向永源 金振宇
(1中国科学院云南天文台 昆明 650216) (2中国科学院大学 北京 100049)
1 m新真空太阳望远镜成像系统观测数据干涉条纹特性分析及消除方法∗
王思博1,2†徐 稚1‡向永源1金振宇1
(1中国科学院云南天文台 昆明 650216) (2中国科学院大学 北京 100049)
抚仙湖1 m新真空太阳望远镜(New Vacuum Solar Telescope,简称NVST)是我国新一代地基太阳观测设备之一,其中Hα成像系统是进行太阳色球观测的主要终端.实测Hα观测数据(特别是偏带观测数据)中明显存在由薄膜干涉引起的等厚条纹,而常规平场校正有时无法将其消除,并在后期图像高分辨率重建过程中造成严重影响.为了解决这个问题,利用连续4 h的Hα偏带观测数据对干涉条纹的空间和时间分布特性做了分析并发现:干涉条纹的间距或二维空间分布样式随时间固定不变,但条纹的强度随时间变化明显(4 h左右可见度增加9倍),是导致常规平场校正无法将其消除的主要原因.由此推断造成上述时变特性的主要原因是观测过程中入射光的强度以及入射光与CCD靶面位置的相对角度随时间发生了变化,而且产生条纹的薄膜结构与靶面位置距离较近.尝试了两种降低条纹可见度的方法.首先对探测器(pco.4000型CCD)光敏介质的前封窗进行了改造,通过改造前封窗楔角至2°的方案来调制条纹间距至CCD像元尺度,改造之后小范围视场内可识别出可见度仅为0.6%的少量干涉条纹.其次基于图像滤波技术提取干涉条纹图样并生成所谓条纹平场,分别采用和比较了频域傅里叶变换滤波和空域中值滤波两种方法,结果基本相同.观测数据再次进行条纹平场校正之后,条纹消除效果明显:可见度可降低8倍左右(即由之前的4.7%降低为0.6%以下).同时也指出多幅图像的积分(累加)可以有效降低精细太阳结构在条纹平场提取中的影响,并给出累加时间的经验值约为20 m in.
仪器:探测器,方法:数据分析,方法:观测,技术:图像处理
1 引言
电荷耦合元件(Charge-Coupled Device,简称CCD)是70年代初发展起来的一种新型固体探测器,因其具有灵敏度高、线性好、信噪比高和量子效率高等优点,在天文观测中得到了广泛的应用[1−2].然而在使用CCD(特别是薄型CCD)采集的图像中经常会存在干涉条纹,尤其在长波波段.在光谱观测中干涉条纹的存在会影响光谱的轮廓及定标计算;在成像观测中它会干扰观测目标的形态特征.特别值得一提的是,它还会对图像的高分辨重建算法造成影响.因此干涉条纹的消除是数据处理过程中需要考虑的一个重要问题.
普遍认为,实测数据中的干涉条纹是由薄膜干涉而形成的等厚条纹.首先CCD的光敏介质是一种“硅-硅-氧化硅”的三明治薄膜结构器件,其次为了保护CCD光敏介质有时还会在硅层前胶合玻璃封窗[3−4].
当光束入射到薄膜后,会在薄膜的上、下两个表面处发生反射和透射,相邻两束透射光由于经过了不同的路径而产生了一定的光程差2nh cos i,对应的相位差为:

式中λ为入射光波长,n为薄膜的折射率(这里薄膜或为CCD本身结构,或为光路中诸如前封窗玻璃等薄膜器件),h为薄膜厚度,i为薄膜中的折射角.由于这两束光来自同一入射光束,具有相同的频率和振动方向,可形成相干光.两者的光程差与波长倍数的关系则决定了它们相干后合振幅的强弱.当薄膜和其周围介质间的反射率较大时,光束会在膜内多次反射.在平行平板多光束干涉情况下,相干条纹的强度可表示为:

式中A0为入射光的振幅,R为光在薄膜与介质交界面的反射率.
通常光束小角度入射CCD的情形可以视为正入射情形[5],对于较为常见的楔形薄膜,此时两条相邻的亮条纹(或暗条纹)的间距为:

式中α为薄膜的楔角.
在实际情况下,CCD膜层或封窗受到温度、应力等因素的影响会发生形变,二维空间各个位置的厚度并不是一致的,因此我们经常会观测到比牛顿环或楔形薄膜情况下更为复杂的等厚条纹[6−7],诸如下文实测数据中所展示的双曲或者椭圆样式条纹.
从另一个角度来说,干涉条纹的产生机制及其强度的时空分布特点成为了实测天文数据处理过程中抑制或消除干涉条纹的重要依据.目前消除观测数据干涉条纹的方法主要可分为以下3种:
(1)简便消除法:简便消除法是通过调整CCD的安装角度、改变光路中滤光片的数目等实践经验来抑制干涉条纹.在反射率一定的情况下,干涉光强度只与光束的入射角度有关.当入射角增大时,透射光的干涉强度会减弱,达到一定程度后图像中便观察不到明显的干涉条纹[8].例如在实测太阳光谱观测中,Kubiˇcela等[9]通过改变SBIG ST-6型号CCD在光谱仪中的安装角度来消除数据中的干涉条纹.在某些薄膜试验中[8,10],人们也尝试旋转薄膜样品(即增加合适的入射角度)来消除样品光谱图中的干涉条纹.此外,改变光路中滤光片数目、厚度、间隙及与CCD靶面的距离等也有助于干涉条纹的去除[2,11].但通常这些方法都只能适当抑制或消除部分频率或样式的干涉条纹.
(2)硬件消除法:常见的方法包括改造CCD硅层前的封窗玻璃、镀抗反射膜或适当增加硅层的厚度(详见PI公司的产品说明网页1h ttp://www.p rinceton instrum en ts.com/cm s/index.php/lib rary/51-ccd-p rim er/149-sp ectroscop ic -eta loning-in-back-illum inated-ccds)等等.在下面的章节中我们将展示封窗玻璃改造对条纹影响的实测结果.
(3)算法消除法:简单的平场校正有时不能消除观测数据中的干涉条纹,因此需要通过一定的算法进行条纹形态重建[5]、仿真[12]或者滤波[13−14]来提取数据中的干涉条纹图样,然后再将其从原始数据中扣除.扣除的方式主要是减法[11,13,15−16]和除法[5,17]两种.
抚仙湖1m新真空太阳望远镜(New Vacuum Solar Telescope,简称NVST)是我国重要的新一代地基太阳观测设备之一,配有成像以及光谱观测终端[18],自运行以来,已积累了大量的观测资料,为太阳物理领域的科研人员开展相关的研究工作提供了基础数据.例如屈会雪等[19]采用NVST在TiO(705.8 nm)波段的观测数据研究了黑子周围光球亮点的特性变化;Yang等[20]和Yan等[21]基于NVST在Hα(656.3 nm)波段的观测数据分别在小尺度磁环之间的磁重联现象与宁静暗条的精细结构和物质流方面开展了相关的研究.
NVST目前在Hα(656.3 nm)波段的成像以及光谱观测中均使用德国PCO公司生产的薄型前照式pco.4000型CCD作为探测器.Wang等[22]在其工作中讨论了光谱数据中干涉条纹的处理方法,而本文则主要围绕成像观测数据中干涉条纹的相关问题展开.本文首先研究和分析了条纹的空间分布以及时间演化特点,然后根据条纹的时空变化特性尝试采用“硬件消除——pco.4000型CCD前封窗改造”和“算法消除——残留干涉条纹提取”两种方法来抑制或消除Hα单色图像上的干涉条纹,最后讨论并总结方法的误差和局限性.
2 干涉条纹空间和时间变化特性
为了较为清晰地展示条纹结构,该工作主要利用太阳准宁静区Hα偏带观测数据进行条纹分析.
2.1 干涉条纹的空间分布特性
图1(a)为2015年3月5日拍摄的1帧干涉条纹较为明显的观测图像,观测波段为Hα红翼0.1 nm.在该波段上太阳日面结构比较稀少,仅仅能看到大尺度的暗条结构.干涉条纹明显呈双曲型分布,其亮度变化严重影响暗条内部的精细结构形态.我们抽取某一空间位置的图像强度信息(如图中竖线所示),并确保此处没有明显的太阳结构(即强度的空间变化主要归因于干涉条纹的分布),然后对其进行一维小波分析.小波能谱图(图1(b))显示在空间位置450–850 pixel之间,明显存在一个周期渐变的频率信号(等高图示意振幅大于10%),很好地反映了图1(a)中局部分布的、间距渐变的干涉条纹.
2.2 干涉条纹的时间变化特性
这里主要考虑干涉条纹的空间位置和样式以及强度随时间的变化特性.
根据NVST常规观测流程,通常在早上开启科学观测之前和下午结束科学观测之后各采集一组平场,从而保证平场和科学数据之间的时间间隔在3 h之内.然而实际工作显示这样的时间间隔有时无法消除干涉条纹.
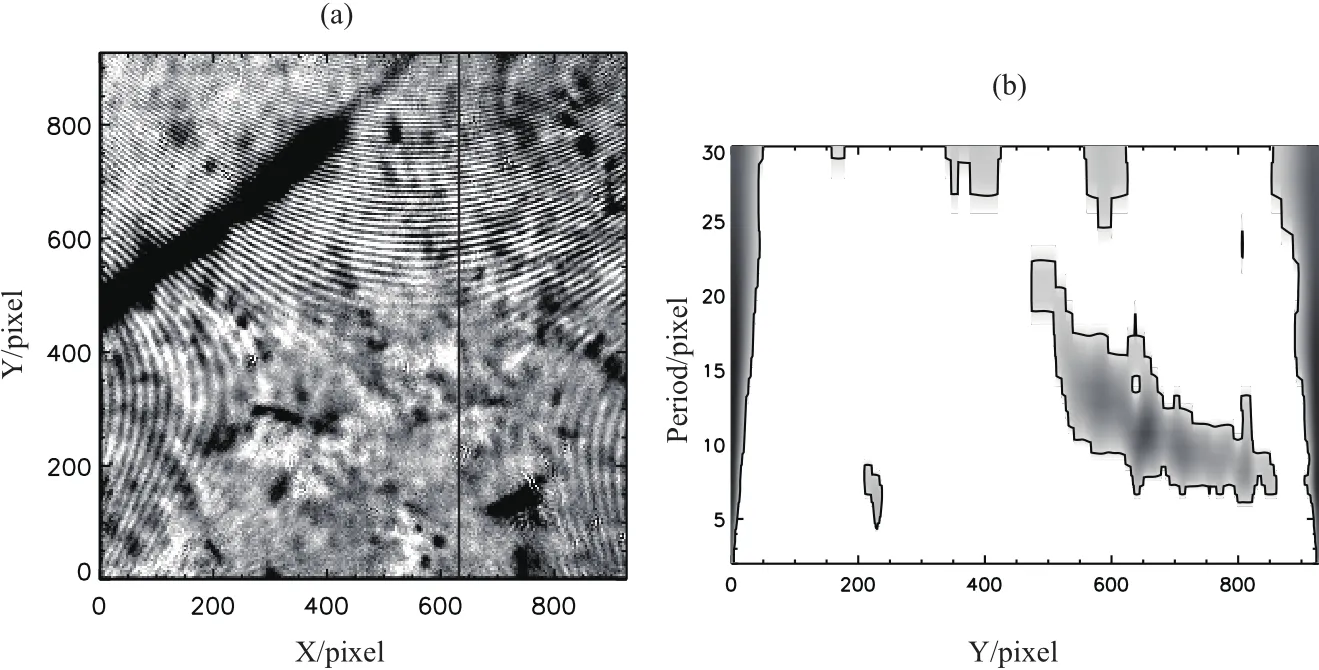
图1 (a)带有明显干涉条纹的观测图像,观测波段Hα+0.1 nm;(b)图1(a)中竖线位置强度变化的小波分析能谱图.横轴为空间位置.Fig.1(a)The observational data w ith strong in terference fringes,and the w avelength is Hα+0.1 nm;(b) A w avelet p ow er sp ectrum o f the in tensity variation along the vertica l line in panel 1(a).The horizonta l axis corresponds to spacial position.
仍以2015年3月5日偏带观测数据为例,我们分析了126帧连续的时间间隔为2m in的数据.每1帧中提取出一个宽度为10像素、高度为401像素的局部区域(该局部区域的选取尽量避开明显的太阳结构),然后将126帧图像按时间顺序合成,结果如图2所示.这里需要强调的是,126帧图像的强度已经进行了灰度统一,即假设太阳宁静区的平均强度随时间保持不变.

图2观测数据局部区域的时间合成图.横轴为采集时间,是由126帧局部区域按时间顺序拼接而成.纵轴为空间位置,与图1(a)中的Y轴对应.Fig.2 T im e slice o f a sub-region taken from the observationa l data.X-ax is is tim e,consisting o f 126 sub-region data,and Y-axis is spacial position,correspond ing to the vertical coord inate in Fig.1(a).
图2 中那些分布没有规律的亮暗结构来自于太阳结构本身的演化,而水平分布的明暗相间的横条纹则是干涉条纹.我们在图2中随机选取一条亮条纹(如图中横线所示),并采用质心法来确定条纹的位置.图3(a)显示了位置随时间的变化及线性拟合结果.从中发现,在这段时间内(约4 h)条纹位置的移动量小于一个像素,因此我们认为条纹随时间是基本不动的,样式也是稳定的.
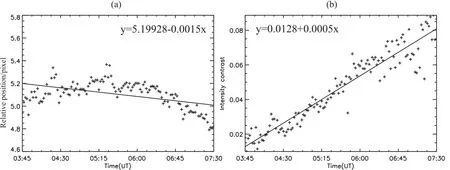
图3 干涉条纹空间位置(a)和可见度(b)随时间的变化及其拟合结果.条纹位置判断方法以及可见度定义参见文中.实线为线性拟合结果.Fig.3 Tem pora l variation o f the fringe p osition(a)and the in tensity con trast(b),and their fitting resu lts.The fringe position decision and defin ition of intensity contrast can be seen in the tex t.The solid lines ind icate the linear fitting resu lts.
相对于稳定的位置来说,图2中条纹的可见度(或对比度)随时间明显增强,可见度的定义为[23]:

式中Imax和Imin分别为干涉条纹强度的最大值和最小值.图4中展示和比较了3个不同时刻(t1、t2和t3)的、某个空间范围内(y=640–690 pixel)的干涉条纹(图2中也标记了相应时间和范围).根据(4)式可见度的定义,可计算出每个时刻的可见度在多个空间位置上的平均值.图3(b)显示了空间平均可见度随时间的变化及其线性拟合结果.结果显示在近4 h之内可见度由1%增加至9%.
3 干涉条纹的消除
实测显示上文提及的“简便消除法”并不适用该成像系统,因此基于对条纹空间分布及时间变化特性的分析,我们尝试了两种消除条纹的方法:一是“硬件消除”,主要是通过改造CCD前置封窗玻璃膜层来调制干涉条纹间距;二是“算法消除”,主要强调了对平场校正后的残留条纹的提取和处理.
3.1 方法1:硬件消除法
根据上述分析结果,我们首先猜测CCD光敏介质前置封窗玻璃可能是产生这种等厚条纹的薄膜结构.在Hα成像系统光路中,入射光可以认为是正入射至CCD靶面(实际入射角度约为±2°).则由(3)式可知条纹间距与薄膜楔角α的正切值成反比.如果增加α角度使条纹间距远小于一个像元的尺度,条纹就会在图像中变得不可分辨.

图4 3个不同时刻干涉条纹的强度对比,采集时刻为图2中竖线所示Fig.4 Com parison o f fringe intensities at th ree d ifferen t tim es,ind icated by th ree vertica l lines in Fig.2
具体估算过程如下:已知实测中入射光波长为656.3 nm、CCD膜层前置封窗介质的折射率约为1.5(石英玻璃材质)、CCD像元大小为9µm,计算得出楔角α=1.3°时干涉条纹间距约等于像元大小.这一结果得到CCD厂家的确认并最终采用增加封窗玻璃楔角至2°的方案.改造后的CCD在南京大学研制的Optical and Near-Infrared Solar Eruption Tracer(ONSET)望远镜[24]的Hα通道试用,图5为改造后的观测图像,图中大部分干涉条纹已经消失,仅在1/24的视场范围内发现条纹,条纹可见度低于0.6%.

图5 南京大学ONSET望远镜CCD光敏介质前置玻璃封窗改造后的实测结果.CCD全靶面为3104 p ixel×2672 p ixel,这里只展示局部视场,黑框面积约占总面积的1/24.Fig.5 Partial field-of-view of the observational data taken by a m odified CCD cam era installed on the ONSET of Nan jing Un iversity.The fu ll size is 3104 p ixel×2672 p ixel,and the rectang le denotes abou t 1/24 o f field-o f-v iew.
3.2 方法2:算法消除法
我们倾向于认为干涉条纹对太阳图像来说是一种乘性信号,可以利用常规平场校正(相除)来消除.然而实测过程中平场无法实时(或频繁)采集以校正时变的干涉条纹,因此常规平场校正后的残留干涉条纹的提取和处理则成为主要的关注对象[16,22].本工作的思路是在数据中提取出仅含有条纹图像的条纹平场,用其对数据再做一次校正从而将条纹大幅度地消除,主要步骤如图6所示.
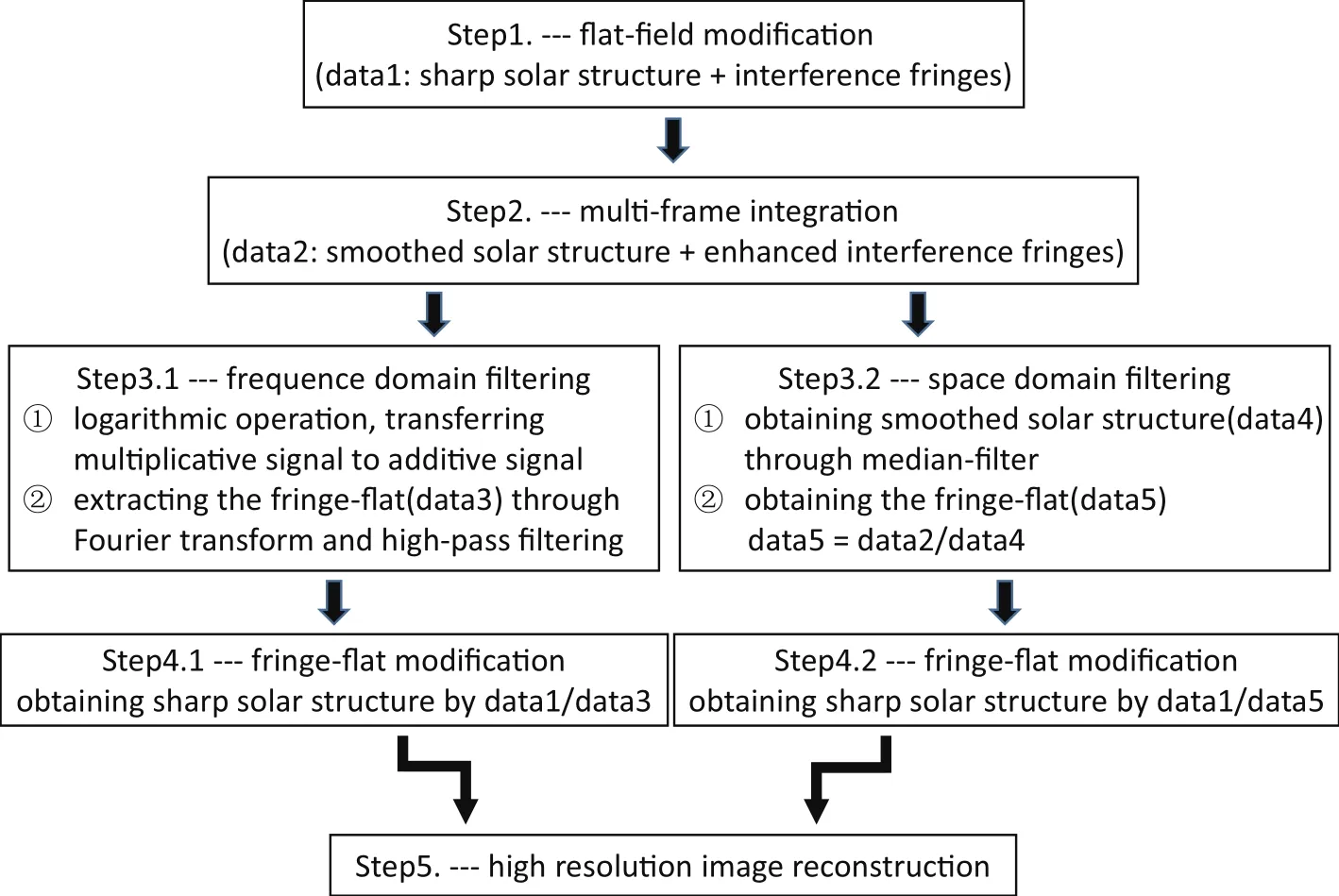
图6 图像滤波提取并处理干涉条纹图样的基本流程Fig.6 The flow chart of ex tracting and elim inating interference fringes through im age filtering
(1)第1步,观测数据进行常规平场校正,部分数据可以消除大部分干涉条纹,但部分数据仍残留干涉条纹(data1).
(2)第2步,把与图像(data1)间隔一定时间之内的多幅图像进行积分(累加).考虑到望远镜的指向精度以及大气和风速的影响(30m in之内图像晃动的峰-谷值约3–8 arcsec),多幅图像积分既能有效地平滑太阳精细结构,又能增强位置样式固定不变的干涉条纹信号(即得data2).最长时间间隔则受到干涉条纹强度时变的限制,该限制将在讨论部分详细描述.
(3)第3步,采用滤波方法提取干涉条纹获得条纹平场.我们分别采用了频域滤波(Step3.1)和空域滤波(Step3.2)两种方法.频域滤波是指将空域图像通过傅里叶变换至频域再进行高通处理最后变换回空域得到干涉条纹图样.这里值得注意的是在做频域滤波之前,空域图像(data2)首先进行了对数运算,把太阳图像与干涉条纹之间的“乘性关系”转变为“加性关系”(即Ln[data2]=Ln[A×B]=LnA+LnB,其中A成分对应太阳图像,而B对应干涉条纹),然后再利用二维线性傅里叶变换分别提取高低频率信号,最后再进行一次反对数运算得到平滑太阳图像和干涉条纹图像.高通滤波的截止频率选择是以“平滑太阳图像中干涉条纹可见度低于1%”为下限.干涉条纹图像归一化后生成条纹平场(data3).而空域滤波是指直接对空域图像(data2)进行中值非线性滤波将干涉条纹完全平滑掉,仅剩余平滑太阳图像(data4),然后用积分图像除以平滑太阳像从而获得条纹平场(即data5=data2/data4).图7强对比度地展示和对比了积分时间为15m in时用上述两种方法获得的条纹平场(图7中(a1)为频域滤波结果,(a2)为空域滤波结果),从中可以看出:条纹平场中太阳结构几乎不可见,只剩余由大尺度长寿命的太阳结构(诸如数据中宽10 arcsec、长80 arcsec的暗条)所造成的痕迹.该痕迹的覆盖范围内强度变化为0.97–1.03,而且通过比较后发现两种滤波方法得到的条纹平场中该痕迹的强度变化范围差别不大,都会轻微影响该区域内太阳结构的相对强度,但这种残留的太阳结构强度的大小受到提取条纹平场时所选取的积分时间长短的影响,这种影响将在讨论部分中进一步阐述.其次图7(b)显示两种方法获得的条纹平场在数值大小上差别不大,比值浮动在0.99–1.02范围内.
(4)第4步,数据(data1)进行再一次的条纹平场(data3和data5)校正.图7(c1)和(c2)显示了校正后与校正前(图7(d))的对比,干涉条纹可见度大幅度降低,由原来的4.7%降低到0.6%以下.

图7 含有干涉条纹的图像与处理结果对比.(a1)采用频域傅里叶变换滤波方法获得的条纹平场;(a2)采用空域中值滤波方法获得的条纹平场;(b)两个条纹平场的强度比值;(c1)利用(a1)条纹平场对数据进行再次平场校正所得到的结果; (c2)利用(a2)条纹平场对数据进行再次平场校正所得到的结果;(d)没有进行条纹平场校正的数据.Fig.7 Com parison o f the data before and a fter fringe-flat ca lib ration.(a1)the fringe-flat reconstructed w ith the Fou rier transform filtering techn ique;(a2)the fringe-flat reconstructed w ith the m ed ian-filter m ethod;(b)the ratio betw een tw o fringe-flats;(c1)an im age calib rated using the fringe-flat show n in the panel(a1);(c2)an im age calib rated using the fringe-flat show n in the panel(a2);(d)an im age w ithou t calib ration of the fringe-flat.
4 结果与讨论
使用薄型CCD采集的数据中所出现的条纹通常认为是一种薄膜干涉引起的等厚条纹.作为NVST成像系统中色球观测窗口的Hα通道使用的是由南京天文光学技术研究所研制的窄带Lyot滤光器[25],透过带带宽仅为0.025 nm,出射光具有较强的单色性,容易满足产生薄膜干涉的条件,常规平场校正有时无法完全将其消除.丽江2.4m望远镜的测光观测[16]以及日本飞弹天文台Domeless Solar Telescope的光谱观测(私人交流)均出现类似情况,说明观测过程中干涉条纹随时间发生了变化.
2015年3月5日连续4 h的偏带观测数据分析显示,干涉条纹的位置或样式随时间基本不变,但强度明显增强,导致常规平场校正效果有限.采用调整CCD的安装角度或其他简便经验方法不能解决上述问题.我们推断主要原因是观测过程中入射光的强度以及入射光与CCD靶面位置的相对角度随时间发生了变化,而且产生等厚条纹的薄膜结构与靶面位置距离很近.
基于上述推断,我们首先尝试增加CCD前置封窗玻璃楔角的方法,改造后大部分干涉条纹在数据中不可见.其次采用滤波方法获得条纹平场,用其对数据进行再一次的平场校正.上文提到多幅图像积分对于平滑太阳结构并增强条纹信号非常重要.从平滑太阳结构这个角度来讲,积分时间越长,条纹平场中所含的太阳结构就越少,对最终结果中太阳结构的形态或相对强度的影响就越小.以该组数据为例,当积分时间为1 m in时,残留的暗条结构所覆盖的范围内具有0.93–1.03的强度变化,会对相对强度造成最大约8%的影响;而当积分时间增加到1 h后,残留的暗条结构所覆盖的范围内强度变化为0.98–1.02,对相对强度造成的最大影响则降为约2%.
单从上面的分析来看,应该采用尽可能长的积分时间,但是条纹强度的明显时变对积分时间又提出了上限要求.图8中我们分别给出了积分时间为20 m in、30 m in和60 m in时的处理结果,从中我们发现:无论是频域滤波还是空域滤波,当积分时间过长时,结果中条纹的可见度会逐渐增加.定量来说,以05:39UT数据为例,没有经过条纹平场校正时条纹可见度高达4.7%,经过利用20m in积分数据提取出来的条纹平场修正后,残留条纹可见度约为0.7%,消除率达到约86%;当积分时间达到30m in时,残留条纹可见度约为1%,消除率降为约79%;当积分时间长达60m in时,残留条纹可见度约为1.6%,消除率仅为约66%.因此我们给出经验积分时间为15–20 m in左右.需要说明的是,对于条纹强度的变化,目前倾向于认为是由于光斑的入射角变化造成的,而入射角的变化主要是由望远镜弯沉引起的光轴变化所致.根据已有研究结果,光轴的变化与望远镜高度轴的变化有关[26−27],按照太阳的运行规律,夏至时高度变化最快,入射角变化比较剧烈,冬至时高度变化最慢,入射角的变化也最为缓慢,在全年中的这两个日期附近,用条纹平场来处理数据中存在的干涉条纹时应该适当缩短或延长积分的时间.本文中所用的数据拍摄于2015年3月5日,高度轴变化速度比较适中,给出的经验积分时间对于大多数的观测日都可以适用.
这里需要指出的一点是,除了文中所涉及的宁静区偏带观测数据之外,本文提出的方法还可以适用于小尺度的气孔区、弥散谱斑区或新浮现区数据.而对于大尺度或复杂黑子区而言,该方法提取的条纹平场会残留较为明显的太阳结构,从而影响结果中太阳结构的相对亮度分布.此时我们将会尝试使用Chae[28]提出的方法,该方法的优劣特性就不在本文中展开讨论了.
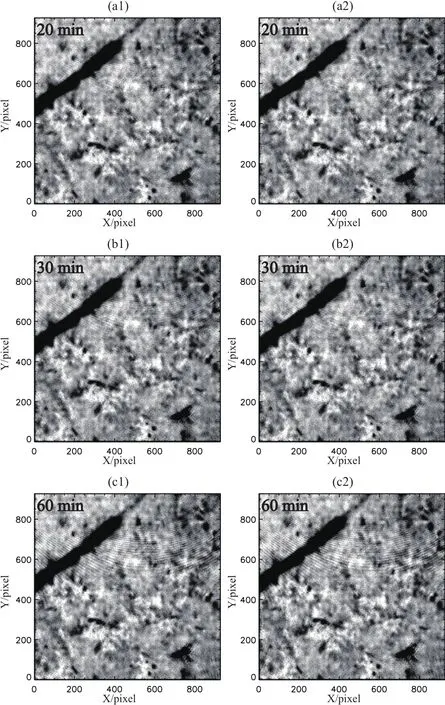
图8 对比显示利用不同积分时间所提取的条纹平场对数据进行再次平场校正的结果.从上到下积分时间分别为20 m in、30 m in和60 m in.左侧:采用频域傅里叶变换滤波方法;右侧:采用空域中值滤波方法.为了突显强度较弱的条纹,我们增强了图像显示的对比度.Fig.8 Com parison o f the resu lts ca lib rated using d ifferen t fringe-flats,w h ich are derived from the im ages in tegrated over d ifferen t tim es.From top to bottom:20-m inu te integration,30-m inu te in tegration,and 60-m inu te in tegration.Left:resu lts w ith the Fou rier transform filtering technique in frequency dom ain; R ight:resu lts w ith the m ed ian-filter m ethod in space dom ain.W e have enhanced the contrast ratio in order to m ake som e fain tish fringes p rom inen t.
最后我们也指出当干涉条纹在二维空间分布上出现样式变化(即条纹分布或间距的变化)时,单纯的傅里叶变换滤波可能不能很好地解决这个问题.Rojo等[13]和Wang等[22]曾利用小波分析方法重建局部区域内的条纹信息,然而他们的数据中条纹样式较为简单,均被作者们简化为一维情况.针对该工作中提及的数据,我们在空域图像的行和列两个方向上分别进行一维小波分析,尝试在不同空间位置上提取不同样式的条纹信息.由于方法的局限性,我们没有在文中展示该结果,但这里指出利用二维小波分析此类问题的可能性.
致谢本文所用数据来自中国科学院云南天文台抚仙湖1m新真空太阳望远镜实测数据.
[1]叶彬浔,孟新民,王传晋.天文学报,1985,26:172
[2]栗志,李志,杨晓宁.云南天文台台刊,1989,4:13
[3]How ell S B.Handbook o f CCD A stronom y.Second ed ition.New York:Cam b ridge Un iversity P ress, 2006:17
[4]秦松年,李如凤,高彩.天文学报,1989,30:387
[5]马亮,危峻,黄小仙.光谱学与光谱分析,2014,34:1995
[6]张建卫,蒋玉龙,马秀芳,等.光学仪器,1998,20:24
[7]李锦英,徐炳生.物理实验,1992,12:13
[8]曾繁清.分析测试通报,1990,9:77
[9]K ubiˇcela A,Jev rem ov i´c D,Pop ovi´c LˇC,et a l.BABel,1994,150:37
[10]刘志航,余素华,袁润权.光谱实验室,2012,29:2360
[11]杨晓宁,栗志.空间科学学报,1990,10:237
[12]M alum u th E M,H ill R S,Gu ll T,et a l.PASP,2003,115:218
[13]Ro jo P,Harrington J.AJ,2006,649:553
[14]M ellau G C,W innew isser B P.ASPC,1995,81:138
[15]陈建生,范晓明,唐小英.天文学报,1987,28:303
[16]郑中杰,彭青玉.天文研究与技术,2013,10:416
[17]How ell S B.PASP,2012,124:263
[18]Liu Z,X u J,Gu B Z,et a l.RAA,2014,14:705
[19]屈会雪,杨云飞,冯松,等.天文学报,2015,56:454
[20]Yang S H,Zhang J,X iang Y Y.A p JL,2015,798:L 11
[21]Yan X L,Xue Z K,X iang Y Y,et al.RAA,2015,15:1725
[22]W ang R,Xu Z,Jin Z Y,et a l.RAA,2013,13:1240
[23]祁胜文,赵彦杰,王宝泉.山东师范大学学报:自然科学版,2003,18:38
[24]Fang C,Chen P F,Li Z,et al.RAA,2013,13:1509
[25]徐稚,杨磊,向永源,等.天文研究与技术,2014,11:239
[26]校启公,柳光乾,邓林华,等.天文研究与技术,2013,10:179
[27]柳光乾,校启公,邓林华,等.中国激光,2013,40:0108004-1
[28]Chae J.SoPh,2004,221:1
Study and Rem oval of the Interference Fringes in Im ages Observed by the Im aging System of NVST
WANG Si-bo1,2XU Zhi1XIANG Yong-yuan1JIN Zhen-yu1
(1 Yunnan A stronom ica l Observatories,Chinese A cadem y o f Sciences,K unm ing 650216) (2 Un iversity o f Chinese A cadem y o f Scien ces,Beijing 100049)
The 1-meter New Vacuum Solar Telescope is a new generation groundbased solar observation facility of China,located at the FuXian-Lake Solar Observatory of Yunnan Observatories.One of its instrumentations is a five-channel high-resolution image system,while theHα-channel isused as the traditionalway for solar chromospheric observation.Using a pco.4000 CCD as the detector,we usually observe com plicated fringes resulted from the thin-film interference in scientific data.These fringes can not be elim inated comp letely by flat-field calibration,and even be intensified after image reconstruction processes.From about 4-hour continuous Hαoff-band observations,we study the temporal-variation of the fringe pattern and am plitude.We find that in contrast to the stable pattern,the fringe amp litude obviously changed w ith time.The visibility increases 9 times over 4 hours.We speculate that it is due to the temporalvariation of the incident light intensity and the direction w ith respect to the CCD position.Consequently,we suggest two methods to calibrate or elim inate the fringes. On one hand,we suggest to change the CCD inner-glass-w indow to a wedge-shapew ith a wedge-angle of about 2 degree in order to reduce the fringe-interval to a CCD pixel size.It is shown that this change can elim inate themajority of fringes.Only few fringes w ith the visibility of 0.6%can be found in 1/24 of field-of-view.On the other hand, wemake efforts to elim inate the fringes by correcting the data using a so-called fringeflat again after the normal data reduction(flat-field and dark-field modification).A fringe-flat is extracted from the data by using a Fourier filtering technique in frequency dom ain or amedian-filter in space domain,and both produce a very sim ilar resu lt.We find that the corrected data using the fringe-flat produces a substantial reduction in the fringe am p litude w ith the visibility decreasing to about 1/8.However,we have to point out that there inevitably exist some vestiges of long-lived and large-scale solar structures in the fringe-flat.In return,the intensity of these structuresw illbe som ehow modified.Consequently,it issuggested to integrate the data over a certain time interval in order to enhance the fringes and smooth the high frequency solar structures.The em pirical suggestion of themaximum interval is about 20m inutes.
instrumentation:detectors,methods:data analysis,methods:observational,techniques:im age processing
P141;
A
10.15940/j.cnki.0001-5245.2016.05.010
2016-02-05收到原稿,2016-03-30收到修改稿
∗国家自然科学基金项目(11473064)以及中国科学院基础局物质科学前沿与交叉项目资助
†wangsibo@ynao.ac.cn
‡xuzhi@ynao.ac.cn
